机器人模型
- 格式:doc
- 大小:13.00 KB
- 文档页数:1

建立机器人模型1Link类:Link([theta, d, a, alpha])A :关节传动矩阵friction : 摩擦力操作方法Link 的类函数:建立机器人模型函数一nofriction: 摩擦为0islimit:检测关节变量是否超出范围isrevolute: 检测关节是否为转动关节isprismatic: 检测关节是否为移动关节检测方法1Link类:Link([theta, d, a, alpha])display : 显示D-H矩阵Link 的类函数:建立机器人模型函数一dyn: 显示动力学参数type:关节类型:‘R’或‘P’char : 转化为字符串显示方法转换方法1Link 的类属性(读/写):theta:D-H参数d:D-H参数建立机器人模型函数Link类:Link([theta, d, a, alpha])一a:D-H参数alpha:D-H参数sigma: 默认0,旋转关节;1,移动关节mdh: 默认0,标准D-H;1,改进D-Hoffset:关节变量偏移量qlim:关节变量范围运动学参数1Link 的类属性(读/写):m: 质量r: 质心建立机器人模型函数Link类:Link([theta, d, a, alpha])一I: 惯性张量B: 粘性摩擦Tc: 静摩擦G: 减速比Jm: 转子惯量动力学参数2Seriallink类:1R=SerialLink(links, options);2R.plot(theta);Seriallink建立机器人模型函数一links :连杆向量gravity :重力加速度base :基座标系tool:与基座标系的变换矩阵qlim:关节极限位置offset :关节偏移量name :机器人的名字manuf:制造者的名字comment:注释的类属性(读/写):2Seriallink类:1R=SerialLink(links, options);2R.plot(theta);Seriallink建立机器人模型函数一n :关节数config:关节配置,如‘RRRRRR’theta :D-H参数mdh:D-H矩阵类型:默认0,标准D-H;1,改进D-Hd :D-H参数a :D-H参数alpha:D-H参数的类属性(读):DH参数二标准DH改进DH1.连杆选用的固连坐标系不同以连杆的后一个关节坐标系为其固连坐标系以连杆的前一个关节坐标系为其固连坐标系2.连杆坐标系的X轴方向确定方式不同以当前Z轴和“前一个”坐标系的Z轴叉乘确定以“后一个”坐标的Z轴与当前Z轴叉乘确定X轴X轴3.连杆坐标系之间的变换规则不一样DH参数二标准DH参数:αi为绕着X i轴,从Z i-1旋转到Zi的角度a i为沿着X i轴,从Z i-1移动到Z i的距离θi为绕着Z i-1轴,从X i-1旋转到X i的角度1d i为沿着Z i-1轴,从X i-1移动到X i的距离DH参数二改进DH参数:αi-1为绕着X i-1轴,从Z i-1旋转到Z i的角度a i-1为沿着X i-1轴,从Z i-1移动到Z i的距离θi为绕着Z i轴,从X i-1旋转到X i的角度2d i为沿着Z i轴,从X i-1移动到X i的距离找出各关节轴,并标出(或画出)这些轴线的延长线。


制作机器人模型的步骤一、准备工作制作机器人模型前,首先需要准备一些必要的工具和材料。
常用的工具包括剪刀、胶水、削刀、钳子等,而常用的材料包括纸板、塑料、金属等。
根据机器人模型的设计和要求,选择适合的工具和材料。
