GPS与INSAR数据融合研究展望
- 格式:pdf
- 大小:204.85 KB
- 文档页数:5
第23卷第3期山东科技大学学报(自然科学版)Vol.23No.3 2004年9月Journal of Shandong University of Science and Technology(Natural Scienc e)Sep.2004文章编号:1672-3767(2004)03-0001-06InSAR技术的理论与应用研究现状及其展望刘国林1,2,郝晓光1,薛怀平1(1.中国科学院测量与地球物理研究所,湖北武汉430077;2.山东科技大学地球信息科学与工程学院,山东泰安271019)摘 要:介绍了合成孔径雷达的发展历史,概述了合成孔径雷达干涉测量和差分合成孔径雷达干涉测量的理论和应用研究现状,对今后的研究焦点进行了展望和分析。
关键词:合成孔径雷达;合成孔径雷达干涉测量;差分合成孔径雷达干涉测量;数据处理中图分类号:P225.1 文献标识码:APresent Status and Prospect of the Theoryand Application of InSAR TechnologyLIU Guo-lin1,2,HAO Xiao-guang1,XU E H ua-i ping1(1.Institute of Geodes y and Geophysics,Chinese Academy of Science,W uhan,Hubei430077,China;2.College of Geo-info Science and Eng.,SUST,T aian,Shandong271019,China)Abstract:The SAR development history is briefly introdued,and present status and prospect of the theoretic application study of InSAR and D-InSAR are g iven.T he prospect and analyses for the focus of InSAR research in future are proposed.Key words:SAR;InSAR;D-InSAR;data processing1 InSAR技术的发展概况合成孔径雷达干涉测量(Interferometric Synthetic Aperture Radar-InSAR)是合成孔径雷达(Sy nthetiC ApertureRadar SAR)技术与射电天文学干涉测量技术的合成。

GPS与惯性导航系统的组合定位方法与精度评定GPS(全球定位系统)和惯性导航系统(INS)都是现代导航领域中常用的定位技术。
然而,它们各自都存在一些限制,譬如GPS在城市峡谷地区存在信号遮挡问题,而INS则容易产生漂移误差。
为了克服这些限制,研究人员发现将GPS和INS通过组合定位方法结合使用,可以提供更准确和可靠的定位结果。
首先,我们来了解GPS定位技术。
GPS系统是由一组卫星和接收器组成的,工作原理是通过测量接收器和卫星之间的距离来确定接收器的位置。
然而,由于地面建筑物和天气条件的限制,GPS的定位精度可能受到一定的影响。
特别是在高楼大厦聚集的城市地区,建筑物会遮挡卫星信号,导致定位误差增加。
此外,恶劣天气条件如大雨、大雪等也会对GPS信号产生干扰,进一步降低了定位的准确性。
然而,惯性导航系统可以弥补GPS的不足之处。
INS由加速度计和陀螺仪等传感器组成,可以通过测量加速度和角速度来推断航向和位移。
与GPS不同,INS并不依赖于外部信号,因此不受天气和建筑物遮挡的影响。
然而,INS在使用时间越长,误差也会越来越大。
这是由于惯性传感器的漂移问题导致的。
因此,INS的定位结果并不是完全可靠的。
为了充分利用GPS和INS的优势,研究人员提出了一种组合定位方法,即将两者的定位结果进行融合。
这种方法通过使用卡尔曼滤波(Kalman Filter)算法来整合GPS和INS的信息。
卡尔曼滤波是一种数学算法,能够根据系统的动态模型和不确定性信息,进行估计和修正。
