霍尔位置传感器在无刷直流电机中的应用
- 格式:docx
- 大小:466.32 KB
- 文档页数:45
无刷电机控制器霍尔信号的隔离摘要:无刷电机控制器中的霍尔传感器信号是控制电机转速和位置的重要参考信号,而对这些信号进行正确的隔离处理可以提高电机控制系统的稳定性和可靠性。
本文通过对无刷电机和霍尔传感器的工作原理进行介绍,分析了霍尔信号隔离的原理、方法和技术方案,并在实际应用中进行了验证,结果表明隔离处理对电机控制系统具有良好的影响。
关键词:无刷电机;霍尔传感器;隔离;控制器;稳定性1.引言无刷电机由于其高效率、高可靠性和低噪音等优点,已广泛应用于工业生产和消费电子设备中。
而在无刷电机控制系统中,霍尔传感器信号则是控制电机转速和位置的重要依据。
然而,信号在传输过程中可能会受到干扰,严重影响了系统的稳定性和可靠性。
因此,对霍尔信号进行隔离处理成为了十分重要的技术问题。
2.无刷电机和霍尔传感器的工作原理无刷电机是一种采用三相交流电或直流电进行驱动的电机,其主要由定子和转子两部分组成。
与传统的有刷直流电机不同的是,无刷电机的转子上没有碳刷,而是通过内置的霍尔传感器来对转子位置进行检测,从而实现对电机的控制。
霍尔传感器是通过检测磁场的变化来确定转子位置的装置,一般分为单路、双路和三路三种类型。
3.霍尔信号隔离的原理霍尔传感器的信号在传输过程中可能会受到外部电磁干扰的影响,因此需要对其进行隔离处理。
隔离的目的是使输入信号和输出信号之间没有电流通路,从而避免了信号之间相互影响的可能。
在无刷电机控制系统中,霍尔信号的隔离处理通常采用光耦隔离器或者磁隔离器来实现。
4.隔离方法和技术方案4.1 光耦隔离器的原理和应用光耦隔离器是一种利用光电转换原理实现信号隔离的设备,其主要由发光二极管、光电三极管、光电耦合器和输出级等组成。
在无刷电机控制系统中,可以通过将霍尔传感器信号输入到发光二极管端来实现信号的隔离,其原理是当输入信号电压到达一定阈值时,发光二极管会发出光信号,光信号经由光电耦合器后转化为输出电压,从而实现了信号的隔离。
无刷直流电机无霍尔控制方法无刷直流电机,这个名字听上去就很高大上,对吧?其实它的工作原理可简单得很。
咱们今天就来聊聊这种电机的无霍尔控制方法,让大家轻松理解,不再觉得复杂。
咱得知道,无刷电机相较于有刷电机来说,它可是没有那些小刷子的。
没有刷子,意味着没有摩擦,哎,这可是省去了不少麻烦啊!想想刷子磨损、维护,光是这一点就能让不少小伙伴感到头疼。
无刷电机靠电子控制来实现转动,听起来是不是很炫酷?不过,光说不练,咱们还是得深入点。
无霍尔控制,听上去也许有点抽象,其实就是用另一种方式来实现电机的转动。
这种方法有点像是用眼睛看路而不是用手去摸索。
霍尔传感器在无刷电机中主要用来监测电机的转子位置,但无霍尔控制却可以省略这一部件,咋一听,哇塞,省钱又省事。
咱们就像开车,不用导航也能找到路,嘿,这不是个好主意吗?如何实现这个无霍尔控制呢?其实就是通过反电动势来获取转子的位置。
你想想,电机在转动时,转子会产生反电动势,这个信号其实就像是电机在告诉你:“嘿,我在这里呢!”用这个信号来判断转子的位置,简单明了。
就好比你走路的时候,脚下的路面在告诉你哪里有坑,哪里是平坦,靠这点小聪明,咱们就能顺利前行。
再说说控制算法,咱们常用的有个叫“增量式控制”的方法。
听起来是不是很酷?这其实就像是在打游戏,咱们控制角色走路的时候,每一步都是根据当前的情况来调整的。
电机也是如此,实时根据反电动势的变化来调整电流,简直就像是在和电机跳舞,随时变换步伐,优雅而流畅。
当然了,咱们得注意控制参数的设置,稍微不小心,电机就可能“跳个舞”出错。
控制得当,电机运转顺畅,能耗降低,省电又环保,真是多赢的局面。
就像做菜,调味品放多了就变咸,放少了又没味儿,掌握好分寸才是王道。
有些朋友可能会问,这无霍尔控制是不是很麻烦呢?其实啊,很多人一开始觉得复杂,但只要上手试试,慢慢就能找到感觉。
就像学骑自行车,刚开始总是摔跤,但等你掌握了平衡,嘿,那感觉就妙不可言。
永磁无刷直流电机霍尔传感器故障诊断与容错运行新方法目前,针对无刷直流电机无法正常运行的情况已提出了基于振动和定子电流频谱分析的故障检测和诊断方法,同时也有霍尔传感器FTC方案。
本文提出在霍尔传感器发生故障的瞬间进行精确的诊断,并保证无刷直流电机持续稳定运行的方法。
根据霍爾信号的持续时间是否出现异常来判断是否出现霍尔传感器故障,同时,切断出现故障的霍尔传感器,采用正常工作霍尔传感器的信号预测故障霍尔传感器的信号,使无刷直流电机进行正常换相。
标签:永磁无刷直流电机;霍尔传感器故障诊断;容错控制;Simulink仿真引言:文章围绕一个霍尔传感器出现故障和两个霍尔传感器出现故障的情况进行了详细的分析和仿真,提出了一种霍尔传感器实时故障分析诊断与容错运行的方法。
本容错运行方法利用正常工作霍尔传感器高电平与低电平的时间计算,并模拟故障霍尔传感器高、低电平时间,在故障霍尔传感器电平不改变的情况下也可以使电机正确换相。
