自适应控制的分类_自适应控制的主要类型
- 格式:doc
- 大小:22.00 KB
- 文档页数:6

《无模型自适应控制方法综述》在现代控制领域中,无模型自适应控制方法因其独特的优势和广泛的应用前景而备受关注。
随着科技的不断发展和工业生产等领域对控制性能要求的日益提高,无模型自适应控制方法逐渐成为解决复杂系统控制问题的重要手段之一。
本文旨在对无模型自适应控制方法进行全面而系统的综述,深入探讨其基本原理、主要类型、特点以及在实际应用中的成果和挑战。
一、概述控制系统在工业生产、航空航天、交通运输、自动化等众多领域中起着至关重要的作用。
传统的控制方法往往基于对被控对象精确的数学模型建立,但在实际系统中,由于系统的复杂性、不确定性以及建模误差等因素的存在,很难获得准确且精确的数学模型。
这就促使了无模型自适应控制方法的产生和发展。
无模型自适应控制方法不依赖于被控对象的精确数学模型,而是通过对系统的上线观测和学习,不断调整控制策略,以适应系统的变化和不确定性,从而实现对被控对象的良好控制。
二、无模型自适应控制方法的基本原理无模型自适应控制方法的基本原理可以概括为以下几个关键步骤:(一)系统上线观测与状态估计通过传感器等手段对被控系统的状态变量进行实时监测和采集,获取系统的当前状态信息。
然后利用合适的估计方法,如卡尔曼滤波等,对系统的状态进行估计,以获得更准确的系统状态表征。
(二)控制律设计基于估计的系统状态,设计相应的控制律。
控制律的设计通常是根据一定的性能指标和控制策略进行优化,以实现对被控系统的期望控制效果。
(三)自适应调整根据系统的实际运行情况和估计误差,不断调整控制律中的参数或结构,使控制系统能够自适应地适应系统的变化和不确定性。
这种自适应调整可以是基于模型的自适应,也可以是基于数据驱动的自适应等方式。
通过以上基本原理的循环迭代,无模型自适应控制方法能够逐步逼近系统的最优控制状态,实现对被控系统的有效控制。
三、无模型自适应控制方法的主要类型(一)模型参考自适应控制(MRAC)MRAC 是无模型自适应控制中最经典的一种方法。


第三讲 自适应控制自适应控制自适应控制也是一种鲁棒控制方法,前面所讲的所有鲁棒控制(包括变结构控制),它们的基本思想是基于被控对象与内环控制的不匹配及不确定性的最坏情形的估计而展开设计的,它们的内环控制律是固定的,外环控制增益根据不确定性的估计来设定;而自适应控制的基本思想是根据一些在线算法改变控制律中的增益值或其他参数,控制器在操作过程中“学得”一套合适的参数。
自适应控制尤其适合于机器人这种执行重复的作业任务的场合,通过不断的重复,自适应控制可以改善跟踪性能。
根据设计技术不同,机器人自适应控制分为三类,即模型参考自适应控制(MRAC )、自校正自适应控制(STAC)和线性摄动自适应控制。
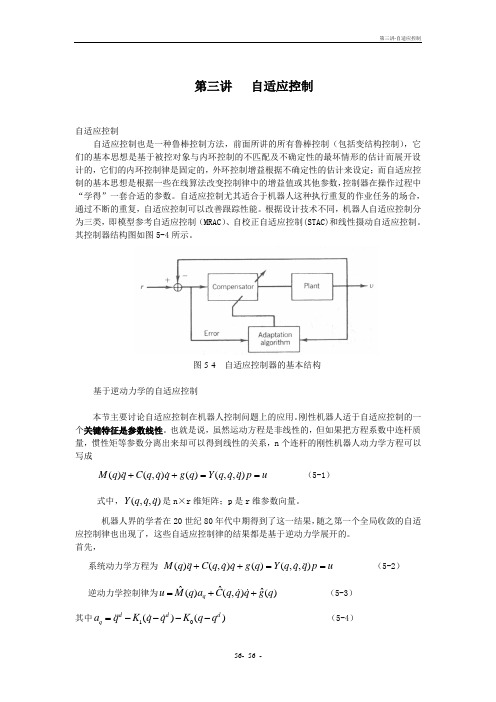
其控制器结构图如图5-4所示。
图5-4 自适应控制器的基本结构基于逆动力学的自适应控制本节主要讨论自适应控制在机器人控制问题上的应用。
刚性机器人适于自适应控制的一个关键特征是参数线性。
也就是说,虽然运动方程是非线性的,但如果把方程系数中连杆质量,惯性矩等参数分离出来却可以得到线性的关系,n 个连杆的刚性机器人动力学方程可以写成u p q q q Y q g q q q C qq M ==++),,()(),()( (5-1) 式中,),,(q qq Y 是n ×r 维矩阵;p 是r 维参数向量。
机器人界的学者在20世纪80年代中期得到了这一结果,随之第一个全局收敛的自适应控制律也出现了,这些自适应控制律的结果都是基于逆动力学展开的。
