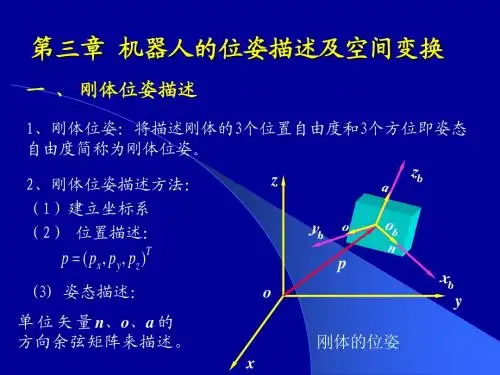
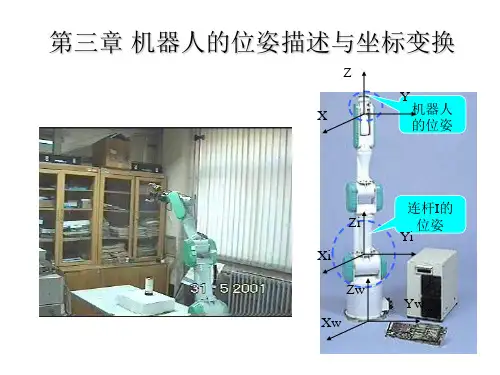
机器人的位姿描述与坐标变换
- 格式:pdf
- 大小:77.87 MB
- 文档页数:66


位姿描述与齐次变换PPT](https://uimg.taocdn.com/711ba841caaedd3383c4d3c4.webp)
机器人运动学中变换矩阵左乘右乘的理解机器人运动学中变换矩阵的左乘和右乘的理解1.引言机器人运动学是机器人学中的重要分支,研究机器人在空间中的运动及其相关变换。
其中,变换矩阵的理解和运用在机器人运动学中起到关键作用。
在机器人的位姿变换中,变换矩阵的左乘和右乘是我们需要理解和掌握的概念。
本文将深入探讨机器人运动学中变换矩阵左乘和右乘的理解及其应用,并分享个人观点和理解。
2.变换矩阵的基本概念在机器人运动学中,变换矩阵是描述机器人位姿变换的一种方式。
它通过矩阵的形式,将初始坐标系中的点映射到目标坐标系中。
在机器人运动学中,我们通常使用齐次变换矩阵来表示位姿变换,即4x4的矩阵。
3.变换矩阵的左乘和右乘在机器人运动学中,变换矩阵可以通过左乘和右乘来实现坐标系的变换。
左乘是指将变换矩阵放在被变换点的左边,而右乘是指将变换矩阵放在右边。
两者的区别在于坐标系变换的次序不同。
3.1 左乘的理解和应用左乘表示先进行变换矩阵的操作,再对被变换点进行坐标系的变换。
这种方式常用于描述从物体坐标系到参考坐标系的变换。
在机器人运动学中,我们通常使用齐次变换矩阵的左乘来描述机械臂末端执行器的位姿变换。
通过左乘变换矩阵,我们可以将机械臂末端执行器的位姿从机械臂坐标系变换到参考坐标系中。
3.2 右乘的理解和应用右乘表示先对被变换点进行坐标系的变换,再进行变换矩阵的操作。
这种方式常用于描述从参考坐标系到物体坐标系的变换。
在机器人运动学中,我们通常使用齐次变换矩阵的右乘来描述相机与物体之间的位姿关系。
通过右乘变换矩阵,我们可以将物体的位姿从参考坐标系变换到相机坐标系中。
4.变换矩阵左乘和右乘的对比相比而言,左乘和右乘的区别在于变换的次序不同,即坐标系变换与矩阵操作的顺序不同。
左乘更适用于描述物体坐标系到参考坐标系的变换,而右乘更适用于描述参考坐标系到物体坐标系的变换。
在实际应用中,根据不同的问题和需求,我们可以灵活运用左乘和右乘的方式来描述机器人的位姿变换。