实验结果表明,通过正常工作的霍尔传感器可以较好地判断故障霍尔传感器电平变化的情况,进而控制晶体管的导通与关断,保证无刷直流电机的正常换相。
采用本文的容错方式运行可以保证无刷直流电机运行驱动系统在霍尔传感器故障的情况下可靠运行,对提高无刷直流电机驱动系统的可靠性具有重要的应用意义。
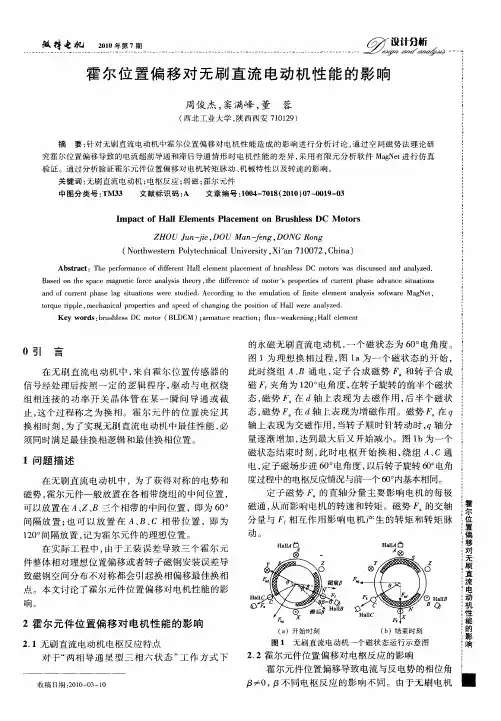
1 基于霍尔传感器的BLDC驱动系统基于霍尔传感器的永磁无刷直流电机(BLDC)驱动系统的基本结构,此结构由转速PI调节器、电流幅值限制模块、电流检测模块、电流PI调节器、PWM 及换相模块、位置检测模块、转速检测模块和永磁无刷直流电机组成。
无刷直流电机一般采用三相逆变器供电和两两导通的控制方式,需要三个霍尔传感器对电机转子位置进行实时检测,在一个电周期内提供六路换相信号实现电机换相。
三个霍尔传感器分别独立工作,在一个电周期内可发出相位相差120°的方波信号,用以确定转子位置,进而控制晶体管开断.2 霍尔传感器故障诊断及容错控制2.1 一路霍尔传感器出现故障当一路霍尔传感器出现故障时,可以分为三种情况:H1出现故障、H2出现故障、H3出现故障。
无刷电机控制技术的研究进展综述1前言随着科学技术和工业化的快速发展,工业自动化程度的日益加深,电机的应用领域不断的扩大。
电力电子技术、微机控制技术和控制理论的发展更加促进了电机调速技术的发展.随着新的电力电子器件,高性能的数字集成电路以及先进的控制理论的应用,控制部件功能日益完善,所需的控制器件数目愈来愈少,控制器件的体积愈来愈小,控制器的可靠性提高而成本日益降低,从而使得电机的应用不再局限于传统的工业领域,而逐渐向商业,家用电器、声像设备、电动自行车、汽车、机器人、数控机床、雷达和各种军用武器随动系统等领域拓展。
[1, 15]2 国内外发展概况电机的种类很多,其中,无刷直流电机以其优越的性能成为国内外科研机构的重点研究对象。
早期国内外对直流无刷电机的研究主要致力于将更加先进的电力电子器件和材料应用于直流无刷电动机以提高它的性能。
在八十年代以后,随着磁性材料(尤其是高性能的稀土永磁材料)、电力电子器件和专用控制器的迅速发展,明显改善了直流无刷电动机特性的同时,人们又把对直流无刷电动机研究的目光转移到电子换相、稀土永磁材料以及智能控制三个方面,试图来抑制直流无刷电动机的转矩波动。
除此之外,随着电机及驱动系统的发展,控制系统趋于智能化和数字化,使得许多较复杂的控制技术得以实现。
这些控制技术的实现又进一步推动了直流无刷电机在各个工业领域更好地应用,为直流无刷电机的发展打开了广阔的前景。
[2]3无刷电机控制3.1无刷直流电机无刷直流电机与传统直流电机相比,其结构上有较大不同,无刷直流电机将传统直流电机定子上的永磁体转移到转子上,而将电枢绕组置于定子上,并采用电子换向装置取代传统直流电机的机械式电刷换向器,使无刷直流电机在运行时无换向火花和无线电干扰,长时使用无需更换电刷,电机使用寿命长。
无刷直流电机紧凑的机械结构,使其能够更容易地实现小型化。
无刷直流电机相对于交流异步电机,具有高能量密度、高效率的特点,同时具有较好的调速性能。
第1篇一、实验目的1. 了解直流无刷电机的结构和工作原理。
2. 掌握直流无刷电机的驱动电路和控制方法。
3. 分析直流无刷电机的电气特性和调速特性。
4. 通过实验验证直流无刷电机的性能和效率。
二、实验原理直流无刷电机(BLDCM)是一种无刷、无电刷的直流电机,其通过电子换向器来改变电流方向,从而实现电机的转动。
与传统有刷直流电机相比,无刷直流电机具有以下优点:1. 寿命长:无刷电机没有碳刷磨损,因此寿命更长。
2. 高效率:无刷电机的能量转换效率高,可以达到90%以上。
3. 高速性能:无刷电机可以达到更高的转速。
4. 无火花:无刷电机没有电刷,因此不会产生火花。
直流无刷电机的驱动电路主要包括以下部分:1. 霍尔传感器:用于检测电机的转子位置。
2. 驱动芯片:用于控制电机的换向。
3. 电机绕组:由漆包线和绝缘材料组成。
4. 电源:提供直流电压。
三、实验设备1. 直流无刷电机:型号为NMB 2406KL-04W-B36,额定电流0.14A。
2. 霍尔传感器:用于检测电机的转子位置。
3. 驱动芯片:用于控制电机的换向。
4. 电机绕组:由漆包线和绝缘材料组成。
5. 电源:提供直流电压。
6. 示波器:用于观察电机绕组的电压波形。
7. 光电反射式转速表:用于测量电机的转速。
四、实验步骤1. 组装电机驱动电路:根据实验原理图,将霍尔传感器、驱动芯片、电机绕组和电源连接起来,组装成电机驱动电路。
2. 连接实验设备:将组装好的电机驱动电路与示波器和光电反射式转速表连接起来。
3. 启动电机:打开电源,启动电机,观察电机是否能够正常转动。
4. 观察电机转速:使用光电反射式转速表测量电机的转速,记录数据。
5. 观察电机绕组电压波形:使用示波器观察电机绕组的电压波形,分析电机的电气特性。