在组合定位中,卡尔曼滤波可以将GPS和INS的定位结果进行加权融合,从而得到更精确的定位值。
组合定位的过程可以简单描述为以下几个步骤:首先,根据GPS接收器的测量值,计算出当前位置的估计值。
然后,根据INS的测量值,根据运动方程和初始条件推断位置和速度的改变量。
接着,根据两种传感器的测量精度和不确定性信息,使用卡尔曼滤波算法来融合GPS和INS的定位结果。

GNSS和InSAR组合监测系统设计一、引言GNSS(全球导航卫星系统)和InSAR(干涉合成孔径雷达)被广泛应用于地球表面形变监测和地质灾害预警领域。
GNSS可以精确测量地表水平位移,而InSAR可以提供地表垂直位移的高分辨率图像。
将两种技术结合使用可以提高地质灾害监测的准确性和可靠性。
设计一种集成GNSS和InSAR的组合监测系统是非常重要的。
本文将首先介绍GNSS和InSAR技术的原理和特点,然后提出一种基于这两种技术的组合监测系统的设计方案,并讨论其实现过程和应用前景。
二、GNSS和InSAR技术概述1. GNSS技术GNSS是由多颗卫星组成的全球导航卫星系统,包括美国的GPS、俄罗斯的GLONASS、欧盟的Galileo和中国的北斗系统。
GNSS技术通过接收卫星发射的信号,利用测量卫星和地面接收机之间的距离和位置关系,来确定接收机的位置和速度。
GNSS技术具有全球覆盖、高精度和实时性的优势,被广泛应用于航空、航海、车辆导航和地质监测等领域。
2. InSAR技术InSAR是一种利用雷达干涉技术进行地表形变监测的方法。
它通过比较两幅或多幅雷达合成孔径雷达图像的相位差,可以实现地表垂直位移的测量。
相对于传统的地质监测方法,InSAR具有高分辨率、全天候和大范围监测的优势,被广泛应用于地质灾害预警和城市地质勘察等领域。
GNSS和InSAR两种技术各自具有独特的优势,但也存在一些局限性。
GNSS技术受大气和多路径效应影响,精度和稳定性受限;InSAR技术受地形、植被和建筑物的遮挡影响,不适用于某些区域。
基于这些考虑,设计一种集成GNSS和InSAR的组合监测系统是一种有效的解决方案。
组合监测系统的设计需要考虑到以下几个方面的问题:1. 数据融合与一体化处理:将GNSS和InSAR获取的数据进行融合与一体化处理,可以提高监测结果的一致性和可信度。
这需要设计相应的数据融合算法和一体化处理方法。
2. 监测网络规划与布设:合理规划和布设GNSS和InSAR监测网络,可以最大限度地提高监测区域的覆盖率和分辨率。


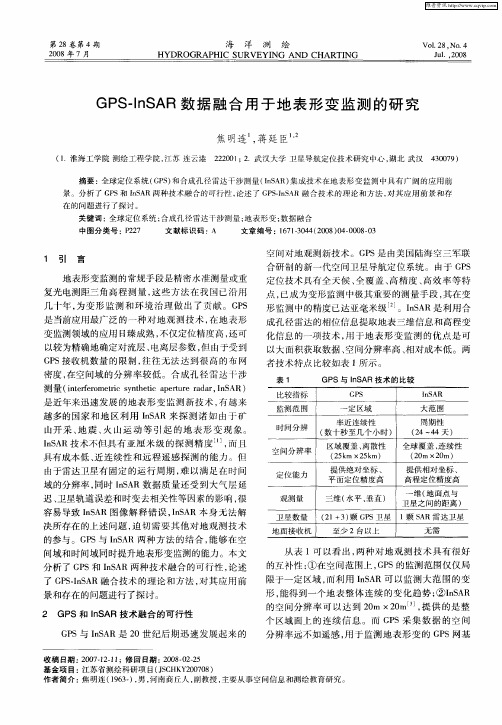
GPS/InSAR摘要:文章探讨了由和GPS/ InSAR 数据融合的组合系统,通过对合成孔径雷达干涉测量GPS和(InSAR)原理的描述,及对两者数据融合的分析,对其在变形监测中的应用前景作了探讨。
关键词:沉陷滑坡监测数据融合0前言全球卫星定位系统GPS( G lobal Posit ioning System)的英文名称为/ N av igat ion Sate llite T im ing A ndRang ing /G loba l Position ing System0, 即/ 卫星测时测距导航/全球定位系统0, 简称GPS系统。
它是以卫星为基础的无线电导航定位系统, 具有全能性(陆地、海洋、航空和航天)、全球性、全天候、连续性和实时性的导航、定位和定时的功能。
能为各种用户提供精确的三维坐标、速度和时间。
InSAR 根据复雷达图像信息的相位差信息,利用传感器高度、雷达波长、波束视向及天线基线距之间的几何关系,通过影像处理和几何转换来提取地面目标区地形的三维信息。
其特点是主动式遥感,全天候成像,空间分辨率高,覆盖范围大。
GPS 用于变形监测的作业方法主要有经典静态测量方法和动态测量方法。
GPS 和InSAR 技术的融合将在变形监测中具有广阔的应用前景。
1 系统简介GPS 即全球卫星定位系统( Global PositioningSystem) 是美国国防部研制发展的以卫星为基础的新一代导航定位系统。
该系统能满足军事部门和民用部门对连续实时定位以及三维导航的迫切要求,于1995 年4 月建成并投入使用。