二、设计机器人模型在制作机器人模型之前,需要先进行设计。
可以根据自己的喜好和想象力,设计出独特的机器人形象。
可以参考一些现有的机器人形象,或者根据自己的创意进行设计。
设计时要考虑机器人的外形、功能、结构等要素,确保设计的机器人模型具有实用性和美观性。
三、制作机器人的外壳制作机器人模型的第一步是制作机器人的外壳。
根据设计好的图纸或者模板,将选定的材料剪裁成合适的形状,并使用胶水将各个部分粘合在一起。
可以使用削刀等工具进行修整,使外壳的边缘光滑。
外壳的制作完成后,可以使用颜料或者贴纸进行装饰,增加机器人的美观度。
四、安装机器人的动力系统机器人模型的动力系统可以采用电池、电机等设备来驱动。
根据机器人模型的设计,选择适合的动力系统,并将其安装在机器人的内部。
电池可以安装在机器人的腹部或者背部,电机可以安装在机器人的关节处,以实现机器人的运动。
五、安装机器人的传感器机器人模型的传感器可以用来感知周围的环境。
常见的传感器包括红外线传感器、声音传感器、触摸传感器等。
根据机器人模型的功能和设计,选择适合的传感器,并将其安装在机器人的合适位置。
传感器的安装需要连接到主控板或者处理器,以实现机器人的感知功能。
六、连接机器人的电路机器人模型的各个部件需要通过电路进行连接。
根据机器人模型的设计和功能,选择适合的电线和连接器,并将其连接到各个部件上。
电路的连接需要仔细检查,确保连接正确,避免出现短路或者断路等问题。
七、编程机器人的行为机器人模型的行为需要通过编程来实现。
根据机器人模型的功能和设计,选择合适的编程语言和开发环境,并编写相应的代码。
代码可以实现机器人的运动、感知、决策等功能,使机器人模型具有智能化的行为。

机器人学导论第三章:机器人建模与表示3.1 机器人模型机器人模型是机器人学中最重要的概念之一。
它描述了机器人的物理特征和行为。
机器人模型可以是物理模型,也可以是数学模型。
3.1.1 物理模型物理模型是指将实际的机器人物理特征通过物体的尺寸、质量、结构等进行描述的模型。
物理模型可以用来研究机器人的运动、力学特性以及与环境的交互。
在物理模型中,常用的描述方法有刚体模型和柔软体模型。
刚体模型认为机器人的构件是刚性的,不会发生变形,而柔软体模型则考虑了机器人构件的弹性特性。
3.1.2 数学模型数学模型是指通过数学方程或函数来描述机器人的特征和行为的模型。
数学模型可以用来研究机器人的控制算法、运动规划、感知等问题。
常用的数学模型有几何模型、运动学模型、动力学模型等。
几何模型描述机器人的几何特征,如位置、姿态等;运动学模型描述机器人的运动学特性,如速度、加速度等;动力学模型描述机器人的力学特性,如力、力矩等。
3.2 机器人表示机器人表示是指将机器人的信息进行编码和存储的方法。
机器人表示可以是离散的或连续的,可以是静态的或动态的。
机器人的状态表示是对机器人在某一时刻的特征和行为进行编码的方法。
常用的状态表示方法有位姿表示、关节状态表示、力传感器状态表示等。
位姿表示是指用位置和方向来描述机器人的姿态。
常用的位姿表示方法有笛卡尔坐标表示和欧拉角表示。
关节状态表示是指用关节角度或关节位置来描述机器人的关节状态。
力传感器状态表示是指用力和力矩来描述机器人的外部力和力矩。
机器人的环境表示是对机器人周围环境的信息进行编码的方法。
常用的环境表示方法有场景图表示、网格地图表示、障碍物表示等。
场景图表示是指用图的形式表示机器人周围的物体及其关系。
网格地图表示是指将机器人周围的环境划分为一个个网格,每个网格表示一种状态。
障碍物表示是指用几何体或网格来表示机器人周围的障碍物。
