无刷直流电动机中的霍尔位置传感器
- 格式:pdf
- 大小:256.97 KB
- 文档页数:5
bldc电机霍尔测速公式
BLDC电机霍尔测速公式
近年来,随着科技的不断进步,无刷直流电机(BLDC)在许多领域得到了广泛应用。
而在BLDC电机的控制过程中,霍尔测速公式扮演着至关重要的角色。
BLDC电机是一种无刷直流电机,它通过定子上的霍尔传感器来感知转子的位置,从而实现电机的控制。
霍尔传感器是一种基于霍尔效应的传感器,它能够感知磁场的变化。
在BLDC电机中,通常会有三个霍尔传感器,分别对应于电机的三个相位。
根据霍尔测速公式,我们可以通过检测霍尔传感器输出的信号来确定电机的转速。
具体来说,当转子旋转时,磁场的变化会引起霍尔传感器输出信号的变化。
通过测量这些信号的时间间隔,我们可以计算出电机的转速。
需要注意的是,霍尔测速公式只能提供电机的转速信息,并不能提供电机的位置信息。
因此,在实际应用中,通常会结合其他传感器或算法来实现电机的闭环控制。
使用霍尔测速公式进行BLDC电机的控制具有许多优点。
首先,霍尔传感器具有高精度和快速响应的特点,能够准确地感知电机的转速变化。
其次,霍尔测速公式的计算过程简单,可靠性高,适用于实时控制。
此外,由于霍尔传感器的体积小,成本低,因此在实际
应用中广泛采用。
BLDC电机霍尔测速公式是实现电机控制的重要工具。
通过测量霍尔传感器输出信号的变化,我们可以准确地获取电机的转速信息,从而实现对电机的精确控制。
在今后的发展中,随着科技的不断进步,相信BLDC电机的控制技术会得到进一步的提升,为各行各业带来更多创新和便利。
无刷电机霍尔作用
无刷电机是一种应用广泛的电动机,能够在各种领域中得到应用。
其中,霍尔作用是控制无刷电机运转的关键因素之一,下面我们就来看
一看无刷电机霍尔作用具体有哪些方面。
一、什么是霍尔元件?
霍尔元件是一种基于霍尔效应的传感器,它由霍尔晶体、滤波器和放
大器组成。
二、霍尔效应的工作原理是什么?
霍尔效应是指当一个电流通过一条薄膜或线性导体时会形成横向磁场,此时如果在薄膜或线性导体上放置一个垂直于电流方向的磁场,那么
就会在横向方向上产生电位差。
三、霍尔元件在无刷电机中的应用
无刷电机中的霍尔元件主要有两个用途:
1、检测转子位置:在无刷电机运转时,控制器需要知道转子在何处才
能正确地输入电流,同时避免电源出现相反的磁场。
2、检测电机速度和加速度:施加磁场使霍尔元件输出脉冲信号,频率与电机转速成正比,可以通过对脉冲信号的计数来确定电机的转速和加速度。
四、霍尔元件的位置安装
无刷电机需要确定转子位置才能开始运转,霍尔元件能够检测转子相对于电机的角度位置。
霍尔元件通常放置在电机的定子上方,这样可以在转子的四个极位上检测出磁场的变化,从而确保转子的位置。
五、总结
无刷电机的运转受到众多因素的影响,其中霍尔元件是重要的控制因素之一。
在定位转子位置和检测电机速度和加速度方面,霍尔元件发挥着重要的作用。
随着技术的不断革新和升级,无刷电机将得到更广泛的应用和推广,也将有更多的领域投入无刷电机技术的发展。

AH41双极锁存霍尔开关电路
AH41霍尔开关电路最适于响应变化斜率陡峭的磁场并在磁通密度较弱的场合使用,适用于单极或多对磁环工作,它由反向电压保护器、电压调整器、霍尔电压发生器、信号放大器、史密特触发器和集电极开路的输出级组成。
工作温度范围为-40 ~150℃(存储温度为150℃),可适用于各种机及机电一体化领域。
产品特点
. 电源电压范围宽 . 可用市售的小磁环来驱动 . 无可动部件、可靠性高 . 尺寸小 . 抗环境应力
. 可直接同双极和MOS 逻辑电路接口
应用示意图
电特性
T A =-40℃~150℃
量 值
参 数 符号测试条件
最 小 典 型
最 大
单 位
电源电压 V CC
4.5
- 24 V
输出低电平电压 V out I out =20mA B>B OP
- 200 400 mV 输出高电平电流 I OFF V out =24V B<B RP
- 0.10 10 μA
电源电流 I CC V CC =24V 输出端开路 - 10 mA 输出上升时间 t r Vcc=12V R L =1.1K Ω C L =20Pf - 0.12 - μS 输出下降时间
t Vcc=12V R =1.1K Ω C =20Pf
- 0.18 - μS
f
L L
HALL SWITCH SENSORS
V=4.5~24V。
无刷直流电机中霍尔传感器空间安放位置研究0 引言霍尔位置传感器在无刷直流电机中起着检测转子磁极位置的作用,为逻辑开关电路提供的换向信息,即将转子磁钢磁极的位置信号转换成电信号,然后去控制定子绕组的换向导通[1]。
初步实验结果表明,电枢反应和位置传感器的改变对霍尔检测信号影响较大,直接影响了电机绕组的换流,引起电机力矩波动从而带来噪音。
文中针对引起霍尔传感器位置检测误差的主要因素进行了分析,并且通过对样机电机的三维有限元仿真计算,得到了霍尔传感器检测漏磁场的分布,为霍尔传感器的安放位置提供了依据。
1 霍尔安放位置问题1.1 产生霍尔传感器位置检测误差的因素产生霍尔传感器位置检测误差的因素主要有以下两方面:①霍尔传感器的参数;②传感器安装位置处的磁场变化[2]。
①磁密滞环宽度开关型霍尔元件只有在检测到磁场到达某一数值时,霍尔开关接通;而磁感应强度降低到某一数值以下,霍尔开关断开,因此输出信号的过零点与磁密过零点并不重合。
而这些事件的触法点叫吸合点和释放点。
开关型产品一般都给出吸合点和释放点的最大和最小磁感应强度,保证在最大吸合点和最小释放点所有开关接通或断开,但某一开关可能在这两个极限值之内吸合或释放。
虽然某些产品不给出某一元件在两极限值之内的具体切换点,但保证有最小滞环,这一特性使得输出信号不会因为输入信号的微小波动而发生错误的跳变,以防抖动。
实际应用中霍尔传感器的输出信号与绕组反电势之间期望的相位关系只能在一个方向上实现[3]。
在另一个方向上将出现位置检测误差,如位置误差值为磁密滞环宽度,等于二倍的磁密门槛值;式中s 是从0 到D 值之间磁密随转子转角的平均变化率。
