无刷直流电机中霍尔元件的空间配置_王萍
- 格式:pdf
- 大小:108.62 KB
- 文档页数:3
无刷直流电机控制的优化仿真及实现魏海峰;李萍萍;贾洪平【期刊名称】《中国农村水利水电》【年(卷),期】2009()9【摘要】为使系统模型更接近物理实际并易于仿真实现,提出一种新颖的无刷直流电机转速、电流双闭环控制系统建模仿真方案。
无刷直流电机导通运行过程中,定子绕组端点电压受电机内部状态和逆变器状态的多个因素综合影响。
而Matlab SimPowerSystem Toolbox三相全桥逆变器模块的输出电压,与电机内部物理量无关,不适用于无刷直流电机导通方式的建模。
在对电机和逆变器工作过程分析基础上,编写S函数对逆变器和直流母线电流建模,并将仿真结果与系统实验结果进行对比验证,证明该仿真方法的正确性。
提出一种低成本的直流母线电阻电流采样方案,在不增加硬件成本前提下,仅利用一个采样电阻便可实现力矩电流的较精确检测。
该方案能有效提高系统的控制精度。
【总页数】3页(P141-143)【关键词】无刷直流电机;仿真建模;电磁转矩;逆变器;电流采样【作者】魏海峰;李萍萍;贾洪平【作者单位】江苏大学现代农业装备与技术省部共建教育部重点实验室;江苏大学电气信息工程学院【正文语种】中文【中图分类】TM301.2【相关文献】1.无位置传感器无刷直流电机控制系统仿真研究 [J], 吴鹏坤;贾琴妹2.基于PSoC的无位置传感器无刷直流电机控制器的设计与实现 [J], 尚君;冯明旭3.无位置传感器无刷直流电机控制系统仿真 [J], 谭锦荣;曾岳南4.盘式无铁心无刷直流电机控制系统仿真研究 [J], 王晓远;梁广;王晓光5.高速无位置无刷直流电机控制系统的精确换相仿真研究 [J], 易佩华;陈卫兵;钟德刚因版权原因,仅展示原文概要,查看原文内容请购买。
[自控・检测]收稿日期:2007-01-18基金项目:安徽农业大学校青年基金项目(200500012)作者简介:李 兵(1971-),男,安徽明光人,硕士,讲师,现在安徽农业大学工作,主要从事农业机械化及自动化方面研究。
基于MC 3305芯片的电动车无刷直流电机闭环控制器李 兵 (安徽农业大学工学院,安徽合肥 230036) 摘 要:国内电动车无刷直流电机控制器大都采用分立元件,使得控制系统的设计调试复杂。
介绍了M oto ro la 公司的第2代直流无刷电机控制器专用芯片M C 33035的基本原理,设计了一种基于MC 33035,MC 33039,MPM 3003的电动车闭环无刷电机控制器,介绍了具体参数。
所设计的电路抗干扰性强,可靠性高,稳定性好,可内嵌到电机内部。
关 键 词:无刷直流电机;闭环控制器;M C33035芯片中图分类号:T P 271;V 484 文献标志码:A 文章编号:1005-2895(2007)05-0061-030 引 言近年来,由于石油能源的日益紧张及人们环境保护意识的增强,电动助力车深受欢迎。
永磁直流无刷电机驱动成为电动车的发展方向。
它由定子、转子和转子位置检测元件霍尔传感器等组成,既具备交流电机的结构简单、运行可靠、维护方便等优点,又具备了直流电机运行效率高,调速性能好等优点,在电动车等电器设备中得到广泛应用。