6. 调整电机转速:通过改变电源电压,调整电机的转速,观察电机的转速变化情况。
7. 分析实验数据:根据实验数据,分析电机的电气特性和调速特性。
无刷电机hall相序
无刷电机(Brushless DC Motors,简称BLDC)是一种电子换向的直流电动机,它使用位置传感器来检测转子的位置,从而控制电机的换向,使得电机运行更加高效和安静。
在无刷电机中,霍尔传感器通常用来检测转子的位置,以便正确地控制电机的相序。
霍尔传感器是一种能够感应磁场的传感器,它可以输出一个与磁场强度成比例的电信号。
在无刷电机中,通常会安装三个霍尔传感器,分别位于电机的A、B、C三个位置,它们对应电机的U、V、W三相。
当电机转子转动时,霍尔传感器会感应到转子上的磁场的变化,并输出信号给电机控制器。
电机的相序指的是三相电源与电机三相之间的连接顺序。
在无刷电机中,正确的相序是非常重要的,因为它决定了电机能否正常启动和运行。
如果相序接错,电机可能会出现反转或者运行不平稳的情况。
通常,电机制造商会在电机上标注明确的相序标记,比如使用不同的颜色标记三相线,或者提供相序图示。
在安装和维护无刷电机时,应确保遵循正确的相序,以保证电机的正常运行。
如果在更换霍尔传感器或者进行电机维护时改变了相序,可以通过观察电机运行状态或者使用专业的相序测试仪器来检测和调整相序。
无刷直流电机(BLDC)是一种广泛应用于工业和消费电子产品中的电机类型。
它们具有静音、高效、耐用和易于控制等优点。
驱动无刷直流电机需要一种有效的控制策略,以实现换向、续流和控制。
下面是一种可用的无刷直流电机驱动控制策略的概述。
1. 位置传感器:无刷直流电机通常使用位置传感器(如霍尔效应传感器)来提供电机每个线圈的电流状态和位置信息。
这些信息被用于控制电机的换向和旋转。
2. 换向控制:无刷直流电机的换向控制是通过调节电流来实现的。
当电机旋转时,电流在每个线圈中按顺序切换,从而产生推力使电机持续旋转。
换向控制通过调整电流的顺序和时间来实现,以确保电机的平稳换向和续流。
3. 续流控制器:续流控制器用于监测无刷直流电机的电流路径,以确保电流在整个电机中顺畅流动。
当电流断开时,续流控制器会启动一个信号,重新引导电流,以确保电机的连续运行。
4. 转速控制:通过调节输入到无刷直流电机的电压,可以控制电机的转速。
通过调整电压的频率和幅度,可以控制电机的转速精度。
此外,还可以使用PWM(脉宽调制)技术来调节电机电流,进一步控制转速。
5. 转矩控制:转矩是电机产生的推力,可以通过调节电机的电流和电压来控制。
通过调整电流和电压的比例,可以控制电机的输出转矩。
此外,还可以使用矢量控制技术来进一步优化电机的转矩控制。
6. 可控换向系统:可控换向系统使用先进的控制算法来预测电机的运动并提前调整电流,从而实现平滑的换向过程。
这些算法通常基于先进的数学模型和优化技术,以提高电机的效率和减少噪音。
7. 动态响应:在高速或动态应用中,无刷直流电机需要快速响应外部输入的变化。
为了实现这一目标,可以使用先进的控制算法来提高电机的动态性能,如使用鲁棒控制或自适应控制算法。
综上所述,无刷直流电机驱动控制策略的关键在于精确的电流控制、高效的换向系统和动态响应能力。
通过使用先进的控制算法和技术,可以实现高效、平稳和可靠的电机运行,同时降低噪音和提高效率。
电机对极与霍尔电机对极与霍尔传感器在电机控制中扮演着重要的角色。
在这里,我将简要解释这两个概念,并讨论它们在电机运行中的作用。
一、电机对极电机对极是指电机中的磁极对,通常由两个相对的磁极组成,比如南极和北极。
在同步电机中,这些磁极是静态的,由永磁体或电磁体产生。
在异步电机(感应电机)中,磁极是由电流在转子绕组中产生的,这些绕组与定子绕组交链,根据法拉第电磁感应定律产生转矩。
对极的配置决定了电机的工作原理和性能。
例如,三相交流电机通常采用Y型连接或星形连接,其中每相的绕组都与相邻两相的绕组形成对极。
二、霍尔传感器霍尔传感器是一种能够检测磁场强度和方向的传感器,它基于霍尔效应原理工作。
霍尔效应是指当电流通过一片薄金属片时,如果该金属片置于磁场中,将在金属片的一侧产生一个电压,这个电压与磁场强度和电流方向有关。
霍尔传感器在电机控制中的应用非常广泛,尤其是在需要精确控制电机转速和位置的应用中。
它们可以用来检测电机转子的绝对位置,以便于控制系统准确地控制电机的换向和转速。
三、电机对极与霍尔传感器的结合在许多现代电机控制系统中,霍尔传感器被用来实现对电机对极的精确检测。
例如,无刷直流电机(BLDC)使用霍尔传感器来确定转子的磁极位置,从而实现精确的换向。
由于无刷直流电机没有碳刷和换向器,因此需要霍尔传感器来提供转子的位置信息,以供控制系统进行正确的电流控制。
霍尔传感器不仅用于无刷直流电机,还用于其他类型的电机,如同步电机和异步电机,以提高电机运行的效率和精度。
总之,电机对极和霍尔传感器都是电机正常运行不可或缺的部分。