首先,系统动力学方程为 u p q q q Y q g q q q C qq M ==++),,()(),()( (5-2) 逆动力学控制律为ˆˆˆ()(,)()qu M q a C q q q g q =++ (5-3) 其中10()()dddq a q K q q K q q =---- (5-4)d q 是理想的轨迹,d q qe -=是位置跟踪误差。
ˆˆˆˆ,,,M C g p 分别为M ,C ,g ,p 的估计值。

自适应控制系统研究及其应用随着人类科技的不断进步,现代工业中的控制系统越来越智能化和自动化,人们对自适应控制系统的研究和应用越来越重视。
本文将针对自适应控制系统的研究进展、分类和应用做一个简单的介绍。
一、自适应控制系统的研究进展自适应控制系统是一种能够自动调整参数以适应不断变化的工业环境的控制系统,其优点在于能够适应不同的控制系统和环境,提高系统的稳定性和精度。
近年来,自适应控制系统的研究成果不断涌现,主要体现在以下三个方面。
1.自适应控制算法的研究自适应控制算法是自适应控制系统的核心技术之一。
目前,自适应控制算法主要有模型参照自适应控制和模型自适应控制两种。
模型参照自适应控制是将控制系统和参考模型进行比较,通过误差来调整控制器的参数;而模型自适应控制则是利用系统的模型来进行调整。
2.自适应控制器的设计优化自适应控制器的设计优化是自适应控制系统的另一重要研究方向。
自适应控制器的设计主要包括控制器结构的优化、参数选择的优化、控制器性能的评估三个方面。
目前,研究者们通过精细的控制器设计,得到了一些在实际工业环境下具有较好效果的自适应控制器。
3.多元自适应控制器的研究多元自适应控制器是一种将多种自适应控制器进行融合的方法。
在某些特殊的工业环境中,一个单一的自适应控制器无法满足要求。
因此,多元自适应控制器将多种自适应控制器进行整合,以期达到更好的控制效果。
二、自适应控制系统的分类自适应控制系统的分类可以从多个角度考虑,下面分别介绍。
1.依据控制对象的分类依据控制对象可将自适应控制系统分为线性自适应控制系统和非线性自适应控制系统。
前者是自适应控制系统中研究较多的一种,可以满足大多数工业环境的需求;后者则用于非线性系统的控制。
2.依据控制法则的分类依据控制法则可将自适应控制系统分为模型参照自适应控制系统和模型自适应控制系统。
模型参照自适应控制器直接控制控制系统,调整参数以适应不同的环境;而模型自适应控制器利用控制系统模型进行参数调整。
目录第一章自适应控制概述 (1)第一节自适应控制的产生背景及分类 (1)一.自适应控制产生的背景 (1)二.自适应控制的原理及分类 (2)第二章模型参考自适应控制(MODEL REFERENCE ADAPTIVE CONTROL)简称MRAC 3第一节MRAC的基本概念 (3)第二节最优化的设计方法 (4)一、利用梯度法的局部参数最优化的设计方法 (4)第三节基于李雅普诺夫第二方法稳定性理论的MRAC设计方法 (7)一.关于李雅普诺夫( Liaupunov) 稳定性的第二方法 (7)第四节基于超稳定理论的MRAC设计方法 (13)一、关于超稳定性理论的基本概念 (13)二、用超稳定理论设计MRAC系统 (15)第三章自校正控制 (18)第一节自校正控制的原理及组成 (18)第二节最小方差控制律 (21)第一章自适应控制概述任何一个动态系统,通常都具有程度不同的不确定性。
这种不确定性因素的产生主要由于:(1)系统的输入包含有随机扰动,如飞行器飞行过程中的阵风;(2) 系统的测量传感器具有测量噪声;以上两者又称为不确定性的(或随机的)环境因素。
(3) 系统数学模型的参数甚至结构具有不确定性。
如导弹控制系统中气动力参数随导弹飞行高度、速度、导弹质量及重心的变化而变化。
在只存在不确定环境因素,但系统模型具有确定性的情况下,这是随机控制需要解决的问题;而自适应控制是解决具有数学模型不确定性为特征的最优控制问题。