目前,国内电动车无刷直流电机控制器设计大都采用分立元件,使得控制系统的设计和调试复杂。
要占用较大的电路板,与把控制器内嵌到电机内部的要求相矛盾[1]。
M C33035是M otorola 公司的第二代直流无刷电机控制器专用芯片,M C 33039是M otorola 公司生产的直流无刷电机控制器闭环速度控制专用芯片,MPM 3003是Mo torola 公司生产的电机驱动芯片,输出最高峰值电流高达25A 。
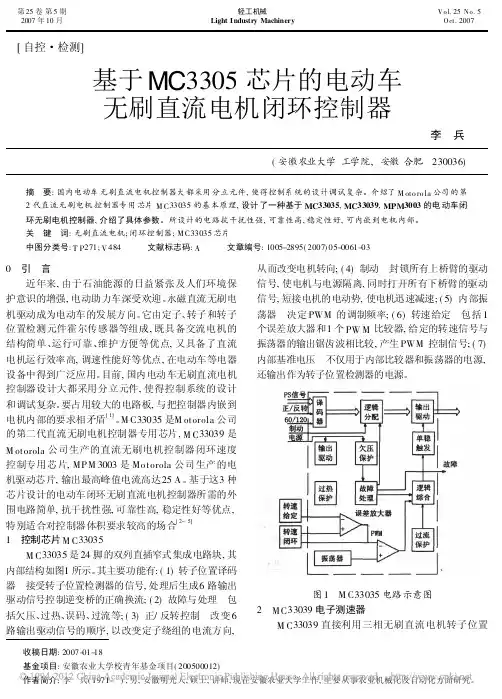
基于这3种芯片设计的电动车闭环无刷直流电机控制器所需的外围电路简单,抗干扰性强,可靠性高,稳定性好等优点,特别适合对控制器体积要求较高的场合[2-5]1 控制芯片M C 33035M C 33035是24脚的双列直插窄式集成电路块,其内部结构如图1所示。
无刷直流电机中霍尔传感器空间安放位置研究0 引言霍尔位置传感器在无刷直流电机中起着检测转子磁极位置的作用,为逻辑开关电路提供的换向信息,即将转子磁钢磁极的位置信号转换成电信号,然后去控制定子绕组的换向导通[1]。
初步实验结果表明,电枢反应和位置传感器的改变对霍尔检测信号影响较大,直接影响了电机绕组的换流,引起电机力矩波动从而带来噪音。
文中针对引起霍尔传感器位置检测误差的主要因素进行了分析,并且通过对样机电机的三维有限元仿真计算,得到了霍尔传感器检测漏磁场的分布,为霍尔传感器的安放位置提供了依据。
1 霍尔安放位置问题1.1 产生霍尔传感器位置检测误差的因素产生霍尔传感器位置检测误差的因素主要有以下两方面:①霍尔传感器的参数;②传感器安装位置处的磁场变化[2]。
①磁密滞环宽度开关型霍尔元件只有在检测到磁场到达某一数值时,霍尔开关接通;而磁感应强度降低到某一数值以下,霍尔开关断开,因此输出信号的过零点与磁密过零点并不重合。
而这些事件的触法点叫吸合点和释放点。
开关型产品一般都给出吸合点和释放点的最大和最小磁感应强度,保证在最大吸合点和最小释放点所有开关接通或断开,但某一开关可能在这两个极限值之内吸合或释放。
虽然某些产品不给出某一元件在两极限值之内的具体切换点,但保证有最小滞环,这一特性使得输出信号不会因为输入信号的微小波动而发生错误的跳变,以防抖动。
实际应用中霍尔传感器的输出信号与绕组反电势之间期望的相位关系只能在一个方向上实现[3]。
在另一个方向上将出现位置检测误差,如位置误差值为磁密滞环宽度,等于二倍的磁密门槛值;式中s 是从0 到D 值之间磁密随转子转角的平均变化率。
如果传感器敏感的磁密按幅值为0.3T 的正弦函数变化,霍尔传感器的门槛值为0.01mT,则在一个电周期内位置误差为θ = arcsin(2*0.01/0.3)=3.85° 。
由式(1)可知,霍尔检测位置误差值可以通过选择滞环宽度小的霍尔传感器或者通过合理的计算安装位置处的磁密来选择合适的安装位置以获得高的磁密的变化率来进行抑制。
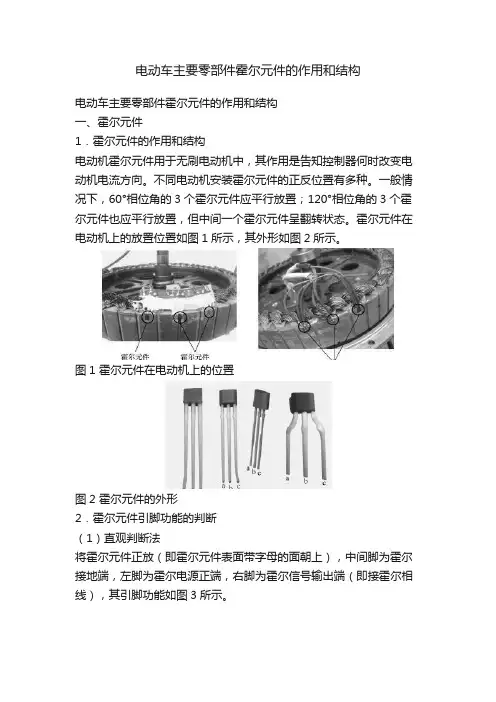
电动车主要零部件霍尔元件的作用和结构电动车主要零部件霍尔元件的作用和结构一、霍尔元件1.霍尔元件的作用和结构电动机霍尔元件用于无刷电动机中,其作用是告知控制器何时改变电动机电流方向。
不同电动机安装霍尔元件的正反位置有多种。