如果传感器敏感的磁密按幅值为0.3T 的正弦函数变化,霍尔传感器的门槛值为0.01mT,则在一个电周期内位置误差为θ = arcsin(2*0.01/0.3)=3.85° 。
由式(1)可知,霍尔检测位置误差值可以通过选择滞环宽度小的霍尔传感器或者通过合理的计算安装位置处的磁密来选择合适的安装位置以获得高的磁密的变化率来进行抑制。
带霍尔传感器的三相无刷直流电机控制无刷直流电动机(BLDC),也称为电子换向电动机(ECM、EC 电动机)或同步直流电动机,是由直流电通过逆变器或开关电源供电的同步电动机,该同步电动机会产生交流电流来驱动各相通过闭环控制器控制电机。
控制器向控制电机速度和扭矩的电机绕组提供电流脉冲。
与有刷电机相比,无刷电机的优势在于高功率重量比、高速度和电子控制。
无刷电机在计算机外围设备(磁盘驱动器、打印机)、手持电动工具以及从模型飞机到汽车的车辆等地方都有应用。
该项目描述了如何使用GreenPAK? 控制三相无刷直流电机。
下面我们描述了了解解决方案如何编程以创建直流电机控制所需的步骤。
但是,如果您只是想得到编程的结果,XZGreenPAK Designer 软件查看已经完成的GreenPAK Design 文件。
将GreenPAK 开发套件插入您的计算机,然后点击程序来设计设备。
构造和运行原理BLDC 电机的结构和操作与交流感应电机和有刷直流电机非常相似。
与所有其他电机一样,BLDC 电机也由转子和定子组成(图1)。
BLDC 电机定子由叠层钢制成,用于承载绕组。
定子中的绕组可以按两种模式排列-星形图案(Y) 或三角形图案(Δ)。
两种模式之间的主要区别在于Y 模式在低RPM 时提供高扭矩,而? 模式在低RPM 时提供低扭矩。
这是因为在? 配置中,一半的电压施加在未驱动的绕组上,从而增加了损耗,进而增加了效率和扭矩。
BLDC 电机使用电气循环进行控制。
一个电循环有 6 个状态。
基于霍尔传感器的电机换向序列如图 2 所示。
BLDC 电机运行的基本原理与有刷直流电机相同。
对于有刷直流电机,反馈是使用机械换向器和电刷实现的。
在BLDC 电机中,使用多个反馈传感器实现反馈。
Z常用的传感器是霍尔传感器和光学编码器。
在三相BLDC 中,齿(极)数是3 的倍数,磁铁数是2 的倍数。
根据磁铁和齿的数量,每个电机具有不同数量的齿槽效应(即磁吸力)转子和定子)每转步数。
霍尔传感器应用于无刷电机驱动控制摘要:在无刷电机驱动控制中,利用霍尔元件检测转子位置,用其感应信号传输位置或速度偏差电压控制系统,即利用霍尔元件的乘法函数产生与偏差成比例的无刷电机转矩。
如果在实际应用中正确使用霍尔集成传感器,可以大大简化控制系统,使其性能更加稳定。
关键词:霍尔传感器;无刷电机;驱动控制1霍尔元件用作无刷电机磁敏元件原理1.1霍尔元件工程原理霍尔元件是基于霍尔效应原理由半导体材料制成的。
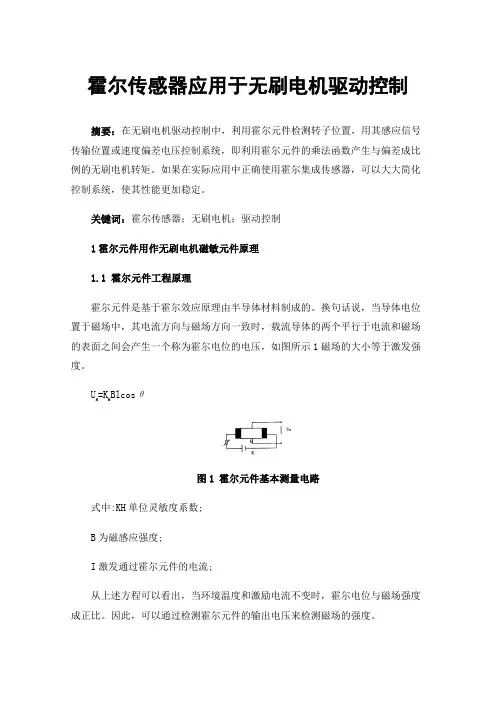
换句话说,当导体电位置于磁场中,其电流方向与磁场方向一致时,载流导体的两个平行于电流和磁场的表面之间会产生一个称为霍尔电位的电压,如图所示1磁场的大小等于激发强度。
UH =KHBlcosθ图1霍尔元件基本测量电路式中:KH单位灵敏度系数;B为磁感应强度;I激发通过霍尔元件的电流;从上述方程可以看出,当环境温度和激励电流不变时,霍尔电位与磁场强度成正比。
因此,可以通过检测霍尔元件的输出电压来检测磁场的强度。
1.2霍尔元件用作无刷电机磁极位置检测永磁钢通常用于无刷电机,交流或通过定子线圈的脉动电流。
所述方法可以省去电刷和换向器以产生旋转磁场。
磁极与旋转永磁磁极钢之间的转矩角的旋转磁场应保持在接近一半的范围内,这样才能产生良好的转矩。
因此,霍尔元件可以作为磁传感器来检测转子位置,信号用于激励定子线圈。
图1给出了无刷电机霍尔元件的磁极位置检测电路。
霍尔元件H的输出电压随着电机旋转时磁场的变化而变化。
晶体管T和T2交替打开和关闭,从A端和B端输出两个相反的信号。
电极电阻可根据输出电压调节,霍尔元件H可为5F-MS-07f。
2采用霍尔元件的无刷电机驱动电路2.1霍尔元件感应信号的放大驱动由霍尔元件产生的信号需要通过驱动和放大来激励定子线圈。
图2显示了霍尔元件的无刷电机驱动电路,工作原理:利用两个霍尔组件H连接的两相绕组换向器电动机,电动机绕组的L \和Lq和Ls和我有一个阶段的电角度180°的开关,有一个90°阶段霍尔元件H和H2电角之间的关系。
一、介绍BLDC电机(Brushless DC Motor)是一种无刷直流电机,它采用永磁体和电子元件来实现换向。
为了准确控制电机的转速和位置,通常需要使用霍尔传感器来检测转子的位置。
在本文中,我们将讨论如何利用霍尔传感器来计算BLDC电机的位置,以便实现精准的控制。
二、BLDC电机的工作原理1. 基本结构BLDC电机由定子和转子组成,其中定子上安装有绕组,用来产生磁场。
而转子上则安装有永磁体或者电子式永磁体。
转子上的永磁体通过控制器产生的交变磁场来进行换向,从而驱动电机转动。
2. 霍尔传感器为了确定转子的位置,通常在电机的定子上安装三个霍尔传感器,它们均匀分布在电机的周围,并与转子上的永磁体对准。
当转子旋转时,霍尔传感器可以检测永磁体的位置,并将此信息反馈给控制器。
三、霍尔传感器位置计算的原理1. 传统方法传统的霍尔传感器位置计算方法是通过检测霍尔信号的变化来确定转子的位置。
通过对霍尔信号进行脉冲计数,可以确定转子的位置,但是这种方法存在精度不高,响应速度慢的缺点。
2. 电子换向方法电子换向方法是一种新的转子位置计算方法,它通过对霍尔信号进行处理,可以准确快速地确定转子的位置。
通过采集霍尔信号的变化,结合预先存储的转子位置信息,控制器可以实时计算出转子的位置,并相应地进行换向控制。
四、实际应用随着电机控制技术的不断发展,电子换向方法已经被广泛应用于BLDC 电机控制系统中。
通过使用电子换向方法,可以大大提高电机的控制精度和响应速度。
电子换向方法还可以减少霍尔传感器的数量,降低系统成本。