GPS 是一种高精度的对地观测技术, 能较精确地确定电离层、对流层参数, 具有非常好的定位精度和时间分辨率。
GPS 主要由三部分构成: ①空间部分,由21 颗工作卫星和3 颗备用卫星组成,分布在20200 km 高的6 个轨道平面上;②地面监控分,由主控站、监测站、注入站、通讯及辅助系统组成; ③用户部分,由GPS 接收机、天线单元、接收单元组成。
GNSS与InSAR地面形变监测深度融合GNSS与InSAR地面形变监测深度融合地面形变的监测对于理解地壳运动、地下水资源管理以及地震前兆等具有重要意义。
全球导航卫星系统(GNSS)和合成孔径雷达干涉(InSAR)是常用的地面形变监测技术,它们各自有其优势和劣势。
将GNSS和InSAR技术深度融合,可以充分发挥两者的优势,提高地面形变监测的精度和空间分辨率。
GNSS是一种通过卫星定位测量地面物体位置和速度的技术。
它利用一组全球分布的卫星,接收地面接收器上的信号,并根据信号的传输时间和卫星位置计算出接收器的位置和速度。
GNSS技术具有高精度、高可靠性和全球覆盖的优势,可以精确测量地球表面的水平和垂直位移。
然而,GNSS技术对于地面的遮挡和信号多路径效应敏感,而且无法提供地面形变的空间分辨率。
InSAR技术是利用合成孔径雷达传感器获取的雷达干涉相位图来测量地面形变的技术。
InSAR技术利用两次或多次雷达图像的干涉相位差来推断地面的形变情况。
InSAR技术具有非接触式监测、高空间分辨率和全天候能力的优势。
然而,InSAR技术受大气条件、植被覆盖和地物表面变化等因素的影响较大,还存在相位漂移和不连续现象,造成形变监测的精度和准确性降低。
将GNSS和InSAR技术深度融合可以弥补各自的不足,并提高地面形变监测的精度和空间分辨率。
首先,利用GNSS技术可以提供地面形变的连续监测。
GNSS技术可以提供高精度的绝对坐标,用于校正InSAR技术中的相位漂移。
其次,利用InSAR技术可以提供高空间分辨率的地面形变监测结果。
InSAR技术可以提供大范围地面形变的空间分布情况,用于揭示地壳运动的细节。
GNSS与InSAR技术的深度融合涉及数据预处理、模型约束和结果解释等方面。
在数据预处理阶段,需要对GNSS和InSAR数据进行配准和去除误差。
在模型约束阶段,可以利用地质和地球物理模型对地面形变进行约束,提高形变监测结果的准确性。
导航与制导原理实验报告一.实验要求1.完成INS与GPS位置组合导航的仿真;2.画出组合导航后的位置误差、速度误差曲线;3.画出原始轨迹与组合导航后的轨迹比较图;(画图时弧度制单位要转换成度分秒制单位)4.结果分析5.提交纸版实验报告(附上代码)二.全局变量R=6378160; %地球半径(长半轴)f=1/298.3; %地球扁率wie=7.2921151467e-5; %地球自转角速率g0=9.7803267714; %重力加速度基础值deg=π/180; %角度min=deg/60; %角分sec=min/60; %角秒hur=3600; %小时dph=deg/hur; %度/时ts=0.1; %仿真采样时间三.组合导航仿真变量GPS_Sample_Rate=10; %GPS采样时间Runs=10; %由于随机误差,使用Kalman滤波时,应多次滤波,以求平均值Tg = 3600; %陀螺仪Markov过程相关时间Ta = 1800; %加速度计Markov过程相关时间四.Kalman Filter:估计状态初始值:Xk = zeros(18,1);估计协方差初始值:Pk=diag([min,min,min,0.5,0.5,0.5,30/Re,30/Re,30, 0.1*dph, 0.1*dph, 0.1*dph, 0.1*dph,0.1*dph, 0.1*dph, 1.e-3,1.e-3,1.e-3].^2); %18*18矩阵系统噪声方差:Qk=1e-6*diag([0.01,0.01,0.01,0.01,0.01,0.01,0.9780,0.9780,0.9780]).^2量测噪声方差:Rk=diag([1e-5,1e-5,10.3986]).^2系数矩阵 F, G, H 的表示,参考课件 6.2.1。