一般情况下,60°相位角的3个霍尔元件应平行放置;120°相位角的3个霍尔元件也应平行放置,但中间一个霍尔元件呈翻转状态。
霍尔元件在电动机上的放置位置如图1所示,其外形如图2所示。
图1 霍尔元件在电动机上的位置图2 霍尔元件的外形2.霍尔元件引脚功能的判断(1)直观判断法将霍尔元件正放(即霍尔元件表面带字母的面朝上),中间脚为霍尔接地端,左脚为霍尔电源正端,右脚为霍尔信号输出端(即接霍尔相线),其引脚功能如图3所示。
图3 霍尔元件的引脚功能(2)霍尔导线的颜色无刷电动机上与控制器相连的霍尔线有5根,一般黑色线接霍尔接地端,红色线接霍尔电源正端,其余的黄、蓝、绿线接霍尔信号输出端(即接霍尔相线),如图4所示。
图4 根据霍尔导线分辨霍尔元件引脚功能3.霍尔元件的测量霍尔元件的故障主要有霍尔元件脱落、霍尔集成电路失效、霍尔引线断开等。
当怀疑霍尔元件损坏时,应按以下方法进行测量。
方法一:通过测量霍尔相线电压来判断霍尔元件的好坏。
① 把电动机与控制器连接好,并接通电源,按图5所示方法测量霍尔电源电压。
选用数字式万用表的20V直流电压挡,让黑表笔接霍尔元件的黑色导线,红表笔接霍尔元件的红色电源线,即测霍尔元件的电源电压,一般为5V,但也有4.5V或6.25V的,实际测量时有可能偏小。
图5 霍尔电源线的测量② 在霍尔元件引线及连接无异常的情况下,可进行以下测量:若霍尔电源电压为5V,用万用表黑表笔接黑色线,红表笔接蓝色线(或黄色线、绿色线),用手慢慢转动后轮,万用表显示0V或5V为正常,有时略低于5V也为正常,测量方法如图6所示。
若长期处于高电位5V,或长期处于低电位0V,则表明蓝色线对应的霍尔元件损坏。
收稿日期:20010514 设计分析 无刷直流电动机的分数槽电枢绕组和霍尔元件的空间配置叶金虎(信息产业部电子第二十一研究所,上海200233)Fractional -slot Armature Windings and Hall Elements Placement for Brushless DC MotorYE J in -hu(Elec .No .21Research Institute under the Information Industry M inistry ,Shanghai 200233,China ) 摘 要:在描述分数槽绕组的基本概念的基础上,通过若干个例子,着重分析和说明分数槽绕组的连接方式和霍尔元件的空间配置的问题。
关键词:无刷直流电动机;分数槽;霍尔元件;电枢绕组中图分类号:TM 33 文献标识码:A 文章编号:1004-7018(2001)04-0008-04A bstract :By several examples ,on the basic of describing the basic concepts of the fractional -slot armature windings this pa -per emphasizes to analyse and to explain follow ing two problems :how to connect the fractional -slot armature w indings and how to place Hall elements .Keywords :brushless DC motor ;fractional -slo t ;Hall ele -ments ;armature winding近年来,无刷直流电动机广泛用于视听设备、计算机外部设备和情报信息机械等领域。
