PWM至线性信号转换电路
- 格式:pdf
- 大小:28.11 KB
- 文档页数:2

pwm整流电路原理
PWM整流电路是一种常见的电子电路,用于将脉宽调制(PWM)信号转换为直流信号。
它可以有效地将高频脉冲信
号转换为平滑的直流电压输出。
整流电路的核心部分是二极管桥。
二极管桥由四个二极管组成,通常是正向导通的。
当PWM输入信号的脉冲高电平时,二极
管桥的两个对角线上的二极管导通,从而将信号的正半周期传导到输出端。
当PWM输入信号的脉冲低电平时,二极管桥的
另外两个对角线上的二极管导通,从而将信号的负半周期传导到输出端。
在整流电路中,输出端通常连接一个滤波电路,以减小输出端的纹波电压。
滤波电路由电容和电感组成,可以将输出端的脉冲信号滤除,从而获得较为平滑的直流电压输出。
整流电路还可以通过PWM信号的调制比例来控制输出端的电
压大小。
调整PWM信号的高电平时间与低电平时间的比例可
以改变整流电路的输出电压。
通过调节PWM信号的占空比,
整流电路可以实现电压的控制功能。
综上所述,PWM整流电路通过二极管桥和滤波电路将脉宽调
制信号转换为直流信号。
它广泛应用于电子设备中,如电源供应器、直流电动机控制等领域。
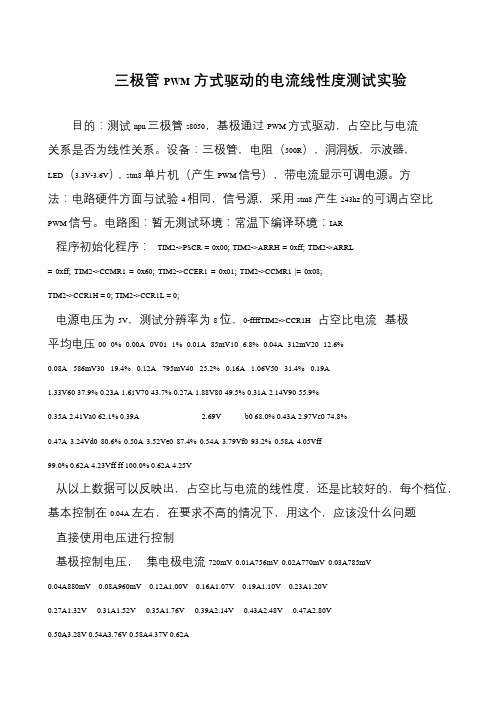
三极管PWM方式驱动的电流线性度测试实验目的:测试npn 三极管s8050,基极通过PWM 方式驱动,占空比与电流关系是否为线性关系。
设备:三极管,电阻(500R),洞洞板,示波器,LED(3.3V-3.6V),stm8 单片机(产生PWM 信号),带电流显示可调电源。
方法:电路硬件方面与试验4 相同,信号源,采用stm8 产生243hz 的可调占空比PWM 信号。
电路图:暂无测试环境:常温下编译环境:IAR程序初始化程序:TIM2->PSCR = 0x00; TIM2->ARRH = 0xff; TIM2->ARRL= 0xff; TIM2->CCMR1 = 0x60; TIM2->CCER1 = 0x01; TIM2->CCMR1 |= 0x08; TIM2->CCR1H = 0; TIM2->CCR1L = 0;电源电压为5V,测试分辨率为8 位,0-ffffTIM2->CCR1H 占空比电流基极平均电压00 0% 0.00A 0V01 1% 0.01A 85mV10 6.8% 0.04A 312mV20 12.6%0.08A 586mV30 19.4% 0.12A 795mV40 25.2% 0.16A 1.06V50 31.4% 0.19A1.33V60 37.9% 0.23A 1.61V70 43.7% 0.27A 1.88V80 49.5% 0.31A2.14V90 55.9% 0.35A 2.41Va0 62.1% 0.39A 2.69V b0 68.0% 0.43A 2.97Vc0 74.8% 0.47A3.24Vd0 80.6% 0.50A 3.52Ve0 87.4% 0.54A 3.79Vf0 93.2% 0.58A4.05Vff 99.0% 0.62A 4.23Vff ff 100.0% 0.62A 4.25V从以上数据可以反映出,占空比与电流的线性度,还是比较好的,每个档位,基本控制在0.04A 左右,在要求不高的情况下,用这个,应该没什么问题直接使用电压进行控制基极控制电压,集电极电流720mV 0.01A756mV 0.02A770mV 0.03A785mV 0.04A880mV 0.08A960mV 0.12A1.00V 0.16A1.07V 0.19A1.10V 0.23A1.20V 0.27A1.32V 0.31A1.52V 0.35A1.76V 0.39A2.14V 0.43A2.48V 0.47A2.80V 0.50A3.28V 0.54A3.76V 0.58A4.37V 0.62A。


