第四章 多自由度系统振动(a)解析
- 格式:ppt
- 大小:3.04 MB
- 文档页数:95
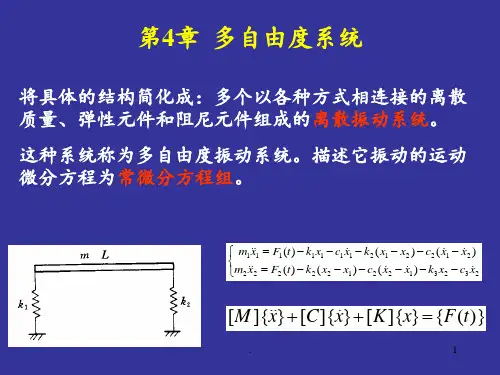
多自由度振动系统分析引言:振动是物体在受到外力作用后,由于其固有特性而产生的周期性运动。
在实际生活和工程中,我们经常会遇到各种各样的振动现象,如桥梁的振动、机械系统的振动等。
而多自由度振动系统是一种复杂的振动系统,其分析和研究对于我们理解振动现象的本质和设计工程中的振动控制至关重要。
一、多自由度振动系统的基本概念多自由度振动系统是指由多个质点组成的振动系统,每个质点都可以在空间中自由运动。
在这种系统中,每个质点都有其自身的质量、刚度和阻尼等特性。
多自由度振动系统的运动方程可以通过牛顿第二定律推导得到,其中包括了每个质点的加速度、速度和位移等信息。
二、多自由度振动系统的分析方法1. 模态分析模态分析是一种常用的多自由度振动系统分析方法。
它通过求解系统的特征值和特征向量,得到系统的固有频率和振型。
在模态分析中,我们可以利用拉格朗日方程对系统进行建模,并通过数学方法求解得到系统的模态参数。
模态分析可以帮助我们理解系统的固有特性,如共振频率、振动模态等。
2. 频域分析频域分析是一种基于傅里叶变换的多自由度振动系统分析方法。
通过将系统的运动方程转化为频域中的复数形式,我们可以得到系统在不同频率下的响应。
频域分析可以帮助我们研究系统在不同频率下的振动特性,如频率响应函数、频谱等。
3. 时域分析时域分析是一种基于时间的多自由度振动系统分析方法。
它通过求解系统的运动方程,得到系统在不同时间下的响应。
时域分析可以帮助我们研究系统的动态特性,如振动幅值、振动周期等。
三、多自由度振动系统的应用多自由度振动系统的分析和研究在工程领域有着广泛的应用。
例如,在桥梁工程中,我们需要对桥梁的振动特性进行分析,以确保桥梁在自然灾害或车流等外力作用下的安全性。
在机械工程中,我们需要对复杂机械系统的振动进行分析,以减少系统的振动噪声和提高系统的稳定性。
此外,多自由度振动系统的分析方法还可以应用于建筑结构、航空航天等领域。
结论:多自由度振动系统的分析对于我们理解振动现象的本质和设计工程中的振动控制至关重要。

绪论单元测试1.要产生振动,需要()。
A:时变作用B:空气C:弹性D:质量答案:ACD2.属于振动的是()。
A:敲鼓B:钟摆C:心脏搏动D:说话时的声带答案:ABCD3.已知船体结构的动态特性,计算在输入作用下的输出。
属于()。
A:系统识别B:响应分析C:环境预测D:系统设计答案:B4.在已知外界激励下设计合理的船体系统参数,使系统的动态响应或输出满足要求。
属于()。
A:系统识别B:响应分析C:系统设计D:环境预测答案:C5.已知系统的输入和输出,求出船体系统的参数。
属于()。
A:系统识别B:系统设计C:环境预测D:响应分析答案:A6.在已知系统的响应和系统参数的条件下,预测系统的输入。
属于()。
A:系统识别B:系统设计C:环境预测D:响应分析答案:C第一章测试1.在下图所示的结构中小球质量为m,梁的质量忽略不计,梁的长度为L,截面惯性矩为I,材料的弹性模量为E。
若要使小球的自振频率ω增大,可以()。
A:增大IB:减小EC:增大mD:增大L答案:A2.如图a所示,梁的质量忽略不计,小球的自振频率;若在小球处添加刚度为k的弹簧,如图b所示,则系统的自振频率ω1为:()。
A:B:C:D:答案:D3.单自由度系统自由振动的幅值仅取决于系统的()。
A:固有频率B:质量C:初速度和初位移D:刚度答案:C4.已知某单自由度系统质量为m,刚度为k,阻尼系数为c,阻尼因子为ξ。
若令系统刚度为4k,则下列说法正确的是()。
A:新的阻尼因子为1/2 ξB:新的阻尼因子为1/4 ξC:新的阻尼系数为1/2 cD:新的阻尼系数为1/4 c答案:A5.单自由度系统只有当阻尼比时,才会产生振动现象。
()A:ξ<1B:ξ≤1C:ξ>1D:ξ=1答案:A6.已知结构的自振周期T=0.3s,阻尼比ξ=0.04,质量m在y0=3mm,v0=0的初始条件下开始振动,则至少经过个周期后,振幅可以衰减到0.1mm以下。
()A:14B:13C:12D:11答案:A7.速度导纳的单位是()。
《振动力学》——习题第二章 单自由度系统的自由振动2-1 如图2-1 所示,重物1W 悬挂在刚度为k 的弹簧上并处于静止平衡位置,另一重物2W 从高度为h 处自由下落到1W 上且无弹跳。
试求2W 下降的最大距离和两物体碰撞后的运动规律。