3.3 机器人建模与表示的应用机器人建模与表示在机器人学中具有广泛的应用。
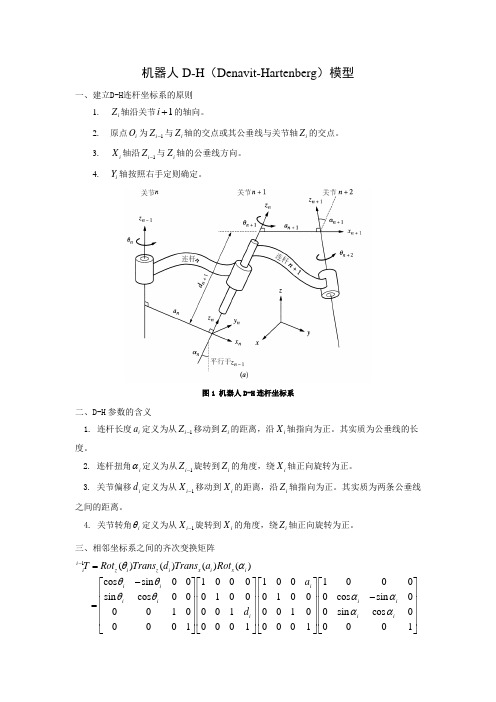
机器人D-H (Denavit-Hartenberg )模型一、建立D-H 连杆坐标系的原则1.i Z 轴沿关节1i +的轴向。
2. 原点i O 为1i Z -与i Z 轴的交点或其公垂线与关节轴i Z 的交点。
3. i X 轴沿1i Z -与i Z 轴的公垂线方向。
4.i Y 轴按照右手定则确定。
图1 机器人D-H 连杆坐标系二、D-H 参数的含义1. 连杆长度i a 定义为从1i Z -移动到i Z 的距离,沿i X 轴指向为正。
其实质为公垂线的长度。
2. 连杆扭角i α定义为从1i Z -旋转到i Z 的角度,绕i X 轴正向旋转为正。
3. 关节偏移i d 定义为从1i X -移动到i X 的距离,沿i Z 轴指向为正。
其实质为两条公垂线之间的距离。
4. 关节转角i θ定义为从1i X -旋转到i X 的角度,绕i Z 轴正向旋转为正。
三、相邻坐标系之间的齐次变换矩阵1()()()()cos sin 001000100100sin cos 00010001000cos sin 0001000100100sin cos 0001001001001i iz i z i x i x i i i i ii i i i iiT Rot Trans d Trans a Rot a d θαθθθθαααα-=-⎡⎤⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥-⎢⎥⎢⎥⎢⎥⎢⎥ =⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦⎣⎦cos sin cos sin sin cos sin cos cos cos sin sin 0sin cos 01i i i i i i i ii ii ii i iiia a d θθαθαθθθαθαθαα-⎛⎫⎪- ⎪= ⎪ ⎪⎝⎭(注:文档可能无法思考全面,请浏览后下载,供参考。
可复制、编制,期待你的好评与关注)。

大型机器人模型知识大型机器人模型是指具有较大体型和复杂功能的机器人模型,通常用于展示、娱乐或研究等领域。
这些机器人模型通常具有高度仿真的外观和动作,能够模拟人类的动作和行为,具有较高的技术含量和观赏性。
大型机器人模型的制作和设计需要综合运用机械、电子、材料等多个学科的知识。
首先,设计师需要对机器人的外形、结构和功能进行详细的规划和设计。
其次,制作过程中需要使用各种先进的材料和工艺,如碳纤维、3D打印技术等,以确保机器人模型的稳定性和耐用性。
同时,电子技术也是大型机器人模型不可或缺的一部分,通过传感器、电机、控制系统等设备,实现机器人模型的动作和交互功能。
在大型机器人模型的应用领域中,展示和娱乐是最为常见的用途。
例如,各种主题公园、科技馆和展览会中常常可以看到各种形态各异的大型机器人模型,它们可以模拟人类的动作、表情和声音,给观众带来身临其境的视听体验。
此外,大型机器人模型还可以用于影视制作和舞台表演,通过其惊人的外观和动作,为影视作品和舞台剧增添视觉冲击力和娱乐性。
除此之外,大型机器人模型还在科研领域有着重要的应用。
科研人员可以通过制作大型机器人模型来研究人类的动作和行为,探索人机交互、智能控制等领域的技术难题。
同时,大型机器人模型也可以用于模拟极端环境下的工作场景,如太空探索、深海勘探等,为科学研究提供重要的实验平台。