一、具体方案单路输出方案双路输出方案MCU通过PWM调制输出占空比信号。
一般MCU都有集成专门的占空比信号输出端口。
通过该端口只要刷新相应寄存器的数据就能改变输出PWM的占空比。
如果调制端口不足也可以通过软件使用定时器控制实现在普通的I/O口输出占空比信号。
这时会占用一定的程序运算资源。
信号转换电路包括一电压基准电路、方波整形电路和输出滤波电路组成。
电压基准电路采用TL431基准芯片通过比例调节产生。
电压基准电路的功能为产生高精度的电压源为方波整形电路供电。
方波整形电路采用CD40106反相器实现。
整形电路的功能为将MCU输出的方波信号整形为占空比不变,但是高低电平为高精度电压的方波信号。
由于给CD40106供电的电压源为高精度电源,同时CD40106内部采用MOS管共漏极接法,在负载电流很小的情况下可以实现方波高低电压完全等于电源正负电压。
输出滤波电路采用阻容滤波,其功能为滤除整形电路输出信号的交流分量,留下其中的直流分量。
如果信号的占空比为D,电源电压为U,那么信号中的直流分量为U1=DU,因此输出信号的电压为Uo=DU。
所以在保证电源电压U不变的情况下只要控制D 就可以控制输出信号的电压。
为了保证高精度的直流分量,整形电路输出信号波形完全不能失真。
因此整流滤波电路和整形输出电路之间的电阻R1必须足够大,以至于在对电容充放电的过程中流过电阻R1上的电流完全不会导致整形电路输出信号波形失真。
二、参数设计1、确定PWM信号电压参数设计时首先应确定PWM输出的信号电压,进而确定CD40106的供电电压。
如果MCU采用5V供电,那么CD40106也采用5V电源供电,设计信号转换电路的输出电压在0~5V之间变化,使用区间控制在0.5~4.5V之间。
2、设计基准电压源参数根据TL431的基准电压和基准电压源电压计算R5和R6比例值。
R5和R6的阻值设计应当保证流过电阻的电流大于0.1mA。
R3根据电源电压和基准电源电压的差值计算,应当保证流过R3的电流大于2mA。
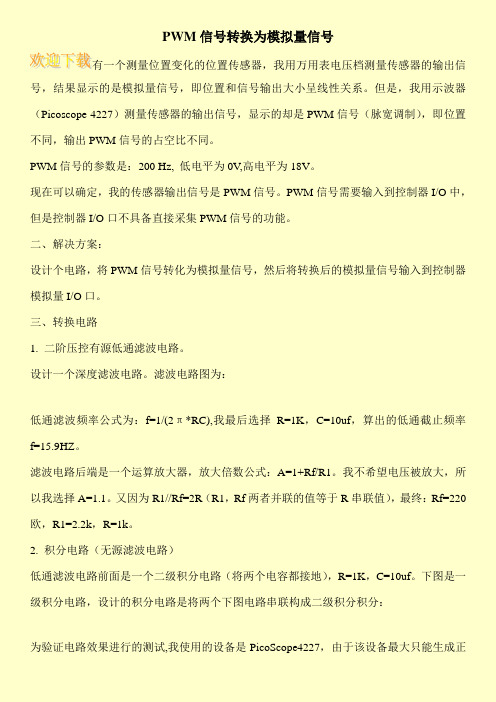
PWM信号转换为模拟量信号
有一个测量位置变化的位置传感器,我用万用表电压档测量传感器的输出信号,结果显示的是模拟量信号,即位置和信号输出大小呈线性关系。
但是,我用示波器(Picoscope 4227)测量传感器的输出信号,显示的却是PWM信号(脉宽调制),即位置不同,输出PWM信号的占空比不同。
PWM信号的参数是:200 Hz, 低电平为0V,高电平为18V。
现在可以确定,我的传感器输出信号是PWM信号。
PWM信号需要输入到控制器I/O中,但是控制器I/O口不具备直接采集PWM信号的功能。
二、解决方案:
设计个电路,将PWM信号转化为模拟量信号,然后将转换后的模拟量信号输入到控制器模拟量I/O口。
三、转换电路
1. 二阶压控有源低通滤波电路。
设计一个深度滤波电路。
滤波电路图为:
低通滤波频率公式为:f=1/(2π*RC),我最后选择R=1K,C=10uf,算出的低通截止频率f=15.9HZ。
滤波电路后端是一个运算放大器,放大倍数公式:A=1+Rf/R1。
我不希望电压被放大,所以我选择A=1.1。
又因为R1//Rf=2R(R1,Rf两者并联的值等于R串联值),最终:Rf=220欧,R1=2.2k,R=1k。
2. 积分电路(无源滤波电路)
低通滤波电路前面是一个二级积分电路(将两个电容都接地),R=1K,C=10uf。
下图是一级积分电路,设计的积分电路是将两个下图电路串联构成二级积分积分:
为验证电路效果进行的测试,我使用的设备是PicoScope4227,由于该设备最大只能生成正。
2PWM到DAC电压输出的电路实现根据图2的结构,图3是最简单的实现方式。
图3中,PWM波直接从MCU的PWM 引脚输出,该电路没有基准电压,只通过简单的阻容滤波得到DAC的输出电压。
R1和C 1的具体参数可根据式(2)的第2部分的一次谐波频率来选择,实际应用中一般选择图2中阻容滤波器的截止频率为式(2)的基波频率的1/4左右。
图3的PWM波的VH和VL受到MCU输出高低电平的限制,一般情况下VL不等于0 V,VH也不等于VCC。
例如,对于单片机AT89C52[2,3],当VCC为+5 V时,VH和VL分别为4.5 V和0.45 V左右,而且该数值随着负载电流和温度而变化。
根据式(2)的直流分量可知,DAC电压输出只能在0.45~ 4.5 V之间变化,而且随负载电流和环境温度变化,精度很难保证。
由于该电路的变化部分精度不高,没有必要采用高分辨率的PW M输出,8位即可。
另外图2的DAC输出的负载能力也比较差,只适合与具有高输入阻抗的后续电路连接。
因此,图3的电路只能用在对DAC输出精度要求不高、负载很小的场合。
对精度和负载能力要求较高的场合,需要对图3的电路进行改进,增加基准电压、负载驱动等电路。
图4的电路在图3电路的基础上增加了开关管T1、基准电压源LM3365和输出放大器TL V2472。
MCU从A点输出的PWM波驱动T1的栅极,T1按照PWM的周期和占空比进行开关。
T1为低导通电阻和开关特性好的开关管,如IRF530[4],其典型导通电阻小于0.16 Ω,而截止电阻却非常大,与T1并联的为基准电压LM3365。
图4的B点将得到理想的PWM波形,即:VH=5 V,VL=0 V,波形为方波。
A点的PWM波,经过整形得到B点理想PWM波,B点的PWM波再经过两级阻容滤波在C点得到直流分量,即M CU输出的调制PWM波在C点得到解调,实现了DAC功能。
根据式(2)可知,C点的电压为(5 ×n/N)V,为0~5 V之间的电压。
pwm三极管缓冲电路PWM三极管缓冲电路PWM(Pulse Width Modulation)三极管缓冲电路是一种常见的电子电路,用于将PWM信号转换为放大后的输出信号。
它常用于控制电机、灯光等设备,使其能够根据输入的PWM信号进行精确的调节和控制。
PWM信号是一种脉冲宽度可调的信号,它的特点是脉冲的宽度和周期可以根据需要进行调节。
在PWM三极管缓冲电路中,三极管起到放大输入信号的作用,将其转换为可以驱动负载的信号。
PWM三极管缓冲电路的基本原理是利用三极管的放大特性,将PWM信号放大到足够的电压和电流,以驱动负载。
它由输入端、输出端、三极管和电阻等元件组成。
在PWM三极管缓冲电路中,输入端接收PWM信号,经过电阻分压后进入三极管的基极。