在这些领域内,无刷直流电动机大多采取多极薄饼式外转子结构,其电枢绕组大多采用分数槽型式的绕组。

无刷电机霍尔分布
一、无刷电机霍尔分布那点事儿
嘿,小伙伴们!今天咱们来唠唠无刷电机霍尔分布这个有趣的话题。
霍尔元件在无刷电机里可是相当重要的存在呢。
一般来说,无刷电机里的霍尔元件是按照一定规律分布的。
从位置上看,霍尔元件会分布在电机的定子上。
这是为啥呢?因为定子是不动的部分,把霍尔元件放在这儿,方便它去检测磁场的变化呀。
在数量上,常见的有3个霍尔元件的分布。
这3个霍尔元件可不是随便放的哦。
它们之间有着特定的角度关系,一般是间隔120度。
这种120度的分布呢,就像是三个小伙伴在定子这个大舞台上站好位置,各司其职。
每个霍尔元件就负责检测它周围那一块区域的磁场情况。
当电机转动的时候,磁场也跟着变,霍尔元件就能感知到这种变化,然后把信号传给控制器,这样电机就能乖乖按照我们想要的方式转动啦。
还有一些无刷电机可能会有6个霍尔元件的分布呢。
这6个霍尔元件的分布就更复杂一些啦。
它们可能是分成两组,每组3个,每组内部的3个霍尔元件也是间隔120度,但是两组之间又有着另外一种关系。
这种分布可以让电机的控制更加精细,就像是给电机装上了一个更高级的大脑,让它能做更多复杂的动作。
而且呀,霍尔元件的分布还和电机的相数有关系。
不同相数的
无刷电机,霍尔元件的分布也会有所不同。
比如说三相无刷电机和多相无刷电机,它们的霍尔元件分布就会根据相数的特点进行调整,这样才能保证电机正常运转。
无刷电机霍尔元件的分布可是个很有讲究的事儿呢,不同的分布方式都有着各自的特点和用途,这也正是无刷电机能在各种设备中发挥出色性能的小秘密之一哦。
41F电动车电机霍尔元件
【双极锁存霍尔/霍尔测速】
41F相关介绍
41F 的特点:
1: 微型封装:3.0mmx4.0mm ,速度和转速RPM传感
2: 工作电压范围:3.8V to 28V,使用温度-40°C to 150°C
3:低功耗:5mA max at 4.5Vdc
4:高灵敏度适用环形N/S交变磁场
5:高工作频率:0KHz-100KHz,内置电源反接保护
41F的应用
1: 电机和风扇控制
2: 高灵敏度适用环形N/S交变磁场
3: 转速表,计数器
4: 无刷直流电机换向,流量和流速传感
41F集成磁敏霍尔电压发生器,比较器,抗噪声施密特触发器,以及集电极开路输出电路。
SS41F 41F内部电源调整器为片内电路提供带温度补偿稳定电源,满足宽泛的工作电压范围要求。
SS41F 41F增强型双极锁存霍尔位置传感器集成了多个功能块于一个小封装内的霍尔效应器件,能可靠工作于永磁场或电磁场,特别适合N/S交变磁场感应。
规格型号:双极锁存型
封装:TO-92
41F是开关量位置传感器
SS41F 41F特性:SS41F 41F是集成霍尔效应销存性传感器,用于无刷直流电机换向位置检测,速度脉冲信号检测,位置信号检测等.耐压60V,环境温度-40-150度.高灵敏度.