总的来说,大型机器人模型是一种集科技、艺术和娱乐于一体的高科技产品,它不仅展现了人类对科技的探索和创新,同时也为人们带来了全新的视听体验和科学启发。
随着科技的不断进步,相信大型机器人模型将会在更多的领域展现其独特的魅力和价值。
大型机器人模型知识
大型机器人模型是一种具有高度仿真度和复杂功能的机器人模型,通常由金属、塑料和其他材料制成。
这些模型通常是按照真实
机器人或科幻作品中的机器人设计制作的,具有逼真的外观和动作。
大型机器人模型不仅是玩具或收藏品,更是一种展示科技、机械和
工程技术的杰作。
大型机器人模型的制作需要深厚的机械和电子知识,以及对材
料和工艺的精湛掌握。
制作过程通常包括设计、模型制作、电路连
接和程序编码等多个环节。
制作者需要对机械结构、电子元件和程
序控制有深入的了解,才能完成一个高质量的大型机器人模型。
大型机器人模型的功能也非常丰富,可以包括远程遥控、自主
行走、声光效果、甚至人机交互等多种特性。
这些功能需要制作者
对传感器、执行器、控制系统等方面有着丰富的经验和技能,才能
实现。
除了技术方面的挑战,大型机器人模型的制作也需要制作者对
机器人本身的特性有深入的了解。
他们需要研究真实机器人的运动
原理、结构设计和工作原理,以便将这些知识应用到模型的制作中。
总的来说,大型机器人模型知识涉及到机械、电子、编程、材料和机器人学等多个领域的知识,需要制作者具备综合的技术素养和丰富的经验。
制作一个高质量的大型机器人模型不仅需要创造力和想象力,更需要对科技和机械的深刻理解。
希望未来能有更多的人投身到大型机器人模型的制作中,为科技和机械领域的发展做出更大的贡献。
机器人僵硬性动力模型研究机器人一直是科幻作品中不可或缺的元素。
而如今,随着科技的进步,机器人已经不再是一种奢侈的产品,而是被广泛应用于生产、军事、医疗等领域。
如何让机器人更加灵活地进行各种动作,是当前机器人技术面临的一个难题。
其中,机器人的动力模型就是至关重要的一环。
本文将阐述机器人僵硬性动力模型的研究,探讨其优缺点及应用场景。
一、机器人僵硬性动力模型的原理机器人僵硬性动力模型是对机器人动力学行为的描述。
其基本原理是把机器人身体抽象成为多个块(或叫弹簧),用弹性力来描述它们之间的关系。
这些块之间通常是相对刚性的。
当机器人发生运动时,弹性力会导致系统的变形,从而改变机器人的运动轨迹和速度。
在机器人木偶动力学模型中,每个块都有一定的质量,并且连接了由相对位置和方向信息描述的弹性关节。
这个模型只涉及机器人的上下左右和前后移动,并忽略了机器人周围环境的影响。
因此,一些高度动态的机器人动作可能需要更高维度的动力学模型来描述。
二、机器人僵硬性动力模型的优点机器人僵硬性动力模型的最大优点是其简单性。
它基于对机器人的运动信息的抽象,并将其表示为刚性块之间的弹性关系,从而大大简化了动力学分析的过程。
而且,由于它只处理机器人在空间中的运动,无需考虑其他因素的影响,所以计算量也相对较小。
此外,机器人僵硬性动力模型还具有很好的可解释性。
因为机器人的运动只涉及一些基本的运动学要素,所以相对容易理解和解释。
三、机器人僵硬性动力模型的缺点与优点相对应的是,机器人僵硬性动力模型也存在一些不足之处。
首先,这个模型通常无法准确预测机器人运动的细节行为,例如机器人的摆臂。
这是因为它无法考虑机器人周围环境和其他动态因素的影响。
其次,机器人僵硬性动力模型还存在着许多实际问题需要解决。
例如,机器人模型必须满足数学公理的一些条件,而这些条件可能与机器人的实际行为不相符。
