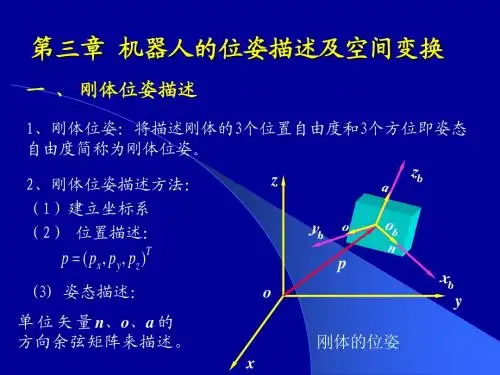
2、机器人的位姿描述与坐标变换.
- 格式:doc
- 大小:3.21 MB
- 文档页数:25

机器人学第二章机器人的位姿描述与坐标变换战强北京航空航天大学机器人研究所第二章 机器人的位姿描述与坐标变换 机器人的位姿连杆I 的位姿YX ZYi XiZi YwXwZw2-1、基本概念1) 自由度(Degree of Freedom, DOF):指一个点或一个物体运动的方式,或一个动态系统的变化方式。
每个自由度可表示一个独立的变量,而利用所有的自由度,就可完全规定所研究的一个物体或一个系统的位置和姿态。
也指描述物体运动所需的独立坐标数,3维空间需要6个自由度。
2) 操作臂(Manipulator):具有和人手臂(Arm)相似的功能、可在空间抓放物体或进行其它操作的机电装置。
----Arm3) 末端执行器(End-Effector):位于机器人腕部的末端,直接执行工作要求的装置。
如灵巧手、夹持器。
----Hand/Gripper4) 手腕(Wrist):位于执行器与手臂之间,具有支撑和调整末端执行器姿态功能的机构。
操作臂的组成部分之一。
5)手臂(Arm):位于基座和手腕之间,由操作手的动力关节和连杆等组成的组件。
能支撑手腕和末端执行器,并具有调整末端执行器位置的功能。
操作臂的组成部分。
Outdated!6) 世界坐标系(World Coordinate System):参照地球的直角坐标系。
7)机座坐标系、基坐标系(Base reference coordinate system):参照机器人基座的坐标系,即机器人末端位姿的参考坐标系。
8)坐标变换(Coordinate Transformation):将一个点的坐标描述从一个坐标系转换到另一个坐标系下描述的过程。
手腕机座手臂Yw XwZw9)位姿(Position&Pose):机器人末端执行器在指定坐标系中的位置和姿态。
10)工作空间(Working Space):机器人在执行任务时,其腕轴交点能在空间活动的范围。
由连杆尺寸和构形决定。
位姿描述与齐次变换PPT](https://uimg.taocdn.com/711ba841caaedd3383c4d3c4.webp)
机器人编程常用的四大语言介绍伴随着机器人的发展,机器人语言也得到了发展和完善,机器人语言已经成为机器人技术的一个重要组成部分。
机器人的功能除了依靠机器人的硬件支撑以外,相当一部分是靠机器人语言来完成的。
早期的机器人由于功能单一,动作简单,可采用固定程序或者示教方式来控制机器人的运动。
随着机器人作业动作的多样化和作业环境的复杂化,依靠固定的程序或示教方式已经满足不了要求,必须依靠能适应作业和环境随时变化的机器人语言编程来完成机器人工作。
下面就来了解一下常见的机器人编程语言吧!VAL语言一、VAL语言及特点VAL语言是美国Unimation公司于1979年推出的一种机器人编程语言,主要配置在PUMA和UNIMATION等型机器人上,是一种专用的动作类描述语言。
VAL语言是在BASIC语言的基础上发展起来的,所以与BASIC语言的结构很相似。
在VAL的基础上Unimation公司推出了VALⅡ语言。
VAL语言可应用于上下两级计算机控制的机器人系统。
上位机为LSI-11/23,编程在上位机中进行,上位机进行系统的管理;下位机为6503微处理器,主要控制各关节的实时运动。
编程时可以VAL语言和6503汇编语言混合编程。
VAL语言命令简单、清晰易懂,描述机器人作业动作及与上位机的通信均较方便,实时功能强;可以在在线和离线两种状态下编程,适用于多种计算机控制的机器人;能够迅速地计算出不同坐标系下复杂运动的连续轨迹,能连续生成机器人的控制信号,可以与操作者交互地在线修改程序和生成程序;VAL语言包含有一些子程序库,通过调用各种不同的子程序可很快组合成复杂操作控制;能与外部存储器进行快速数据传输以保存程序和数据。
VAL语言系统包括文本编辑、系统命令和编程语言三个部分。
在文本编辑状态下可以通过键盘输入文本程序,也可通过示教盒在示教方式下输入程序。
在输入过程中可修改、编辑、生成程序,最后保存到存储器中。
在此状态下也可以调用已存在的程序。
《工业机器人原理与操作》教学大纲一、课程的性质、地位与任务《工业机器人原理与操作》是本专业核心课,它是培养学生具有机器人设计和使用的能力,本课程主要研究机器人的结构设计与基本理论。
通过本课程的学习,可使学生掌握工业机器人基本概念、机器人运动学理论、工业机器人机械系统设计、工业机器人控制等方面的知识。
二、教学基本要求基本理解机器人的一般特征,坐标系统、位置运动学、速度运动学和动力学等。
具备机器人世界坐标系统和手坐标系统的转化,根据位置运动学、速度运动学、动力学及自动控制理论的相关知识解决问题的能力。
具体要求学生做到:1.掌握工业机器人运动系统设计方法,具有进行总体设计的能力;2.掌握工业机器人整体性能、主要部件性能的分析方法;3.掌握工业机器人常用的控制理论与方法,具有进行工业机器人控制系统设计的能力;4.了解工业机器人的新理论,新方法及发展趋向。
四、教学内容与学时安排任务一概论……4学时本章教学目的和要求:了解工业机器人的发展事由和历程,机器人的定义。
教学重点:介绍工业机器人的产生和发展过程,掌握机器人的概念、熟悉工业机器人的常见分类及其行业应用。
教学难点:工业机器人的常见分类及其行业应用任务主要内容(理论):第一节什么是工业机器人第二节为什么发展工业机器人第三节机器人的发展概况一、工业机器人的诞生二、工业机器人的发展现状和趋势第四节工业机器人的分类及应用一、工业机器人的分类二、工业机器人的应用任务二机器人的结构设计……16学时本章教学目的和要求:1.了解相关的参数含义及设置2.掌握机器人的基本结构组成3.了解机器人设计的基本原理,基本方法教学重点:机器人的基本结构组成,关节、自由度等概念。
教学难点:机器人关节、自由度的概念任务主要内容(理论):第一节机器人的基本组成及技术参数(4学时)一、机器人的基本组成二、机器人的技术参数第二节机器人总体设计(4学时)一、零部件的初认识二、机械臂设计工艺三、机械臂的装配任务主要内容(实训):的三维实体零件,并完成零件的组装。