五、总结BLDC电机的位置控制对于实现精密控制和高效运行至关重要,而霍尔传感器位置计算方法则是实现精准控制的关键。
通过使用电子换向方法,可以提高转子位置计算的精度和响应速度,从而实现更加精准和高效的电机控制。
随着技术的不断进步,相信电子换向方法将会在BLDC电机控制领域发挥越来越重要的作用。
六、电子换向方法的优势1. 精度高相比传统的脉冲计数方法,电子换向方法能够更精确地确定转子的位置。
无位置传感器无刷直流电机转子位置检测传统的获取无刷直流电机转子位置信息的方法是采用电子式、机电式、光电式等位置传感器直接测量,如霍尔效应器件(HED),光学编码器,旋转变压器等位置传感器。
然而,这些位置传感器有的分辨率低或运行特性不好,有的对环境条件敏感,如震动、潮湿和温度变化等都会使性能下降,使得整个传动系统的可靠性难以得到保证。
传感器还大大增加了电气连接线数目,给抗干扰设计带来一定困难。
略去无刷电动机的位置传感器而用其他方法检测转子的位置,是一项具有实际意义的工作,能进一步扩大无刷直流电动机的应用领域和生产规模。
无位置传感器无刷直流电机,顾名思义,就是省去了无刷直流电机中的转子位置传感器。
虽然,无位置传感器无刷直流电机不需要直接安装转子位置传感器,但在电机运转过程中,控制电机换相的转子位置信号还是需要的,因此,无位置传感器无刷直流电机控制技术的关键是架构一转子位置信号检测电路,通过软硬件间接获得可靠的转子位置信号。
就无刷直流电动机而言,目前国内外对无位置传感器无刷直流电动机做了不少的研究,提出了不少转子位置检测方法,按其原理分为以下几种:(1)利用反电势检测转子位置;(2)利用绕组电感检测转子位置;(3)利用瞬时电压的方程检测转子位置;(4)利用绕组端电压检测转子位置;(5)利用相电流检测转子位置;下面对几种典型无位置检测的方法进行比较1.1利用电机反电势信号控制电机的换向有三种检测电机反电势的方法:零交叉法、锁相环法和反电势积分法:a)零交叉法:当检测到未导通项绕组的反电势过零时,触发定时器,在定时时间结束时,逆变器实现下一个相序的换向。
该方法简单,价格便宜。
缺点是静止或低速时反电势信号为零或很小,难以准确检测绕组的反电势,因而无法得到有效的转子位置信号,系统低速性能比较差;另外,为消除干扰信号,需要对反电势信号进行深度滤波,这样造成与电机转速有关的信号相移,为了保证正确的换相需要对此相移进行补偿。
电机霍尔传感器原理
电机霍尔传感器是一种广泛应用于电动机控制系统中的传感器。
它利用霍尔效应原理来检测电机的位置和转速。
霍尔效应是指当导电材料中有电流通过时,在垂直于电流方向上会产生一种电势差。
这种电势差称为霍尔电压,它与电流的大小和导电材料中的磁场强度成正比。
电机霍尔传感器通常由霍尔元件、磁场发生器和信号处理器组成。
霍尔元件通过与电机旋转的磁场相互作用,产生一个与旋转角度相关的霍尔电压。
磁场发生器则是产生旋转磁场的部分,通常由一个永磁体制成。
信号处理器负责接收霍尔电压,并将其转换为相应的位置和转速信号。
电机霍尔传感器的优点是体积小、响应速度快、精度高、可靠性好。
它广泛应用于交流电机、直流电机等各种类型的电机控制系统中。
通过使用电机霍尔传感器,可以准确地检测电机的位置和转速,实现精确的电机控制。
总之,电机霍尔传感器利用霍尔效应原理检测电机的位置和转速。
由霍尔元件、磁场发生器和信号处理器组成,具有体积小、响应速度快、精度高、可靠性好等特点。
它在电机控制系统中有着广泛的应用。
霍尔无刷电机的原理和应用1. 霍尔无刷电机的原理霍尔无刷电机是一种通过电子控制器控制转子位置的电动机。
它采用霍尔传感器感知转子位置,并通过电子换相器将电流传送到不同的绕组,从而实现电机的转动。
1.1 霍尔效应霍尔效应是指当电流通过导体的时候,在垂直于电流和磁场方向的方向上产生电势差的现象。
在霍尔无刷电机中,霍尔传感器利用这一效应来感知转子位置。
1.2 无刷电机的结构无刷电机由定子和转子组成。
定子上有若干相间的绕组,转子上有永磁体。
霍尔传感器则被安装在定子上,可以感知转子的位置。
1.3 霍尔无刷电机的工作原理当转子运动时,霍尔传感器会感知转子磁场的变化,并向电子控制器发送信号。
电子控制器会根据这些信号,确定电流应该传送到哪个绕组上。
通过不断的换向,电机实现了转子的平稳转动。
2. 霍尔无刷电机的优势•高效率:无刷电机没有碳刷,能够消除电刷摩擦带来的能量损失,因此拥有更高的效率。
•高功率密度:由于无刷电机的转子结构相对轻巧,其功率密度较高。
•高速度范围:无刷电机的转速范围广,可以达到较高的转速。
•高可靠性:无刷电机由于没有碳刷的磨损,故寿命较长,并且能够在恶劣环境下工作。
3. 霍尔无刷电机的应用3.1 工业领域•无人机:霍尔无刷电机因其高功率密度和高效率,被广泛应用于无人机领域。
可用于提供动力和控制无人机的姿态。
•机床:霍尔无刷电机能够提供高速、高精度的转动,适用于机床的进给和主轴驱动。
3.2 家用电器•厨房电器:霍尔无刷电机能够提供高速搅拌和搅打功能,被应用于搅拌机、搅拌器等厨房电器中。
•吸尘器:霍尔无刷电机拥有高效率和高吸力,适用于家用吸尘器,提供较长的工作时间和较强的吸力。
3.3 汽车领域•电动汽车:霍尔无刷电机是电动汽车的重要部件之一,能够提供高效率和高性能。
其高速范围和可靠性使得其在电动汽车中得到广泛应用。
•刹车系统:霍尔无刷电机能够提供高速响应的转矩输出,可用于电动刹车系统。
4. 总结霍尔无刷电机凭借其高效率、高功率密度、高可靠性和高速度范围等优势,在工业领域、家用电器和汽车领域等多个领域得到了广泛应用。