五.可能用到的公式(1)四元数Q的即时修正(符号⨂表示四元数乘法)式中nb nbx nby nbz 0Tbb b b ⎡⎤ω=ωωω⎦⎣为向量扩展四元数,标量部分为0。
GPSSINS超紧组合导航系统关键技术研究的开题报告开题报告:GPSSINS超紧组合导航系统关键技术研究一、研究背景及意义目前,全球定位系统(GPS)和惯性导航系统(INS)已广泛应用于航空、航天和军事领域。
GPS具有高精度、全球覆盖、持续跟踪等优点,但在信号被干扰或无法接收的情况下会失效。
INS具有无信号依赖、实时性好等优点,但存在误差累积、漂移等问题。
因此,将GPS和INS组合起来,可以充分发挥各自的优点,实现高精度、可靠性强的导航系统。
在复杂电子环境下,GPS和INS的组合导航系统仍然存在一定的误差,无法满足高精度导航的需求。
超紧组合导航系统是GPS和INS组合导航的一种新型技术,可以利用多传感器数据进行动态校正和误差补偿,达到更高的精度和可靠性,具有重要的应用前景。
二、研究内容和方法本课题旨在研究GPSSINS超紧组合导航系统的关键技术,包括以下内容:1. 基于多传感器数据的超紧组合导航系统算法研究;2. 航空、航天、地面等应用场景下的超紧组合导航系统性能分析;3. 超紧组合导航系统误差补偿和动态校准算法研究;4. GPSSINS超紧组合导航系统软件平台设计与实现。
研究方法主要包括以下几个方面:1. 分析目前超紧组合导航系统的研究现状、存在问题和发展趋势;2. 研究多传感器数据融合算法、误差补偿和动态校准算法;3. 基于虚拟仿真技术进行航空、航天、地面等应用场景下的性能分析;4. 设计GPSSINS超紧组合导航系统软件平台,进行实验验证。
三、预期成果和意义本课题的研究成果预期包括:1. GPSSINS超紧组合导航系统关键技术研究报告;2. 多传感器数据融合算法、误差补偿和动态校准算法;3. GPSSINS超紧组合导航系统软件平台原型系统。
本课题的研究成果将对航空、航天、军事等领域的高精度、可靠性强的导航系统的研究和应用具有重要意义。
同时,本研究也将推动组合导航技术的发展,为国家重大工程的研究和应用提供技术支撑。
第28卷特刊武汉大学学报・信息科学版Vol.28Special Issue 2003年5月G eomatics and Information Science of Wuhan University May2003文章编号:1671-8860(2003)Z3-0058-04文献标识码:A GPS与INSAR数据融合研究展望许才军1 王 华1 黄劲松1(1 武汉大学测绘学院,武汉市珞喻路129号,430079)摘 要:分析了GPS与INSAR数据融合的必要性与可行性,讨论了GPS与INSAR数据融合存在的主要问题,进一步探讨了利用GPS数据改善INSAR相位解缠算法,利用GPS与INSAR数据融合建立水汽模型和大气层延迟误差改正模型,以及GPS高时间分辨率和高平面位置精度与INSAR高空间分辨率和高高程变形精度有效统一的问题。
关键词:GPS;INSAR;误差改正;数据融合中图法分类号:P228.411 GPS与INSAR数据融合的可行性 合成孔径雷达干涉测量技术(简称INSAR)最早应用于金星雷达回波模糊度的消除[1],后来应用于月球地形图的绘制[2]。
Graham于1974年首次将INSAR引入地形制图,并首次利用IN2 SAR绘出了与地形图相应的等值线[3]。
INSAR 理论成熟于20世纪80年代,为了满足SAR图像相干性条件,Zebker和G oldstein首次应用交叉轨道干涉测量模式绘制出地形图[4]。
G oldstein和Zebker应用平行轨道干涉测量模式获取了旧金山海湾地区的潮汐移动图像[5]。
重复轨道干涉测量模式最早于1987年被Li和G oldstein采用,特别是随着星载雷达技术的发展,重复轨道模式显示了广阔的应用前景。
INSAR早期主要应用于三维地形图的生成,G abriel等首先应用差分INSAR技术(简称DINSAR)获取了cm级精度的地表形变信息,显示了DINSAR在形变监测中的优越性,从而引起了人们更加广泛的关注[6]。