电机对极决定了电机的工作原理,而霍尔传感器则提供了关于电机运行状态的关键信息,使得电机控制更加精确和高效。
无刷直流电动机驱动方式分析无刷直流电动机(BLDC)是一种通过电子器件控制旋转电机转子的直流电动机。
相对于传统的有刷直流电动机,BLDC电动机具有更高的效率、更长的寿命和更低的维护成本。
在工业、家电和汽车等领域得到了广泛应用。
无刷直流电动机的驱动方式包括传统的硬件控制驱动和现代的软件控制驱动。
传统的硬件控制驱动方式通常使用霍尔传感器进行转子位置反馈,以确定电机相位的开关时间,从而实现电机的正向和反向旋转。
这种驱动方式简单且成本较低,但霍尔传感器的安装和维护带来了一定的麻烦。
现代的软件控制驱动方式利用传感器上传的电机状态信息和控制算法,实时调整开关时间和相位电流,从而实现电机的高效能运行。
这种驱动方式通常称为“无传感器控制”或“传感器失效控制”,可以降低系统成本和提高可靠性。
其中一种常用的算法是电角度估算,通过计算电机的电流和电压来估算转子的实际角度。
另外,有些高端的驱动器则使用电磁回馈控制算法,通过直接测量电机的转矩和速度来实现更精确的控制。
无刷直流电动机的驱动方式也可以根据应用需求进行更多的划分。
例如,在一些需要高速度和高精度的应用中,通常采用矢量控制(也称为场定向控制)方式,通过实时调整电机的相位电流和频率来实现精确的转矩和速度控制。
而在一些需要高转矩和快速响应的应用中,通常采用直流转矩控制方式,通过实时调整电机的电流和转矩来实现高转矩和快速加速。
总的来说,无刷直流电动机的驱动方式包括传统的硬件控制驱动和现代的软件控制驱动。
无论采用哪种驱动方式,都需要根据具体应用需求选择适当的控制算法和硬件组件,以实现高效、安全和可靠的电机运行。
摘要摘要近些年来,随着人们对保护生态环境意识的逐渐提高,电动车得到了迅速发展,相信这种电动车在将来会成为人们广泛应用的一种交通工具。
本文介绍了基于TMS320LF2407的霍尔位置传感器直流无刷电机控制系统的设计原理和设计过程。
以如何构建该系统为中心,侧重于TMS320LF2407技术在BLDCM 控制系统中的具体应用。
首先对直流无刷电机的基本组成环节、基本工作原理作了详细的介绍,分析了直流无刷电机的换相过程和PWM 信号的分配情况。
在此基础上,提出了基于DSP 技术的有位置传感器设计方案,并根据该方案分别进行了硬件电路和系统软件的设计与调试。
硬件部分先作了整体设计的论述,然后对主要的电路设计,及一些重要电子元器件及其参数的选择做了介绍。
软件部分也首先介绍了整体设计,接着详细论述了软件实现方面的几个问题。
关键词:电动车;无刷直流电动机;霍尔位置传感器;TMS320LF2407ABSTRACTABSTRACTIn the recent years,as People are gradually awareness of protecting the ecological environment,the electric vehicles has been rapid developed. So we believe the electric vehicles will be widely used in the future.This document presents the theory and process of the design for a hall position sensor BLDCM motor using TMS320LF2407. Regard how to structure the control system with TMS320LF2407 chip as the center in this paper .I first talk about the basic component part, the basic running principle of the BLDG motor. Followed, it analyses the course of changing phase and distributing of PWM signal. Based on these facts, we present the sensor solution for BLDG motor, design the hardware system and software system. The part of hardware design first expounds the whole design. Then the design of several primary circuits is discussed and the choice of some important electronic components and their parameters in these circuits is analyzed. The part of software design also first discusses the whole design. Then some problems on soft ware realization are dissertated.Key words :the electric vehicles;BLDCM;hall position sensor;TMS320LF2407毕业设计(论文)原创性声明和使用授权说明原创性声明本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。