第36卷第5期2018年9月西安航空学院学报J o u r n a l o fX i ᶄa nA e r o n a u t i c a lU n i v e r s i t yV o l .36N o .5S e p .2018收稿日期:2018G06G07作者简介:杨凡(1989-),女,陕西延安人,助理工程师,主要从事电机本体设计㊁测试等理论与工程技术研究.图解霍尔位置偏离对直流无刷电机性能的影响杨㊀凡,惠㊀旋,李敏哲,权艳娜,拓亚玲(西安航天动力测控技术研究所微特电机事业部,西安710025)摘㊀要:霍尔位置传感器作为无刷直流电动机组件,主要作用是检测转子相对于定子绕组的位置,并输出信号控制电机绕组以 两相导通星型三相六状态 方式工作.霍尔位置偏离对电机的输出性能会造成一定的影响.以图解方式讨论霍尔位置偏离导致的电流超前导通和滞后导通时电机输出性能的差异,并采用有限元分析软件A n s y s 进行仿真,以验证霍尔元件位置偏离对电机转矩脉动和转速的影响.关键词:霍尔元件;永磁直流无刷电机;反电势;转矩波动中图分类号:TM 33㊀㊀文献标识码:A ㊀㊀文章编号:1008G9233(2018)05G0065G05㊀㊀直流无刷电动机是小型机电一体化产品,为了发挥电机本体最佳性能,驱动控制方式需和电机本体参数相匹配,而霍尔位置传感器在驱动控制中承担着重要的角色,因为其决定了电机本体绕组导通和关闭的时刻,直接影响电机的运行状态和性能发挥.1㊀问题描述在直流无刷电动机中,为了获得正反转对称的输出性能,霍尔元件一般放置在各相绕组磁势轴线的位置[1G4],本文中称作标准位置.而在电机产品的实际生产过程中,霍尔元件的位置固定一般有两种方式:一种是机械式提前固定在各相绕组磁势轴线位置;一种是通过调试达到正反转空载运行对称时固定的位置.前一种方式在很大程度上会因为安装误差导致霍尔元件偏离标准位置,而后一种方式在很大程度上会因为调试误差导致霍尔元件偏离标准位置,并且两种方式有共同的缺点,即霍尔元件位置的固定都是以电机空载运行为依据,没有考虑过电机的负载运行,电机在带载运行时,霍尔元件的最佳安装位置会与空载运行时有差别[5G6].本文通过分析霍尔元件位置偏离对电机性能的影响,从而根据电机输出需要的关键参数反馈规划霍尔元件的位置,达到霍尔元件位置的专属配置,使得控制与电机本体参数相匹配,使电机的输出和负载达到最优匹配.2㊀霍尔元件位置偏离对电机性能的影响2.1㊀直流无刷电机两相导通星型三相六状态 工作时的反电势㊀㊀对于两相导通星型三相六状态 工作方式下的永磁直流无刷电动机,一个磁状态为60ʎ电角度.霍尔元件放置在标准位置时换向过程中的反电势波形如图1所示.图1㊀标准换向过程中的反电势波形图1中,将A 相反电势过零点定义为0ʎ,标准66㊀换向点在A 相反电势过零点30ʎ,此处A 相开始正向导通.图1中所示的是A B 导通60ʎ和A C 导通60ʎ时对应的反电势波形.B 相和C 相正向导通和A 相导通时反电势波形保持一致,只是在相位上对应滞后120ʎ和240ʎ.当霍尔元件位置偏离标准位置时,A 相开始正向导通的时刻会超前或者滞后.滞后导通换向过程中的反电势波形如图2所示,霍尔元件偏离标准位置导致A 相正向导通滞后角度为β.通过对比分析,在A 相正向导通120ʎ的扇区内,反电势对比标准位置导通时有所减小,减小的程度在图2中用较密的阴影区域表示,并且β值越大,反电势减小的程度越大.超前导通换向过程中的反电势波形如图3所示,霍尔元件偏离标准位置导致A 相正向导通超前角度为β.采取同样的方式进行对比分析,反电势对比标准位置导通时有所减小,减小的程度在图3中用较密的阴影区域表示.其他两相导通时分析方法类同.图2㊀滞后导通换向过程中的反电势波形图3㊀超前导通换向过程中的反电势波形由此可见,霍尔元件位置偏离标准位置会引起120ʎ扇区内的反电势减少,偏离带来超前或滞后导通的角度用β表示,并且0ʎɤβɤ30ʎ.β之所以取在此范围内,是因为在此电角度范围内,霍尔元件偏离对电机产生的影响不至于太畸形,分析的结果具有一定的借鉴意义.因此,霍尔元件位置偏离标准位置对应的电机反电势系数会减小,在同样电压驱动下,电机的空载转速会升高.2.2㊀直流无刷电机两相导通星型三相六状态 工作时的转矩分析㊀㊀对于两相导通星型三相六状态 工作方式下的永磁直流无刷电动机,一个磁状态为60ʎ电角度,分析过程以A B 导通60ʎ进行,其他磁状态过程类似.标准换向过程中的磁势变化如图4所示.此时绕组A B 通电,定子合成磁势轴线F a 和转子合成磁势轴线F b 夹角为120ʎ电角度(F r 是霍尔元件在标准位置时,转子磁势轴线相对于定子磁势轴线的位置).在转子旋转0ʎ~30ʎ扇区内,磁势F a 的d 轴分量F d 表现为去磁作用,并且去磁作用逐渐减弱,q 轴分量F q 表现为交磁作用,并且交磁作用逐渐增加.在转子旋转30ʎ~60ʎ扇区内,磁势F a 的d 轴分量F d 表现为增磁作用,并且增磁作用逐渐增强,q轴分量F q 表现为交磁作用,并且交磁作用逐渐减弱.分析图4中的阴影区域可以得出,0ʎ~30ʎ扇区和30ʎ~60ʎ扇区,定子磁势F a 直轴分量的去增磁作用和交轴分量的交磁作用变化呈现出对称状态,使得电机在正反转运行过程中转速对称,转矩平稳.图4㊀标准换向过程中的磁势变化当霍尔元件偏离标准位置时,定子磁势轴线和转子磁势轴线的夹角会偏离120ʎ.超前导通换向过程中的磁势变化如图5所示,表示霍尔元件偏离标准位置导致A B 相绕组通电超前β时磁势的变化.此时F a 和F b 的夹角相比标准位置时偏离β,呈现为120ʎ+β电角度.在转子旋转0ʎ~30ʎ+β扇区内,磁势F a 的d 轴分量F d 表现为去磁作用,并西安航空学院学报第36卷67㊀且去磁作用逐渐减弱,q 轴分量F q 表现为交磁作用,并且交磁作用逐渐增加.在转子旋转的30ʎ+β~60ʎ扇区内,磁势F a 的d 轴分量F d 表现为增磁作用,并且增磁作用逐渐增强,q 轴分量F q 表现为交磁作用,并且交磁作用逐渐减弱.分析图5中的阴影区域可以得出,0ʎ~30ʎ+β扇区和30ʎ+β~60ʎ扇区,定子磁势F a 直轴分量的去增磁作用和交轴分量的交磁作用变化呈现出非对称状态,去磁作用占的比重大,交磁变化增强过程占的时间长,一个磁状态60ʎ扇区内的非对称状态会导致电机运行过程中转矩波动变大.图5㊀超前导通换向过程中的磁势变化当霍尔元件偏离标准位置时,定子磁势轴线和转子磁势轴线的夹角会偏离120ʎ.滞后导通换向过程中的磁势变化如图6所示,表示霍尔元件偏离标准位置导致A B 相绕组通电滞后β时磁势的变化.