外形尺寸图。

BLDC电机控制算法无刷电机属于自換流型(自我方向轉換),因此控制起来更加复杂。
BLDC电机控制要求了解电机进行整流转向的转子位置和机制。
对于闭环速度控制,有两个附加要求,即对于转子速度/或电机电流以及PWM信号进行测量,以控制电机速度功率。
BLDC电机可以根据应用要求采用边排列或中心排列PWM信号。
大多数应用仅要求速度变化操作,将采用6个独立的边排列PWM信号。
这就提供了最高的分辨率。
如果应用要求服务器定位、能耗制动或动力倒转,推荐使用补充的中心排列PWM信号。
为了感应转子位置,BLDC电机采用霍尔效应传感器来提供绝对定位感应。
这就导致了更多线的使用和更高的成本。
无传感器BLDC控制省去了对于霍尔传感器的需要,而是采用电机的反电动势(电动势)来预测转子位置。
无传感器控制对于像风扇和泵这样的低成本变速应用至关重要。
在采有BLDC电机时,冰箱和空调压缩机也需要无传感器控制。
死区的插入和补充许多不同的控制算法都被用以提供对于BLDC电机的控制。
典型地,将功率晶体管用作线性稳压器来控制电机电压。
当驱动高功率电机时,这种方法并不实用。
高功率电机必须采用PWM控制,并要求一个微控制器来提供起动和控制功能。
控制算法必须提供下列三项功能:用于控制电机速度的PWM电压用于对电机进整流换向的机制利用反电动势或霍尔传感器来预测转子位置的方法脉冲宽度调制仅用于将可变电压应用到电机绕组。
有效电压与PWM占空度成正比。
当得到适当的整流换向时,BLDC的扭矩速度特性与一下直流电机相同。
可以用可变电压来控制电机的速度和可变转矩。
功率晶体管的换向实现了定子中的适当绕组,可根据转子位置生成最佳的转矩。
在一个BLDC电机中,MCU必须知道转子的位置并能够在恰当的时间进行整流换向。
BLDC电机的梯形整流换向对于直流无刷电机的最简单的方法之一是采用所谓的梯形整流换向。
在这个原理图中,每一次要通过一对电机终端来控制电流,而第三个电机终端总是与电源电子性断开。
![一种无刷电机驱动电路的霍尔元件位置检测电路[发明专利]](https://uimg.taocdn.com/3005d99bf242336c1fb95e10.webp)
专利名称:一种无刷电机驱动电路的霍尔元件位置检测电路专利类型:发明专利
发明人:王丹丹,王乐平,夏运明,涂聚友
申请号:CN201511016257.7
申请日:20151229
公开号:CN105553349A
公开日:
20160504
专利内容由知识产权出版社提供
摘要:本发明公开了一种无刷电机驱动电路的霍尔元件位置检测电路,包括主控芯片和配合的霍尔元件以及电阻和电容等元件。
本发明通过反向电动势来检测电机位置,比霍尔检测方式更精准,能最大发挥驱动板的效率,由于启动之前已通过霍尔检测到电机位置,因此可以做到电机启动过程平滑,不抖动、不反转,容易生产及装配,对霍尔元件的装配位置要求比较宽松,不会因为霍尔位置偏差造成电机工作效率低下等问题。
申请人:合肥龙多电子科技有限公司
地址:231600 安徽省合肥市肥东县新城开发区
国籍:CN
代理机构:安徽合肥华信知识产权代理有限公司
代理人:余成俊
更多信息请下载全文后查看。