此外,一些高端运动也需要更加复杂的模型来进行描述。
四、机器人僵硬性动力模型的应用场景机器人僵硬性动力模型能够最好地应用于需要对机器人运动进行已知输出的场景。
幼儿园模型机器人制作方案一、方案概述本方案旨在为幼儿园制作一款可供幼儿操作的模型机器人,该机器人具有简单易懂的操作方式,能够提高幼儿的观察能力和动手能力,让他们在玩乐中学习。
二、设计理念1. 造型设计:机器人造型要具有可爱、温馨的特点,它应该是幼儿们心目中理想的伙伴。
2. 操作方式:机器人需要配备简单易懂的操作方式,如按钮、开关、遥控器等。
3. 材料选择:机器人主体材料应选用环保材料,安全无毒无害。
4. 功能设置:机器人需要拥有丰富多彩的功能设置,如说话、唱歌、跳舞等。
三、材料准备1. 木板或塑料板材2. 齿轮3. 电动马达4. 遥控模块5. 语音模块6. LED灯珠7. 按钮开关四、制作步骤1. 制作机器人主体。
使用木板或塑料板材制作出机器人的外壳,并根据设计理念进行粉刷或喷漆等装饰。
2. 安装电动马达与齿轮。
将电动马达固定在机器人主体内,然后通过齿轮传递力量,驱动机器人的运动。
3. 安装遥控模块。
将遥控模块固定在机器人主体内,实现远程操控机器人的功能。
4. 安装语音模块。
将语音模块安装在机器人主体内,并设置好语音功能,如播报儿歌、故事等。
5. 安装LED灯珠。
将LED灯珠安装在机器人主体上,实现闪烁、变色等效果。
6. 安装按钮开关。
安装方便的按钮开关,以便幼儿可以方便地操作。
五、功能设置1. 说话:语音模块可以播放儿童歌曲、故事等内容,让幼儿听到更多的声音和信息。
2. 唱歌:机器人可以唱儿童歌曲或童谣等内容,提高幼儿对音乐的感知能力。
3. 跳舞:通过电动马达和齿轮传动实现跳舞功能,让幼儿感受到音乐和舞蹈的魅力。
4. 闪烁:通过LED灯珠实现闪烁、呼吸等效果,让机器人更加生动有趣。
5. 远程操控:通过遥控模块实现远程操控机器人,提高幼儿的观察和操作能力。
六、安全注意事项1. 制作过程中要注意材料的环保性和安全性。
2. 安装电动马达时要注意电源的安全,避免触电事故。
3. 遥控模块应设置适当的距离,以避免对幼儿产生不良影响。
有什么比较好的机器人模型?
除了横山宏,高达,变形金刚,超时空要塞之外,边境保卫者borderbreaker,同寿屋出品也不错。
TOMMY的变形金刚系列,骨架已完成,装甲需要自己处理。
如果不在意比例,可以买纸箱战机来玩。
不需要很高的技术和很多工具,价格亲民,制作简单,但是又有很多玩法,不会像高达BB战士那样把玩性弱。
如果要按照题材来分的话大概还有机动警察,超级机器人大战,之前提到的装甲骑兵,机甲创世纪,再就是极度鬼畜的FFS五星物语系列,这个系列的特点就是造型极度华丽,制作难度也能用华丽来形容,目前大部分都是以树脂件的形式进行商品贩售,少数塑料套件也是属于高难度级的商品。
另外,如果仅仅是泛指立体造型商品,机器人模型有可动和不可动之分,有拼装和完成品之分,有塑料树脂之分,分色和无分色,部分完成品,Q版等各种分类,这样的话简直没完没了,希望能在描述里详细些告知。
如果大家喜欢机器人模型,以上可以作参考,或者上一个叫萝卜库的网站,里面很多关于机器人的百科知识,还有每天更新的机器人资讯和视频,很实用很迅速,经常上去逛逛能学到很多。
而且萝卜库这个网站会经常举办一些线下活动,机器人制作和表演等等,遇上活动报名参加体验,也可以认识志同道合的人。
想要了解更多关于机器人的资讯,参与讨论机器人发展,与机器人创客交流。
一切都在萝卜库里面!。