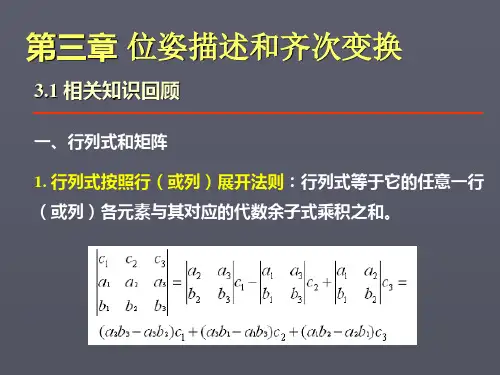
位姿描述与齐次变换
- 格式:ppt
- 大小:760.00 KB
- 文档页数:32



五年级数学下册教学计划一、学生基本情况分析五年级二班现有学生52人。
大部分学生对数学学习的积极性比较高,能从已有的知识和经验出发获取知识,抽象思维能力也有了一定的发展,基础知识掌握比较牢固,有一定的学习数学的能力。
在课堂上大部分学生能积极主动地参与学习过程,具有一定的观察、分析、自学、表达、操作、与人合作等一般能力,在小组合作中,同学之间会交流合作,但自主探讨能力不高。
也有一部分的学生基础知识差,上课不认真听讲,不能独立完成学习任务,需要老师督促并辅导。
还有一部分比较认真但解决问题的能力较差,只能掌握一些基础知识,稍稍拐个弯就不知所措。
本学期重点还是抓好学习上有困难的学生教学,在教学中,面向全体学生,创设愉快情境教学,激发他们的学习动机,进入最佳学习的动态。
全面提高教学质量,让每一位学生都在数学学习上得到最大限度的发展。
二、教材分析在数与代数方面,这一册教材安排了因数与倍数、分数的意义和性质,分数的加法和减法。
因数与倍数,在前面学习整数及其四则运算的基础上教学初等数论的一些基础知识,包括因数和倍数的意义,2、5、3的倍数的特征,质数和合数。
教材在三年级上册分数的初步认识的基础上教学分数的意义和性质以及分数的加法、减法,结合约分教学最大公因数,结合通分教学最小公倍数。
在空间与图形方面,这一册教材安排了观察物体、图形的变换、长方体和正方体三个单元。
在已有知识和经验的基础上,通过丰富的现实的数学活动,让学生获得探究学习的经历,认识图形的轴对称和旋转变换;探索并体会长方体和正方体的特征、图形之间的关系,及图形之间的转化,掌握长方体、正方体的体积及表面积公式,探索某些实物体积的测量方法,促进学生空间观念的进一步发展。
在统计方面,本册教材让学生学习有关单式和复式折线统计图的知识。
在用数学解决问题方面,教材一方面结合分数的加法和减法、长方体和正方体两个单元,教学用所学的知识解决生活中的简单问题;另一方面,安排了“数学广角”,引导学生通过观察、猜测、实验、推理等活动向学生渗透优化的数学思想方法,体会解决问题策略的多样性及运用优化的方法解决问题的有效性,感受数学的魅力。
工业机器人技术课程总结任课:班级:学号:姓名:之前在工厂实习见识和操作过很多工业机器人,有焊接机器人,涂装机器人,总装机器人等,但是学习了盖老师教授的工业机器人课程,才真正算是进入了工业机器人的理论世界学习机器人的相关知识。
以下是课程总结。
一、第一章主要是对机器人的概述,从机器人的功能和应用、机器人的机构以及机器人的规格全面呈现学习机器人的框架。
研制机器人的最初目的是为了帮助人们摆脱繁重劳动或简单的重复劳动,以及替代人到有辐射等危险环境中进行作业,因此机器人最早在汽车制造业和核工业领域得以应用。
随着机器人技术的不断发展,工业领域的焊接、喷漆、搬运、装配、铸造等场合,己经开始大量使用机器人。
另外在军事、海洋探测、航天、医疗、农业、林业甚到服务娱乐行业,也都开始使用机器人。
本书主要介绍工业机器人,对譬如军用机器人等涉及不多。
机器人的机构方面,主要介绍了操作臂的工作空间形式、手腕、手爪、和闭链结构操作臂。
工作空间形式常见的有直角坐标式机器人、圆柱坐标式机器人、球(极)坐标式机器人、SCARA机器人以及关节式机器人。
手腕的形式也可分为二自由度球形手腕、三轴垂直相交的手腕以及连续转动手腕。
同时手爪也可分为夹持式手爪、多关节多指手爪、顺应手爪。
机器人的其他规格主要介绍驱动方式、自动插补放大、坐标轴数、工作空间、承载能力、速度和循环时间、定位基准和重复性以及机器人的运行环境。
第一章的内容主要是对机器人各个方面有个简单的介绍使机器人更形象化和具体化。
工业机器人定义为一种拟人手臂、手腕和手功能的机电一体化装置,能将对象或工具按照空间位置姿态的要求移动,从而完成某一生产的作业要求。