解:222221v gW h W =,gh v 22=动量守恒:122122v gW W v g W +=,gh W W W v 221212+=平衡位置:11kx W =,kW x 11=1221kx W W =+,kW W x 2112+=故:kW x x x 21120=-= ()2121W W kgg W W k n +=+=ω故:tv t x txt x x n nn n nn ωωωωωωsin cos sin cos 12000+-=+-=xx 0x 1x 12平衡位置2-2 一均质等直杆,长为l ,重量为w ,用两根长h 的相同的铅垂线悬挂成水平位置,如图2-2所示。
试写出此杆绕通过重心的铅垂轴做微摆动的振动微分方程,并求出振动固有周期。
解:给杆一个微转角θ2aθ=h α2F =mg由动量矩定理:ah a mg a mg Fa M ml I M I 822cos sin 12122-=-≈⋅-====αθαθ其中12cossin ≈≈θααh l ga p ha mg ml n 22222304121==⋅+θθ g h a l ga h l p T n 3π23π2π222===2-3 一半圆薄壁筒,平均半径为R , 置于粗糙平面上做微幅摆动,如图2-3所示。
试求其摆动的固有频率。
图2-3 图2-42-4 如图2-4 所示,一质量m连接在一刚性杆上,杆的质量忽略不计,试求下列情况系统作垂直振动的固有频率:(1)振动过程中杆被约束保持水平位置;(2)杆可以在铅垂平面内微幅转动;(3)比较上述两种情况中哪种的固有频率较高,并说明理由。
图T 2-9 答案图T 2-9解:(1)保持水平位置:m kk n 21+=ω(2)微幅转动:mglllF2112+=mgl1l2xx2xx'mglll2121+=k2k1ml1l2()()()()()()()()()mgk k l l k l k l mgk k l l k l l k l l l k l mg k k l l k l k l l l l k l l mg l mgk l l l k l l l l l l k l l mg l l l l x x k F x x x 2122122212121221221121212221212211211121212122211211121221112111 ++=+-++=+-⋅+++=⎥⎦⎤⎢⎣⎡+-++++=+-+='+=故:()22212121221k l k l k k l l k e++=mk en =ω 2-5 试求图2-5所示系统中均质刚性杆AB 在A 点的等效质量。
第四章两自由度系统的振动当振动系统需要两个独立坐标描述其运动时,称为两自由度振动系统。
两自由度系统是最简单的多自由度系统,因此研究两自由度系统是分析和掌握多自由度系统的基础。
两自由度系统具有两个固有频率,两自由度系统以固有频率进行的振动与单自由度系统不同,它以固有频率进行的振动是指整个系统在运动过程中莫一位移形状,称为固有振型,因此两自由度具有两个与固有频率对应的两个固有振型。
在任意初始条件下的自由振动响应一般由两个固有振型的叠加得到。
受迫简谐振动的频率与激励频率相同。
两自由度系统的振动微分方程一般由两个联立的微分方程组成。
如果恰当地选取坐标,可使两个微分方程解除耦合,这种坐标称为主坐标或固有坐标。
用固有坐标建立的系统振动微分方程为两个独立的单自由度系统的微分方程。
4.1系统的自由振动如图所示的无阻尼两质量-弹簧系统,可沿光滑水平面滑动的两个质量与分别用弹簧与连至定点,并用弹簧相互连接。
三个弹簧的轴线沿同一水平线,质量与只限于沿着该直线进行往复运动。
这样与的任一瞬时的位置只需用坐标与就可以完全确定,因此该系统具有两个自由度。
图两自由度系统的振动取与的静平衡位置为坐标原点。
在振动过程中任一瞬时t,与的位置分别为与,作用于与的重力于光滑水平面的法向反力相平衡,在质量的水平方向作用有弹性恢复力和,质量的水平方向则受到和作用,方向如图所示。
取加速度和力的正方向与坐标正方向一致,根据牛顿运动定律有移项得方程()就是图所示的两自由度系统自由振动的微分方程,为二阶常系数线性齐次常微分方程组。
方程()可以使用矩阵形式来表示,写成由系数矩阵组成的常数矩阵m和k分别称为质量矩阵和刚度矩阵,向量x 称为位移向量。
因此设分别为刚度矩阵k中的元素,因而方程()可以写成方程()为系统自由振动的微分方程。
方程()是齐次的,如果和位方程()的一个解,那么与其相差一个因子的和也将是一个解。
通常感兴趣的是一种特殊形式的解,也就是和同步运动的解。