此时F a 和F b 的夹角相比标准位置时偏离β,呈现为120ʎGβ电角度.在转子旋转0ʎ~30ʎGβ扇区内,磁势F a 的d 轴分量F d 表现为去磁作用,并且去磁作用逐渐减弱,q 轴分量F q 表现为交磁作用,并且交磁作用逐渐增加.在转子旋转的30ʎGβ~60ʎ扇区内,磁势F a 的d 轴分量F d 表现为增磁作用,并且增磁作用逐渐增强,q 轴分量F q 表现为交磁作用,并且交磁作用逐渐减弱.分析图6中的阴影区域可以得出,0ʎ~30ʎGβ扇区和30ʎGβ~60ʎ扇区,定子磁势F a 直轴分量的去增磁作用和交轴分量的交磁作用变化呈现出非对称状态,增磁作用占的比重大,交磁变化减弱过程占的时间长,一个磁状态60ʎ扇区内的非对称状态会导致电机运行过程中转矩波动变大.图6㊀滞后导通换向过程中的磁势变化由此可见,当霍尔元件偏离标准位置时,会导致一个磁状态中电机运行不对称,这种不对称运行状态在每个磁状态下是类同的.因此电机连续运行时,在整个时间轴上都是不对称的,表现为转矩波动变大.并且假如霍尔位置偏离导致电机在正向旋转时超前导通,则反向旋转时会滞后导通,因此电机正反转会呈现出不对称的运行状态.进一步分析霍尔位置偏离时转矩值大小的变化情形,如图7~图9所示.图7㊀标准换向过程中的转矩分析图8㊀滞后导通换向过程中的转矩分析第5期杨凡,等:图解霍尔位置偏离对直流无刷电机性能的影响68㊀图9㊀超前导通换向过程中的转矩分析通过分析一个磁状态过程,可以发现电机在运行过程中的转矩大小近似可用定子磁势交轴分量F q 与转子磁势Fb 和定子磁势直轴分量F d 合成相量的乘积表示.假设定子磁势值为a ,转子磁势值为b ,则当霍尔元件为标准位置时一个磁状态中转矩的大小可以用公式(1)近似表示.T =ʏ120ʎ60ʎa s i n θ(b -a c o s θ)=ʏ120ʎ60ʎab s i n θ-12a 2s i n 2θ(1)T =ʏ120ʎ+β60ʎ+βa s i n θ(b -a c o s θ)=ʏ120ʎ+β60ʎ+βa b s i n θG12a 2s i n 2θ(2)T =ʏ120ʎ-β60ʎ-βa s i n θ(b -ac o s θ)=ʏ120ʎ-β60ʎ-βa b s i n θ-12a 2s i n 2θ(2)公式(2)为绕组滞后导通β时一个磁状态中转矩的大小.公式(3)为绕组超前导通β时一个磁状态中转矩的大小.并且,绕组超前导通或者滞后导通,定子磁势的直轴分量F d 在一个磁状态中的净变化量不等于0,这一部分会引起绕组电流增加[7],因而此时F a 的值a 会有所增大.分析图7~图9,当霍尔元件偏离标准位置时,转矩值的波动会受很多因素的影响,一方面反电势系数减小后转矩系数也相应地减小,另一方面绕组电流增加,用来补偿直轴分量的变化量,因此转矩值的变化取决于哪一方面的因素占主导地位.3㊀有限元仿真为验证以上理论分析,以额定电压为27V ㊁额定转速为5000r p m ㊁额定转矩为10m N m 的表贴式径向励磁永磁直流无刷电动机为例,利用有限元分析软件进行了仿真,仅改变导通初始时刻㊁转子磁势轴线夹角来模拟霍尔元件位置偏离导致电流导通超前或者滞后带来的影响,研究电机性能的差异.图10为不同导通角度情形下电机本体的机械特性曲线.从图10中可以看出,将超前导通20ʎ㊁滞后导通20ʎ与标准导通相比较,可以看出霍尔元件偏离都会引起空载转速的升高.根本原因在于超前或者滞后导通都会引起电机本体参数反电势系数的降低.图11为不同导通情形下电机本体的反电势系数,负角度代表滞后导通角度,正角度代表超前导通角度,0角度代表标准导通情形.在同样电压驱动下,空载转速相比会升高.图10㊀不同导通情形下电机机械特性曲线图11㊀不同导通情形下反电势系数图12为恒转速控制方式下,不同导通情形下电机的转矩波动.以图12中超前导通18ʎ㊁滞后导通18ʎ为例可以看出,超前导通或滞后导通电机转矩值会升高,转矩波动会变大,局部出现尖波.图12㊀不同导通情形下的转矩波动4㊀结语本文通过图解理论分析和有限元仿真分析软件验证的方式对表贴式直流无刷电动机中霍尔元件偏离后对电机特性带来的影响做了研究分析.西安航空学院学报第36卷69㊀可以看出,霍尔元件位置偏离导致绕组电流导通时刻超前或者滞后会引起空载转速的升高㊁转矩脉动的增大和转矩值的改变,本文例子中的转矩值是增大的.由此可见,霍尔元件位置偏离在一定程度上会引起输出功率的增加,增加的附加条件为输入电流的增大,部分增加的电流用来补偿霍尔元件位置偏离带来的直轴分量净磁通的增加,最终体现为效率的降低.如果着重考虑电机产品的输出功率,可以通过仿真分析软件,以产品的关键使用参数为反馈,进行霍尔元件位置的专属配置,使电机输出与所需特性相符合.参考文献[1]王萍,王正茂,姚刚,等.无刷直流电机中霍尔元件的空间配置[J].微电机,2003,36(6):16G18.[2]谭建成.多极分数槽集中绕组无刷电机霍尔传感器位置确定方法分析[J].微电机,2008,41(6):57G61.[3]陈政,韦剑强,何桂仙.永磁无刷电动机霍尔片的定位方法[J].微电机,2010,43(10):98G101.[4]刘吉超,李巴津,伍春生.无刷直流电机用霍尔传感器定位方法[J].微电机,2014,47(7):59G62.[5]韩汇文,祝长生.表贴式永磁电机电枢反应磁场的子域模型[J].浙江大学学报(工学版),2014,48(9):1682G1689.[6]秦虎,周醒夫,何金泽,等.无刷直流电动机电枢反应对转矩脉动的影响与分析[J].微特电机,2014,(42)5:17G19,29.[7]周俊杰,窦满峰,董蓉.霍尔位置偏移对无刷直流电动机性能的影响[J].微特电机,2010(7):19G21.