工业机械应用:主要代替人从事危险、有害、有毒、低温和高热等恶劣环境中的工作;代替人完成繁重、单调重复劳动。
它带来的好处:减少劳动力费用提高生产率改进产品质量增加制造过程柔性减少材料浪费控制和加快库存的周转消除了危险和恶劣的劳动岗位。
机器人的直角坐标型:结构简单;定位精度高;空间利用率低;操作范围小;实际应用较少。
工业机器人技术课程总结任课:班级:学号:姓名:之前在工厂实习见识和操作过很多工业机器人,有焊接机器人,涂装机器人,总装机器人等,但是学习了盖老师教授的工业机器人课程,才真正算是进入了工业机器人的理论世界学习机器人的相关知识。
以下是课程总结。
一、第一章主要是对机器人的概述,从机器人的功能和应用、机器人的机构以及机器人的规格全面呈现学习机器人的框架。
研制机器人的最初目的是为了帮助人们摆脱繁重劳动或简单的重复劳动,以及替代人到有辐射等危险环境中进行作业,因此机器人最早在汽车制造业和核工业领域得以应用。
随着机器人技术的不断发展,工业领域的焊接、喷漆、搬运、装配、铸造等场合,己经开始大量使用机器人。
另外在军事、海洋探测、航天、医疗、农业、林业甚到服务娱乐行业,也都开始使用机器人。
本书主要介绍工业机器人,对譬如军用机器人等涉及不多。
机器人的机构方面,主要介绍了操作臂的工作空间形式、手腕、手爪、和闭链结构操作臂。
工作空间形式常见的有直角坐标式机器人、圆柱坐标式机器人、球(极)坐标式机器人、SCARA机器人以及关节式机器人。
手腕的形式也可分为二自由度球形手腕、三轴垂直相交的手腕以及连续转动手腕。
同时手爪也可分为夹持式手爪、多关节多指手爪、顺应手爪。
机器人的其他规格主要介绍驱动方式、自动插补放大、坐标轴数、工作空间、承载能力、速度和循环时间、定位基准和重复性以及机器人的运行环境。
第一章的内容主要是对机器人各个方面有个简单的介绍使机器人更形象化和具体化。
工业机器人定义为一种拟人手臂、手腕和手功能的机电一体化装置,能将对象或工具按照空间位置姿态的要求移动,从而完成某一生产的作业要求。
工业机械应用:主要代替人从事危险、有害、有毒、低温和高热等恶劣环境中的工作;代替人完成繁重、单调重复劳动。
它带来的好处:减少劳动力费用提高生产率改进产品质量增加制造过程柔性减少材料浪费控制和加快库存的周转消除了危险和恶劣的劳动岗位。
机器人的直角坐标型:结构简单;定位精度高;空间利用率低;操作范围小;实际应用较少。

使用齐次变换矩阵计算位姿
使用齐次变换矩阵可以进行位姿的计算。
在三维空间中,齐次变换矩阵可以表示三维旋转和平移的组合操作。
一般来说,齐次变换矩阵是一个4x4的矩阵,可以表示为:
[R t]
[0 1]
其中,R是一个3x3的旋转矩阵,表示三维旋转操作,t是一个3x1的平移向量,表示平移操作。
假设我们有一个初始位姿的齐次变换矩阵T0,表示初始位置和姿态。
如果我们想要计算一个
相对于初始位姿的新位姿,我们可以使用一个相对变换矩阵Trel:
Trel = [Rrel trel]
[0 1]
其中,Rrel是一个3x3的旋转矩阵,表示相对于初始位姿的旋转操作,trel是一个3x1的平移
向量,表示相对于初始位姿的平移操作。
我们可以将Trel与T0相乘来计算新的位姿Tnew:
Tnew = Trel * T0
即:
[Rnew tnew] = [Rrel trel] * [R0 t0]
[0 1]
[Rnew tnew] = [Rrel * R0 Rrel * t0 + trel]
可以看到,通过相对变换矩阵Trel和初始位姿的齐次变换矩阵T0来计算新的位姿Tnew,实
际上就是将相对变换应用于初始位姿。
通过多次计算相对变换来进行位姿的累加计算,可以实现物体在三维空间中的运动轨迹。
同时,还可以通过逆运算反推出相对变换矩阵,从而得到物体运动的轨迹。
需要注意的是,在计算位姿时,要确保旋转矩阵R是正交矩阵,即满足R^T * R = I或R * R^T = I,以确保旋转操作的准确性。
同时,还要确保平移向量t是经过归一化处理的。