直流无刷电机的控制系统设计方案直流无刷电机(BLDC)是一种能够提供高效可靠的电动机驱动方案的电机。
它具有高效率、高功率密度、长寿命和低噪音等特点,广泛应用于工业、汽车和消费电子等领域。
在这篇文章中,我们将探讨直流无刷电机控制系统的设计方案。
一、控制器选择选择合适的控制器对于直流无刷电机的性能至关重要。
常见的控制器包括传感器基本反馈控制器和无位置传感器矢量反馈控制器。
1.传感器基本反馈控制器:传感器基本反馈控制器通过对电机速度和位置的测量反馈来控制电机。
它具有简单的硬件结构和易于实现的特点,适用于对控制精度要求不高和成本要求较低的应用。
2.无位置传感器矢量反馈控制器:无位置传感器矢量反馈控制器通过使用电流、电压和速度等参数来估计电机的位置和速度,从而进行闭环控制。
它能够提供更高的控制精度和动态性能,适用于对控制精度要求较高的应用。
二、传感器选择1.霍尔传感器:霍尔传感器通过检测电机转子上的永磁体磁场变化来确定电机的位置。
它具有结构简单、成本低和使用方便等优点,适合于低成本和低精度的应用。
2.编码器:编码器通过检测电机转子的机械运动,如转子的转速和位置来确定电机的位置。
它具有较高的精度和抗干扰能力,适用于对控制精度要求较高的应用。
3.霍尔传感器与编码器混合使用:为了兼顾成本和精度要求,可以采用霍尔传感器与编码器混合使用的方式进行控制。
霍尔传感器用于测量电机的粗位置信息,编码器用于提供更精确的位置和速度信息。
三、控制策略选择1.电流控制:电流控制是直接控制电机的电流大小和方向,从而控制电机的转矩。
它具有快速响应和较高的控制精度等优点,适用于对控制精度要求较高的应用。
2.速度控制:速度控制是通过控制电机输入电压或电流的大小来控制电机的转速。
它具有稳定性好、抗负载扰动能力强等优点,适用于需要稳定转速的应用。
3.位置控制:位置控制是通过控制电机输入电压或电流的大小来控制电机的位置。
它具有控制精度高、抗负载扰动能力强等优点,适用于需要精确定位的应用。
基于霍尔位置信号的无刷直流电机直接转矩控制张兰红;唐慧雨;何坚强【摘要】深入分析了无刷直流电机直接转矩控制技术的特殊性,指出3个关键点:一是导通相电压矢量是改变电磁转矩的关键物理量;二是全关断电压矢量可以作为所有导通相电压矢量的公共反矢量;三是可以省去磁链环,采用转矩单环控制.依据上述3点建立了无刷直流电机直接转矩控制的最优导通相电压矢量选择表.分析了根据霍尔位置信号进行转子磁场扇区划分的方法,提出了根据相电流形状函数和霍尔位置信号关系进行转矩观测的方法,解决了使用简单价廉的霍尔位置传感器的无刷直流电机直接转矩控制系统的实现问题.实验结果表明基于霍尔位置信号的无刷直流电机直接转矩控制系统静、动态性能优良.【期刊名称】《电机与控制学报》【年(卷),期】2018(022)009【总页数】8页(P56-63)【关键词】无刷直流电机;直接转矩控制;电压矢量;霍尔位置信号;相电流形状函数【作者】张兰红;唐慧雨;何坚强【作者单位】盐城工学院电气工程学院,江苏盐城224051;盐城工学院电气工程学院,江苏盐城224051;江苏大学电气信息工程学院,江苏镇江212013;盐城工学院电气工程学院,江苏盐城224051【正文语种】中文【中图分类】TM3510 引言无刷直流电机(brushless DC motor,BLDCM)由于结构简单、出力大和效率高,在国防、航空航天、工业控制、汽车电子及家用电器等领域获得了越来越广泛的应用[1-3]。
为使无刷直流电机从低端产品向高性能产品转化,许多优秀的控制技术被应用于无刷直流电机中,直接转矩控制技术(direct torque control,DTC)是其中的典型代表[4-13]。
DTC最初针对异步电机提出,它通过选择电压空间矢量,实现对电机转矩的直接控制,使电机具有极佳的转矩动态响应性能[14]。
无刷直流电机两相导通方式因理论计算的脉动小于三相导通方式而获得更广泛的应用,但由于非理想反电势方波与非严格电流方波等因素,两相导通的无刷电机转矩脉动仍然比较明显[4]。
无刷直流电机转子位置的检测方法
无刷直流电机转子位置的检测方法主要有以下几种:
1. 通过传感器检测:这是最常规的方法,可以直接观察到转子的当前位置。
通常使用的是霍尔元件传感器,这是一个非常小巧的元件,对磁场的变化非常敏感,当转子旋转的时候,磁场会发生变化,霍尔元件也就能即时输出信号。