[责任编辑㊁校对:李㊀琳]D i a g r a m m a t i z i n g t h e I m p a c t o fH a l lE l e m e n t sD e v i a t i o no nB r u s h l e s sD C M o t o rY A N GF a n,X IX u a n,L IM i nGz h e,Q U A NY a nGn a,T U OY aGl i n g(S p e c i a lM i c r oGm o t o rB U,X iᶄa nA e r o s p a c eP r o p u l s i o nT e s t i n g T e c h n o l o g y R e s e a r c h I n s t i t u t e,X iᶄa n710025,C h i n a)A b s t r a c t:A s o n e o f t h em o s t i m p o r t a n t c o m p o n e n t p a r t so fB r u s h l e s sDC m o t o r s,H a l l e l e m e n t i su s e d t o d e t e c t t h e p o s i t i o no f t h e r o t o r r e l a t i v e t o t h e s t a t o r,t h e n p r o v i d e s i g n a l t o c o n t r o lm o t o rw i n d i n g o p e r a t e d i n a"t w oGp h a s e c o n d u c t i o n s t a r t h r e eGp h a s e s i x s t a t e"m o d e.H a l l e l e m e n tᶄp o s i t i o nd e v i a t i o nd o e s h a v e a n e f f e c t o n t h e o u t p u t p r o p e r t i e s o f t h em o t o r.T h i s a r t i c l e i l l u m i n a t e s t h e d i f f e r e n c e o fm o t o rᶄs p r o p e r t i e s b eGt w e e n c u r r e n t p h a s e a d v a n c e s i t u a t i o n s a n d c u r r e n t p h a s e l a g s i t u a t i o n s c a u s e db y H a l l e l e m e n t sd e v i a t i o n g r a p h i c a l l y.A c c o r d i n g t o t h e s i m u l a t i o na n a l y s i s o f f i n i t e e l e m e n t a n a l y s i s s o f t w a r eA N S Y S,t h e c h a n g e o f m e c h a n i c a l p r o p e r t i e s o f t h em o t o r c a u s e db y H a l l e l e m e n t s d e v i a t i o na r e a n a l y z e d a c c o r d i n g l y.K e y w o r d s:H a l l e l e m e n t;P M B L D C;E M F;t o r q u e r i p p l e第5期杨凡,等:图解霍尔位置偏离对直流无刷电机性能的影响。
电动车(BLDC)是一种无刷直流电动机,采用霍尔传感器和反电势电压波形来控制其运行。
本文将分别从霍尔和反电势电压波形两个方面对BLDC进行深入探讨。
一、霍尔传感器1. 霍尔效应原理霍尔效应是指当导电材料的电流通过时,垂直于电流方向的磁场会产生一定的差电位。
在BLDC中,霍尔传感器利用这一原理来检测转子位置和转速。
2. 霍尔传感器的作用霍尔传感器能够通过检测磁场的变化来确定转子的位置,从而控制相序的切换和电流的正常流动。
它是BLDC电机中不可或缺的部件,直接影响到电机的运行效果和稳定性。
3. 霍尔传感器对电压波形的影响通过霍尔传感器检测到的转子位置,经过控制器的处理和计算,会形成一定的电压波形输出。
这些电压波形的形状和频率直接影响到整个BLDC系统的运行状态和效率。
二、反电势电压波形1. 反电势电压的产生原理反电势是指在电动机转子转动时,定子上感应出的电动势。
在BLDC 中,反电势可以通过旋转定子和磁场的相互作用来产生。
2. 反电势对电机的影响反电势是BLDC电机中的一个重要参数,它可以反映电机的运行状态和负载情况。
通过反电势的大小和频率,可以判断电机的转速和负载情况,为电机的控制和调节提供重要参考。
3. 反电势电压波形的特点反电势电压波形是一种随转子转动而变化的波形,它的频率和幅值与转速和负载密切相关。
通过分析反电势电压波形,可以了解电机的运行状况,并据此进行控制和调节。
结论BLDC电机的运行受到霍尔和反电势电压波形的双重影响,两者共同决定了电机的性能和效率。
通过深入研究和分析这两个方面,可以更好地理解BLDC电机的工作原理和运行特性,为电机的设计和控制提供重要参考。
未来,随着技术的不断发展和进步,相信BLDC电机将在各个领域得到更广泛的应用和推广。
鉴于BLDC(无刷直流电机)在电动车和工业应用等领域的重要性日益增强,对于霍尔和反电势电压波形的研究也变得愈发重要。
本文将继续深入探讨这两方面对BLDC电机的影响,并分析它们在电动车和工业领域的应用与发展。
无刷直流电机的组成及工作原理2.1 2.1 引言引言直流无刷电动机一般由电子换相电路、转子位置检测电路和电动机本体三部分组成,电子换相电路一般由控制部分和驱动部分组成,电子换相电路一般由控制部分和驱动部分组成,而对转子位置的检测一而对转子位置的检测一般用位置传感器来完成。
工作时,控制器根据位置传感器测得的电机转子位置有序的触发驱动电路中的各个功率管,序的触发驱动电路中的各个功率管,进行有序换流,进行有序换流,进行有序换流,以驱动直流电动机。