这时如果系统基本工作于确定环境下,则称为确定性自适应控制;如果系统工作于随机环境下,则称为随机自适应控制。
自适应控制的提法可归纳为:在系统数学模型不确定的条件下(工作环境可以是基本确定的或是随机的),要求设计控制规律,使给定的性能指标尽可能达到及保持最优。
为了完成以上任务,自适应控制必须首先要在工作过程中不断地在线辨识系统模型(结构及参数)或性能,作为形成及修正最优控制的依据,这就是所谓的自适应能力,它是自适应控制主要特点。
1
第一章 概述
1.1 自适应控制的研究对象
自适应控制是研究具有“不确定性”的控制系统的特性分析和综合(控制器设计)。
1. 系统不确定性产生的原因
1)内部不确定性
(1)被控对象的结构(阶次)和参数由于建模误差引起的不确定性。
(2)被控对象的结构(阶次)和参数或者动态特性是时变的或随工作作条件改变而变化。
2)外部不确定性
被控对象的运行环境(外部干扰)是随机信号而且它们的统计特性不确切知道或者是时变的。
2. 系统“不确定性”的数学描述
1)状态方程
设一个线性离散时间系统,其状态方程如下:
(1)(,)()(,)()()x k A k x k B k u k k θθε+=++ (1.1-1)
()(,)()()y k C k x k v k θ=+
式中:
()()r r ()m 1 m x k y k u k ⨯⨯⨯——状态向量 n 1
——输出向量 1 (由传感器数量决定)
——控制向量 (由执行机构决定)
{()}}{()}k u k ε——单位动态噪声称为随机序列,其统计特性未知——测量噪声
(,)A k θ,(,)B k θ,(,)C k θ 分别为系统矩阵,输入矩阵,输出矩阵,其维数为
,n n m n ⨯⨯⨯n ,v 。
k ——离散时间,k ~k T 。
其中T 为采样周期。
θ——S 维未知参数向量,可能A ,B ,C 中未知参数不同,为了简单起见,都设为S 维。
2)系统框图
根据(1.1-1)式可以画出被控对象的结构框图。
自适应控制的分类_自适应控制的主要类型
什么是自适应控制1、自适应控制所讨论的对象,一般是指对象的结构已知,仅仅是参数未知,而且采用的控制方法仍是基于数学模型的方法。
2、但实践中我们还会遇到结构和参数都未知的对象,比如一些运行机理特别复杂,目前尚未被人们充分理解的对象,不可能建立有效的数学模型,因而无法沿用基于数学模型的方法解决其控制问题,这时需要借助人工智能学科,也就是智能控制。
3、自适应控制与常规的控制与最优控制一样,是一种基于数学模型的控制方法。
4、自适应控制所依据的关于模型的和扰动的先验知识比较少,需要在系统的运行过程中不断提取有关模型的信息,使模型愈来愈准确。
5、常规的反馈控制具有一定的鲁棒性,但是由于控制器参数是固定的,当不确定性很大时,系统的性能会大幅下降,甚至失稳。
自适应控制的原理框图
自适应控制的分类自从50年代末由美国麻省理工学院提出第一个自适应控制系统以来,先后出现过许多不同形式的自适应控制系统。
比较成熟的自适应控制系统有下述几大类。
(1)可变增益自适应控制系统
这类自适应控制系统结构简单,响应迅速,在许多方面都有应用。
其结构如图1所示,调节器按被控过程的参数的变化规律进行设计,也就是当被控对象(或控制过程)的参数因工作状态或环境情况的变化而变化时,通过能够测量到的某些变量,经过计算而按规定的程序来改变调节器的增益,以使系统保持较好的运行性能。
另外在某些具有非线性校正装置和变结构系统中,由于调节器本身对系统参数变化不灵敏。
采用此种自适应控制方案往往能去的较满意的效果。
(2)模型参考自适应控制系统(Model Reference Adaptive System,简称MRAS)
模型参考自适应控制系统由以下几部分组成,即参考模型、被控对象、反馈控制器和调整控制器参数的自适应机构等部分组成,如图2所示。