2. 通过反电势法检测:无刷电机的转子在运转的时候,不光会把电能转化成为动能,而且也同时会输出反向的电动势,通过观测转子输出的反向电动势,同样可以估算出转子的位置。
这是一种间接的手法,但目前也同样可以达到比较高的精度。
以上信息仅供参考,如需了解更多信息,建议查阅无刷直流电机相关书籍或咨询专业人士。
无刷直流电机的组成及工作原理2.1 2.1 引言引言直流无刷电动机一般由电子换相电路、转子位置检测电路和电动机本体三部分组成,电子换相电路一般由控制部分和驱动部分组成,电子换相电路一般由控制部分和驱动部分组成,而对转子位置的检测一而对转子位置的检测一般用位置传感器来完成。
工作时,控制器根据位置传感器测得的电机转子位置有序的触发驱动电路中的各个功率管,序的触发驱动电路中的各个功率管,进行有序换流,进行有序换流,进行有序换流,以驱动直流电动机。
以驱动直流电动机。
以驱动直流电动机。
下文从下文从无刷直流电动机的三个部分对其发展进行分析。
2.2 无刷直流电机的组成无刷直流电机的组成2.2.1 电动机本体电动机本体无刷直流电动机在电磁结构上和有刷直流电动机基本一样,但它的电枢绕组放在定子上,转子采用的重量、简化了结构、提高了性能,使其可*性得以提高。
无刷电动机的发展与永磁材料的发展是分不开的,磁性材料的发展过程基本上经历了以下几个发展阶段:铝镍钴,铁氧体磁性材料,钕铁硼(NdFeB )。
钕铁硼有高磁能积,它的出现引起了磁性材料的一场革命。
它的出现引起了磁性材料的一场革命。
第三代钕铁硼永磁材料的第三代钕铁硼永磁材料的应用,进一步减少了电机的用铜量,促使无刷电机向高效率、小型化、节能的方向发展。
向发展。
目前,目前,为提高电动机的功率密度,为提高电动机的功率密度,为提高电动机的功率密度,出现了横向磁场永磁电机,出现了横向磁场永磁电机,出现了横向磁场永磁电机,其定子齿槽与电枢其定子齿槽与电枢其定子齿槽与电枢 线圈在空间位置上相互垂直,线圈在空间位置上相互垂直,电机中的主磁通沿电机轴向流通,电机中的主磁通沿电机轴向流通,电机中的主磁通沿电机轴向流通,这种结构提高了这种结构提高了气隙磁密,能够提供比传统电机大得多的输出转矩。
能够提供比传统电机大得多的输出转矩。
该类型电机正处于研究开发该类型电机正处于研究开发阶段。
阶段。
直流无刷电机的电流采集直流无刷电机是一种常用于工业和家用电器的电机类型,其优点包括高效率、低噪音和可靠性。
在直流无刷电机的运行过程中,电流的采集是非常重要的,可以帮助我们监测电机的工作状态并进行控制。
电流采集是通过传感器来实现的,传感器可以感知电流的大小和方向,并将其转换成电信号输出。
常用的电流传感器有霍尔效应传感器、电阻传感器和互感传感器等。
我们来介绍一种常用的电流传感器——霍尔效应传感器。
霍尔效应传感器利用霍尔元件的特性来检测电流。
当电流通过导线时,霍尔元件感受到磁场的作用,产生霍尔电势差。
这个电势差与电流成正比,通过测量电势差的大小,我们可以得到电流的大小。
霍尔效应传感器的优点是响应速度快、精度高,但也存在一定的温度漂移问题,需要进行温度补偿。
另一种常用的电流传感器是电阻传感器。
电阻传感器是通过测量电流通过一个已知电阻产生的电压降来计算电流的大小。
电阻传感器的原理比较简单,适用于低频电流测量,但由于电阻本身的存在,会对电路产生一定的负载。
互感传感器是一种电流传感器的变种,它利用电流通过线圈产生的磁场与另一个线圈产生的感应电动势之间的关系来测量电流。
互感传感器的优点是响应速度快、精度高,但需要注意的是,互感传感器对电流的频率有一定的要求,适用于高频电流测量。
在直流无刷电机中,电流采集的目的有两个:一是为了监测电机的工作状态,及时发现异常情况,如过载、短路等;二是为了对电机进行控制,调整电机的运行速度和转矩。
通过电流采集,我们可以得到电机的实时电流值,并根据需要进行处理和反馈控制。
在电流采集过程中,我们还需要考虑信号的放大和滤波问题。
电流传感器输出的信号较小,需要经过放大电路进行放大,以便后续的处理和控制。
同时,由于电机的工作过程中会产生一些噪音和干扰,我们还需要对信号进行滤波处理,以提高采集信号的稳定性和准确性。
总结来说,直流无刷电机的电流采集是一项重要的任务,可以帮助我们监测电机的工作状态并进行控制。
霍尔位置传感器在无刷直流电机中的应用[摘要]无刷直流电动机是随着半导体技术发展而出现的新型机电一体化电机,它是现代电子技术、控制理论和电机技术相结合的产物。
位置传感器是无刷直流电机系统组件部分之一,其作用是检测主转子在运动过程中相对于定子绕组的位置。
霍尔位置传感器具有结构简单、体积小、安装灵活方便、易于机电一体化、价格低等优点,得到广泛的应用。
目前,霍尔集成电路传感器是无刷直流电机最主要使用的转子位置传感器。
本论文主要研究霍尔位置传感器在无刷直流电机具体安放位置。