以驱动直流电动机。
以驱动直流电动机。
下文从下文从无刷直流电动机的三个部分对其发展进行分析。
2.2 无刷直流电机的组成无刷直流电机的组成2.2.1 电动机本体电动机本体无刷直流电动机在电磁结构上和有刷直流电动机基本一样,但它的电枢绕组放在定子上,转子采用的重量、简化了结构、提高了性能,使其可*性得以提高。
无刷电动机的发展与永磁材料的发展是分不开的,磁性材料的发展过程基本上经历了以下几个发展阶段:铝镍钴,铁氧体磁性材料,钕铁硼(NdFeB )。
钕铁硼有高磁能积,它的出现引起了磁性材料的一场革命。
它的出现引起了磁性材料的一场革命。
第三代钕铁硼永磁材料的第三代钕铁硼永磁材料的应用,进一步减少了电机的用铜量,促使无刷电机向高效率、小型化、节能的方向发展。
向发展。
目前,目前,为提高电动机的功率密度,为提高电动机的功率密度,为提高电动机的功率密度,出现了横向磁场永磁电机,出现了横向磁场永磁电机,出现了横向磁场永磁电机,其定子齿槽与电枢其定子齿槽与电枢其定子齿槽与电枢 线圈在空间位置上相互垂直,线圈在空间位置上相互垂直,电机中的主磁通沿电机轴向流通,电机中的主磁通沿电机轴向流通,电机中的主磁通沿电机轴向流通,这种结构提高了这种结构提高了气隙磁密,能够提供比传统电机大得多的输出转矩。
能够提供比传统电机大得多的输出转矩。
该类型电机正处于研究开发该类型电机正处于研究开发阶段。
阶段。
永磁无刷直流电机专辑 无刷直流电动机中的霍尔位置传感器蔡耀成(常州微特电机总厂,江苏常州213011)Ha ll Positi on Sen sors i n Brushless DC M otorCai Y aocheng(Changzhou M icro&SpecialM otors General Factory,J iangsu Changzhou213011) 【摘 要】 无刷直流电动机中使用的位置传感器有许多种类,而霍尔位置传感器因具有结构简单,安装方便灵活,易于机电一体化等优点,目前已越来越得到广泛的应用。
该文对这类传感器的结构、工作原理、设计原则等方面做较详细的介绍。
【关键词】 无刷直流电动机 霍尔位置传感器中图分类号:T M38 文献标识码:A文章编号:1004-7018(1999)05-0014-05【Abstract】 T here are m any positi on sens ors used in brush less DC motors.Featuring si m p le structure,easy to mount and m echano-electronized,H all sens ors are becom ing more and more w idely used.T h is article w ill give a detailed introducti on to constructi on,operati on and design p rinci p les of these H all sens ors.【Keywords】 brush less motor H all positi on sens or1前 言位置传感器是组成无刷直流电动机系统的三大部分之一,也是区别于有刷直流电动机的主要标志。
其作用是检测主转子在运动过程中的位置,将转子磁钢磁极的位置信号转换成电信号,为逻辑开关电路提供正确的换相信息,以控制它们的导通与截止,使电动机电枢绕组中的电流随着转子位置的变化按次序换向,形成气隙中步进式的旋转磁场,驱动永磁转子连续不断地旋转。
位置传感器的种类很多,有电磁式、光电式、磁敏式等。
它们各具特点,然而由于磁敏式霍尔位置传感器具有结构简单、体积小、安装灵活方便、易于机电一体化等优点,目前得到越来越广泛的应用。
本文将对这种位置传感器的结构原理,构成原则等作一分析。
2霍尔传感器磁敏式传感器是一种以磁场激发的磁敏元器件,它是名目繁多的传感器中重要的一个家族。
磁敏传感器的种类很多,有磁阻元件、磁敏二极管、磁敏三极管、磁抗元件、方向性磁电元件、霍尔元件、霍尔集成电路,以及利用这些元器件二次集成的磁电转换组件。
其中以霍尔效应原理构成的霍尔元件、霍尔集成电路、霍尔组件统称为霍尔效应磁敏传感器,简称霍尔传感器。
2.1半导体中的霍尔效应1879年美国霍普金斯大学的霍尔(E.H.H all)发现,当磁场中的导体有电流通过时,其横向不仅受到力的作用,同时还出现电压。
这个现象后来被称为霍尔效应。
随后人们又发现,不仅是导体,而且在半导体中也存在霍尔效应,并且霍尔电势更明显,这是由于半导体有比导体更大的霍尔系数的缘故。
众所周知,任何带电粒子在磁场中沿着与磁力线垂直的方向运动时,都要受到磁场的作用力,该力称为洛伦兹力,其大小可用下式表示:F=qvB(1) 式(1)表明,洛伦兹力的大小与粒子的电荷量q,粒子的运动速度v及磁感应强度B成正比。
图1是在一长方形半导体薄片上加上电场E x 后的情况。
在没有外加磁场时,电子沿外加电场E x 的相反方向运动,形成一股沿电场方向的电流I,如图1a所示。
当加以与外电场垂直的磁场B时,运动着的电子受到洛伦兹力的作用将向左边偏移,并在该侧面形成电荷积累,如图1b所示。
由于该电荷的积累产生了新的电场,称为霍尔电场。
该电场使收稿日期:19990802电子在受到洛伦兹力的同时还受到与它相反的电场力的作用。
随着半导体横向方向边缘上的电荷积累不断增加,霍尔电场力也不断增大。
它逐渐抵消了洛伦兹力,使电子不再发生偏移,从而使电子又恢复到原有的方向无偏移地运动,达到新的稳定状态,如图1c 所示。
然而,与无磁场时不同的是,在半导体两侧产生了一电场E H ,这个霍尔电场的积分,就在元件两侧间显示出电压,成为霍尔电压,这就是所谓的霍尔效应。
图1 半导体中电子运动的状态示意图图2 霍尔效应原理根据霍尔效应的原理,可制成如图2所示结构的半导体元件霍尔元件。