1991年,欧洲遥感卫星ERS-1的发射使得IN2 SAR开始蓬勃发展(Li and G oldstein,1990;Coul2 son,1993);1995年ERS-2卫星的发射掀起了雷达遥感的热潮,利用ERS-1和ERS-2获取的图像组合,可以得到采样周期为1d的INSAR图像数据。
2000年2月11日美国“奋进号”航天飞机全球雷达测绘的成功,更是引起了广泛关注,它仅用了11d就完成了一次飞行,获取了覆盖全球陆地表面80%面积的三维地形图,充分展示了INSAR 全球快速测图的能力。
INSAR是一种极具潜力的新型空间大地测量方法,但它也有其固有的限制,特别是受到大气层延迟(对流层延迟、电离层延迟等)、卫星轨道误差、地表状况和时变去相关性等影响,很容易导致INSAR图像解释错误,而INSAR数据本身无法解决所存在的上述问题。
而GPS可以精密定位,可以较为精确地确定电离层、对流层参数,是当前应用最广泛的一种空间大地测量手段。
比较IN2 SAR与GPS两种技术,可知两者具有很好的互补性:①GPS是一种理想的点定位系统,尤其是采用相对定位工作方式时,定位精度达10-8~10-9,但是GPS的空间分辨率较低,用于监测地表形变的GPS网基线长度至少有几十至几百km,不足以满足高空间分辨率形变监测的需求。
而INSAR提供的是整个区域面上的连续信息,其空间分辨率甚至可以达到20m×20m。
②GPS获得的是高精度的绝对坐标,而INSAR仅提供相对坐标。
③由于入射角的关系,INSAR对高程信息特别敏感,尤其是利用DINSAR进行形变监测, 收稿日期:2003-03-25。
项目来源:湖北省青年杰出人才基金资助项目(2002AC011);地球空间环境与大地测量教育部重点实验室开放研究基金(测绘基础研究)资助项目(02-09-06)及武汉大学创新基金资助项目。
精度可达亚cm级,而这恰恰是GPS最薄弱的一环。
④最重要的是,GPS允许长时间连续观测,而INSAR可被看作瞬时观测,而且容易受时变去相关的影响,两幅图像获取时间间隔不能太长; GPS可提供时间分辨率很高的观测数据(采样率为10Hz乃至20Hz),而SAR卫星通常35d左右的重复周期(ERS-1和ERS-2共同服役期间,重复周期为1d)很难提供足够的时间分辨率。
GPS与INSAR数据融合既可以改正INSAR 数据本身难以消除的误差,又可以实现GPS技术高时间分辨率和高平面位置精度与INSAR技术高空间分辨率和高高程变形精度的有效统一。
2 GPS与INSAR数据融合存在的主要问题 1997年,Bock&Williams[7]首先提出IN2 SAR与GPS融合的思想;同年,Linlin G e等人(1997,1999,2000a,2000b)进一步提出了DIDP (double interpolation and double prediction)方法,即利用GPS数据减弱大气层延迟影响(对流层延迟、电离层延迟等)和卫星轨道误差,并通过改正后的INSAR图像去加密GPS观测结果,在时间域内拟合GPS数据,在空间域内拟合INSAR数据,从而实现高精度、高时空分辨率的形变监测。
2000年,Sverrir Guemundsson结合GPS与IN2 SAR数据,应用马尔可夫随机模型和模拟退火法进行干涉图像相位解缠,并初步实现了INSAR与GPS数据的融合,得出了高空间分辨率的三维地壳变形场[8]。
Hoeven等分别采用了内插GPS网中获取的数据和GPS时间序列两种方法建立对流层延迟改正模型来改善INSAR数据,并对这两种方法作了比较与分析[9]。
目前,利用INSAR可以获取高分辨率(20m ×20m)、高精度(可达6m)的数字高程模型(DEM)(Bamler等,1998;Werner等,1993;Adam 等,1999;Jordan等,1996)。
利用DINSAR可以探测高分辨率(20m×20m)、高精度(可达亚cm 级)的地表形变信息,自1989年,G abriel等(1989)将DINSAR应用于监测地表移动至今, DINSAR已被用于多例地震[11~13]、火山活动的形变(Mouginis-Mark等,1993;Briole等,1997; Thatcher,Massonnet,1997;G addis等,1998)、冰川冰盖移动(G oldstein等,1993;Gray等,1999)、热带雨林监测(Wegmuller,Werner,1995)、滑坡监测(Fruneau等,1996)及地表沉降观测(Rosen等,1997;Usai,1997;Usai,Hanssan,1997;Hassen,Us2 ai,1997;Usai,K lees,1998,1999a,1999b;Ferretti 等,1998,1999b,2000)等。