为了方便研究,在其中讲述了无刷直流电机的工作原理、霍尔效应、霍尔元件在无刷电机中的及其换相过程的实现以及对无刷直流电机进行调速的PWM法原理,论文研究的思路是通过分析霍尔位置传感器与三相磁动势的对应关系,得到霍尔位置传感器的准确安放位置。
通过结果验证,准确定位后安装的霍尔位置传感器,可以使无刷电机完成正确的换相次序,确保无刷电机安全稳定的运行,满足工业生产需求。
[关键词]无刷直流电机;霍尔传感器Hall position sensors in the brushless DC motor application[Abstract] Brushless DC motor is as semiconductor technology development and the emergence of new Mechatronics Motor, it is a modern electronic technology, control theory and motor technology combined with the product. Position sensor is a brushless DC motor system of the component parts, its role is to detect the main rotor in motion relative to the position of the stator winding. Hall position sensor has a simple structure, small size, flexible installation, easy mechatronics, low price, is widely used. At present, the Hall IC sensor is a brushless DC motor with a rotor position sensor main.In this thesis, the Hall position sensors in brushless DC motor concrete placement. In order to facilitate research, which tells the story of the brushless DC motor works, Hall effect, the Hall element in the brushless motor commutation process of its implementation and the brushless DC motor speed control PWM method principle, thesis idea is through the analysis phase hall sensor with MMF correspondence between the hall position sensors to obtain the exact placement. By results of verification, accurate positioning of the Hall position sensor after installation, you can make brushless motor commutation can be done right order, to ensure safe and stable operation of the brushless motor to meet industrial production needs.[Key words] Brushless DC motor ;Hall sensor前言随着工业生产对电机性能要求的不断提高,传统的有刷电机越来越不能满足人们的要求,取而代之的是无刷电机,主要原因是传统的有刷电机是依靠换向器实现换向功能的,属于机械换向,存在一些致命的弱点:(1)机械接触换向产生的换向火花引起换向器和电刷磨损、电磁干扰,导致噪声大,寿命短;(2)结构复杂,可靠性差,故障多,需要经常维护;(3)由于换向器存在,限制了转子转动惯量的进一步下降,影响了动态特性[22。
因此,无刷电机应运而生。
无刷电机主要的优点是运用电子器件实现电子换向的,由于是电子换向,不存在机械换向间的摩擦,电机的使用寿命、性能和可靠性等都得到了很大程度的提高。
考虑到无刷电机的优越性能,同时为了降低产品生产的成本,我司决定自行研究开发无刷直流电机。
按照无刷直流电机工作原理,必须有转子磁极位置信号来决定电子开关的换向。
目前,大多数采用安装位置传感器(例如霍尔元件)的方法来得到这些信号。
具体的实现过程:位置传感器是无刷直流电机系统组件部分之一,其作用是检测主转子在运动过程对于定子绕组的相对位置,将永磁转子磁场的位置信号转换成电信号,为逻辑开关电路提供正确的换向信息,以控制它们的导通和截止,使电动机电枢绕组中的电流随着转子位置的变化按次序换相,形成气隙中步进式的旋转磁场,驱动永磁转子连续不断的旋转。