对于一定的半导体薄片,其霍尔电动势E 可用下式表示:E =R H I H B d(2)R H =3Π8ΘΛ(3)式中:R H霍尔系数(m 3 C );I H 控制电流(A );B磁感应强度(T );d薄片的厚度(m );Θ材料电阻率(8 m );Λ材料迁移率(m 2(V s )。
若式(2)中常数项用K H 表示,则有E =K H I H B(4)式中:K H霍尔元件的灵敏度[mV(mA T )],K H =R Hd。
当磁感应强度B 和霍尔元件的平面法线成一角度Η时,实际上作用于霍尔元件的有效磁场是其法线方向的分量,即B cos Η,此时霍尔电势为:E =K H I H B cos Η(5)上述霍尔元件所产生的电动势很低,在应用时往往要外接放大器,很不方便。
随着半导体集成技术的发展,将霍尔元件与半导体集成电路一起制作在同一块硅外延片上,这就构成了霍尔集成电路。
2.2霍尔传感器的分类2.2.1按结构分类霍尔传感器按其结构可分为霍尔元件、霍尔集成电路和霍尔功能组件三大类。
2.2.2按功能分类霍尔传感器按其功能和应用可分为线性型、开关型、锁定型三种。
(a )线性型 线性型传感器是由电压调整器、霍尔元件、差分放大器、输出级等部分组成,其功能方块图如图3所示。
输入为线性变化的磁感应强度,得到与磁感应强度成线性关系的输出电压。
可用于磁场测量、非接触测距、黑色金属检测等。
其输出特性曲线如图4所示。
图3 功能方框图图4 磁电转换特性曲线(b )开关型 开关型传感器是由电压调整器、霍尔元件、差分放大器、施密特触发器和输出级等部分组成。
输入为磁感应强度,输出为数字信号。
图5是其输出特性曲线。
这种开关的导通和截止过程只和外界磁感应强度的大小有关,而不需要磁场极性的变换。
它的磁滞回线相对于零磁场轴是非对称的。
图6显示了这种开关电路在交变磁场作用下的输出特性。
(c )锁定型 锁定型传感器同样也是由电压调整器、霍尔元件、差分放大器、施密特触发器、输出级等五部分组成,其功能方框图如图7所示。
锁定型传感器实质上也是一种开关型器件,与一般霍尔开关的差别在于,它是由双磁极激发的。
由于双磁极霍尔锁定器的磁滞回线相对于零磁场图5 输出特性图6 交变磁场下的输出特性图7 锁定型传感器功能方框图轴是对称的,在交变磁场作用下输出波形可得到1 1的占空比,且不受外界温度及交变磁场峰值大小的影响。
图8是双磁极霍尔锁定器的输出特性。
从图中可以看到其磁滞回线相对于零磁场轴是对称的。
图9显示了这种霍尔锁定器在交变磁场作用下的输出特性,其输出波形的占空比为1 1。
图8 输出特性图9 交变磁场下的输出特性霍尔锁定器的基本工作过程是:当外界磁场方向为正时,霍尔元件的差分输出电压为正,这个电压经放大器放大后作为触发器的触发信号。
当信号电压随外界磁感应强度的增强而增加,达到触发器导通电压阈值时,电路的输出随之由高电平变为低电平,此后,如果外界磁感应强度继续增加,触发器维持导通状态不变。
由于触发器的导通和截止电压阈值的设计是对称的,所以当外界磁感应强度减弱时,触发器仍维持导通状态。
只有当外界磁场改变极性并达到一定强度时,霍尔元件输出的负触发信号达到触发器的截止阈值电压,触发器才由导通跃变为截止,因而磁场的极性每变换一次,电路的输出就完成一次开关转换。
3霍尔位置传感器3.1位置传感器的结构霍尔位置传感器和电动机本体一样,也是由静止部分和运动部分组成,即位置传感器定子和位置传感器转子。
其转子与电机主转子一同旋转,以指示电机主转子的位置,既可以直接利用电动机的永磁转子,也可以在转轴其他位置上另外安装永磁转子。
定子是由若干个霍尔元件,按一定的间隔,等距离地安装在传感器定子上,以检测电机转子的位置。
图10为霍尔位置传感器的结构示意图。
图10 霍尔位置传感器结构示意图3.2位置传感器的基本功能位置传感器的基本功能是在电动机的每一个电周期内,产生出所要求的开关状态数。
也就是说电动机传感器的永磁转子每转过一对磁极(N 、S 极)的转角,就要产生出与电机逻辑分配状态相对应的开关状态数,以完成电动机的一个换流全过程。
如果转子充磁的极对数越多,则在360°机械角度内完成该换流全过程的次数也就越多。
3.3位置传感器的构成原则要构成一个霍尔位置传感器必须满足以下两个条件:(a )位置传感器在一个电周期内所产生的开关状态是不重复的,每一个开关状态所占的电角度应相等。
(b )位置传感器在一个电周期内所产生的开关状态数应和电动机的工作状态数相对应。
如果位置传感器输出的开关状态能满足以上条件,那么总可以通过一定的逻辑变换将位置传感器的开关状态与电动机的换向状态对应起来,进而完成换向。
然而,对于每一种组合的霍尔位置传感器并非都能满足上述要求的。
先以一个由相互间隔为60°电角度的三个霍尔元件A 、B 、C所组成的霍尔位置传感器为例,图11为霍尔元件输出波形组合图,表1是霍尔元件的输出状态表。
图11 霍尔元件输出波形组合图表1 霍尔元件输出状态霍尔元件状态序列AB C 110021103111401150016 由前面所述的锁定型霍尔开关元件的原理可知,在一个电周期内,即转子的一对磁极转角内,当其感受N 及S 二个不同极性磁场的作用时,将呈现出“高电平”及“低电平”(或者相反)两个不同的状态,这两个不同的状态所占的电角度相等,各为180°。
把三个相互错开60°电角度的波形组合在一起,就可以看出究竟能产生多少开关状态。
从图11及表1可以看出,这种组合的霍尔位置传感器能产生六个不同的开关状态,且所占的电角度都相等,各为60°,这样的传感器能满足上述要求。
下面再以一个由相互间隔36°电角度的四个霍尔元件a 、b 、c 、d 所组成的霍尔位置传感器为例。
从图12及表2可以看到,这样的位置传感器尽管能产生十个开关状态,但其中有两个是重复的。
换句话说,这个传感器只能产生八个开关状态,但其中有两个所占的电角度与其它的不相等,因此这种组合的霍尔位置传感器就不能满足上述要求。
图12 霍尔元件输出波形组合图表2 霍尔元件输出状态霍尔元件状态序列a b c d 110002110031110411115111160111700118000190000103.4位置传感器的设计霍尔位置传感器的设计可分为定子设计和转子设计。