利用INSAR或IN2 SAR与GPS、VLB I、雷达高度计、气象科学等集成进行大气层研究,是当前国际研究的一个热点。
Hanssen等(1999,2000b,2001,2002)在这方面做了大量的研究工作,并初步得出了利用INSAR研究水汽的模型[15]。
INSAR作为一种监测手段,也有其固有的限制,其数据质量主要受到SAR卫星轨道误差、系统热噪声去相关、多普勒质心去相关、空间基线去相关、地面散射去相关、时变去相关、大气层延迟误差、地形畸变、数据处理过程噪声等因素影响。
欧空局发射的ERS-1和ERS-2卫星从荷兰Delft 大学空间对地观测研究组(DEOS)获取精密星历减小轨道误差(Fernandes,1993;Seeber,1993; Scharroo,Visser,1998),其他SAR卫星系统的轨道星历精度稍低。
对于某一特定的系统,系统热噪声对相位的影响可以通过信噪比值(SNR)来确定[16,17]。
由于卫星和地面点的相对运动,雷达发射的微波信号会产生多普勒频移,多普勒质心去相关是由于INSAR两次获取图像时多普勒质心不同引起的,对于ESR-1和ESR-2组合得到的干涉图像,多普勒质心去相关的影响非常明显(Swart,2000)。
多普勒去相关一般可以通过方位向滤波消除。
INSAR两次获取图像时,如果地面散射特性发生了变化会导致地面散射去相关,Ze2 bker和Villasenor首先给出了散射去相关对地面变形量影响的关系式[16]。
INSAR两次获取地面图像时,天线倾角的不同可能导致空间基线去相关(G atelli等,1994),当垂直基线超过一定的限制时,甚至会导致两幅图像完全去相关,目前一般依据基线长度选择合适的干涉像对来消除基线去相关的影响。
数据处理过程中,噪声主要是由数据处理所采用的计算机系统字长限制和算法产生的,如不同插值方法、不同的相位解缠算法等都会对结果产生很大的影响[18]。
时变去相关主要是由于INSAR两次获取图像时地表覆盖物的属性变化引起的,特别是进行长期地表形变监测,必须考虑时变去相关的影响(Hoen,Zebker,2000)。
INSAR时间序列数据库方法[19]和永久性散射方法[20]是削弱时变去相关影响所采用的两种新方法。
随时间和空间变化,大气层分布的不均匀性会导致大气层延迟误差(Tarayre,Massonnet, 1994,1996)。
由于大气层分布的复杂性,特别是对流层延迟湿分量的不确定性,大气层延迟误差95特刊 许才军等:GPS与INSAR数据融合研究展望 很难精确确定。
目前,减弱大气层延迟误差主要采用的方法包括利用INSAR图像建立水汽模型(G oldstein,1995;Zebker等,1997)[15,18]和利用GPS数据计算的大气层延迟误差(Hoeven等, 2000;Tarayre,Massonnet,1996;Linlin G e,1997)对INSAR数据进行改正。
从上面的分析可知,GPS与INSAR数据融合还存在以下主要问题。
目前的研究都只偏重INSAR数据中某一误差利用GPS数据进行改正,而没有一套完整的GPS与INSAR数据融合的理论、方法;相位解缠算法对INSAR产品的精度影响很大,但目前研究都没有提供完善的解缠算法;建立大气层延迟误差模型,目前研究都只应用了GPS数据,而没有用到INSAR数据。
虽然GPS数据能建立高精度的大气层延迟模型,然而它却只能提供点信息,模型中空间插值技术的引入无疑又会导致数据精度降低;利用GPS数据拟合地表形变场时,插值算法中需要同时顾及地壳运动,并且还需要考虑GPS与INSAR数据融合的精度评定问题。
3 GPS与INSAR数据融合的展望GPS与INSAR数据融合可以进行以下几方面的研究工作。