本论文主要研究霍尔传感器位置的安放,沿用前人研究的成果,关于霍尔位置传感器与三相磁动势对应关系,并在此基础基础上进行分析的。
具体的解决思路是首先了解无刷电机的工作原理,理解霍尔元件的工作原理特性,无刷电机换相的具体要求,然后考虑出霍尔元件与三相磁动势的对应关系,进而得出霍尔元件的正确安放位置。
绪论霍尔位置传感器在无刷电机中的应用1绪论1.1 无刷直流电动机的发展概况无刷直流电动机是在有刷直流电动机的基础上发展起来的,这一渊源关系从其名称中就可以看出来。
有刷直流电动机从19世纪40年代出现以来,以其优良的转矩转速控制特性,在相当长的一段时间内一直在调速控制领域占据主导地位。
但是,带有机械接触的电刷-换向器一直是电流电机的一个致命弱点:(1)机械接触换向产生的换向火花引起换向器和电刷磨损、电磁干扰,导致噪声大,寿命短;(2)结构复杂,可靠性差,故障多,需要经常维护;(3)由于换向器存在,限制了转子转动惯量的进一步下降,影响了动态特性。
因此,它降低了系统的可靠性,限制了其在很多场合中的使用。
为了取代有刷直流电动机的机械接触式换向装置,人们进行了长期的探索[1]。
早在1917年,Bolgior就提出了用整流管代替有刷直流电动机的机械电刷,从而诞生了无刷直流电机的基本思想。
1955年美国的D.Harrison等首次申请了用晶体管换相电路代替有刷直流电动机的机械电刷的专利,标志着现代无刷直流电动机的诞生。
无刷直流电动机的发展在很大程度上取决于电力电子技术的进步,在无刷直流电动机发展的早期,由于当时大功率开关器件仅处于初级发展阶段,可靠性差,价格昂贵,加上永磁材料和驱动控制技术水平的制约,使得无刷直流电动机自发明以后的一个相当长的时间内,性能都不理想,只能停留在实验阶段,无法推广使用,1970年以后,随着电力半导体工业的飞速发展,许多新型的全控型半导体功率器件(如GTR、MOSFET、IGBT等)相继问世,加之高磁能积永磁材料(如SmCo、NsFeB)陆续出现,这些均为无刷直流电动机广泛应用奠定了坚实的基础。
无刷直流电动机系统也因此而得到了迅速的发展。
在1978年汉诺威贸易博览会上,前联邦德国的MANNESMANN公司正式推出了MAC无刷直流电动机及其驱动器,引起了世界各国的关注,随即在国际上掀起了研制和生产无刷直流系统的热潮,这业标志着无刷直流电动机走向实用阶段。
霍尔位置传感器在无刷直流电机中的应用随着人们对无刷直流电动机特性了解的日益深入,无刷直流电动机的理论也逐渐得到了完善。
1986年,H.R.Bolton对无刷直流电动机作了全面系统的总结,指出了无刷直流电动机的研究领域,成为无刷直流电动机的经典文献,标志着无刷直流电动机在理论上走向成熟[2]。
我国对无刷直流电动机的研究起步较晚。
1987年,在北京举办的联邦德国金属加工设备展览会上,SIEMENS和BOSCH两公司展出了永磁同步伺服系统和驱动器,引起了国内有关学者的广泛关注,自此国内掀起了研制开发和技术引进的热潮。
经过多年的努力,目前,国内已有无刷直流电动机的系列产品,形成了一定的生产规模。
位置传感器是无刷直流电机系统组件部分之一,其作用是检测主转子在运动过程对于定子绕组的相对位置,将永磁转子磁场的位置信号转换成电信号,为逻辑开关电路提供正确的换向信息,以控制它们的导通和截止,使电动机电枢绕组中的电流随着转子位置的变化按次序换相,形成气隙中步进式的旋转磁场,驱动永磁转子连续不断的旋转。
矩形波驱动的永磁直流无刷电机的位置传感器主要分为磁电式、光电式、磁敏式等几种[3]。
其中,霍尔传感器(磁敏式)以其优良的特点脱颖而出。
1.2 霍尔传感器发展趋势与研究的主攻方向按照无刷直流电机工作原理,必须有转子磁极位置信号来决定电子开关的换向。
目前,大多数采用安装位置传感器(例如霍尔元件)的方法来得到这些信号。
国际上,传感器技术日益发展,2012年全球传感器市场容量为650亿美元,预计2015年全球传感器市场可达720亿美元以上。
在东欧、亚太区以及加拿大已经成为传感器市场增长最快的地方,而今经济发达的美国、德国以及日本仍是传感器市场分布最大的地区[3]。
就世界而言,霍尔传感器是市场上增长最快的。
世界各国对霍尔传感器的理论研究、新材料应用及新产品开发都十分重视,然而各国传感器的技术进步也非常迅速。
一些发达国家不断研发新型传感器,从而使传感器的性能也大大提高。
2012年前后,国外敏感元件与传感器发展的总体趋势是小型化、集成化、阵列化、智能化、系统化和网络化。
传感器领域的主要技术将在现有基础上予以延伸和提高,各国竞争将加速新一代传感器的开发和产业化[4]。
国内,很多生产生活方面都用到传感器,主要产品有:温度传感器、压力传感器、磁电传感器、流量传感器、液位传感器、湿敏传感器、力敏传感器、气敏传感器,用于工业生产的还有:开关类的接近/定位传感器、安全门开关等安全传感器、旋转编。