三极管的发射极接地,集电极通过电阻和负载相连。
当输入信号为高电平时,三极管导通,电流通过三极管的集电极和电阻,流向负载。
当输入信号为低电平时,三极管截止,电流无法通过三极管,负载处于断开状态。
PWM三极管缓冲电路的输出信号与输入信号呈放大关系。
通过合理选择三极管的参数和电阻的数值,可以实现不同程度的放大。
因此,PWM三极管缓冲电路可以根据需要调节输出信号的幅值。
PWM三极管缓冲电路的优点是结构简单、成本低廉。
它可以实现对PWM信号的放大和驱动,使其能够控制各种负载。
此外,PWM三极管缓冲电路还具有较高的响应速度和较小的功耗,适用于各种应用场合。
然而,PWM三极管缓冲电路也存在一些局限性。
首先,由于三极管的特性限制,其输出信号存在一定的失真和非线性。
其次,由于电阻和三极管的参数会受到温度和工作环境的影响,因此需要对电路进行合理的设计和调整,以保证输出信号的稳定性和准确性。
在实际应用中,PWM三极管缓冲电路常用于控制电机的转速和方向,调节灯光的亮度和颜色等。
它可以根据需要调整输出信号的幅值和占空比,实现精确的控制和调节。
PWM三极管缓冲电路是一种常见且实用的电子电路。
PWM,SBUS,PPM信号转模拟电压的⽅案PWM,SBUS,PPM信号转模拟电压的⽅案-----------------本⽂由撰写,并提供相应产品服务。
----------------案例场景有个内部采⽤电瓶车的驱动器的⽆线⼩车,现在需要使⽤遥控器控制⼩车的前进后退。
也就是说:把之前电瓶车的⼿动油门把⼿换成⽆线控制的。
遥控器选择⽬前市⾯上有好多的品牌:“天地飞,futaba,斯翼等。
遥控器分为接收器和发射器:发射器就是控制⼈⼿⾥拿的摇杆那⼀部分;接收器则是信号接收端。
⽤来给⼩车的电机驱动器发送信号的。
但是现在有个问题,接收机的输出信号并不能直接给电机驱动器使⽤。
因为常见遥控接收机的输出信号⼀般有三种:舵机PWM信号、SBUS、PPM。
⽽电瓶车的电机驱动器的输⼊信号要求⼀般是个模拟电压(常见的电瓶车把⼿其实就是⼀个旋转电位器,旋转到不同的位置会输出不同的电压值,以此来控制电机驱动器,从⽽达到调节电机转速的问题。
)因此,要想使⽤遥控器,必须解决接收机输出信号转成模拟电压的问题。
为此,我们设计了⼀款。
下图为增加转换板之后的系统框架图解决⽅案1. 舵机PWM转电压舵机PWM,基本上每个接收机都会输出的⼀种⽐较常见PWM信号:⼀般信号频率50HZ,信号⾼电平变化时间在1ms-2ms之间变化(不同的遥控器会有⼩幅度的差异)。
舵机PWM基础知识请点击:转换模块的核⼼思路就是采集接收机输出的PWM型号,接着分析⾼电平时间,然后根据⾼电平时间输出相应的线性变化模拟电压值。
⼀般舵机PWM输出的⾼电平时间为1ms-2ms之间变化,但是实际上我们为了匹配不同的遥控器和留有⼀定余量,我们设定电平电话的⾼电平区间为1.1ms-1.9ms之间。
也就是说当采集到1.1ms的⾼电平PWM信号时,模拟电压输出最⼩值(0V);当采集到1.9ms的⾼电平时间PWM信号时,模拟电压输出最⼤值(5V)。
本⽂设计的模块中,⼀共留出了4路PWM转电压的通道。
PWM 至线性信号转换电路本文介绍了一种将PWM 信号转换成放大、缓冲后的线性信号的电路,适用于风扇速度控制,允许在3.3V 输入时提供12V 风扇的线性控制。
Maxim 提供各种PWM 输出的风扇速度控制器,使风扇速度随着温度的变化而改变。
通过周期性地控制风扇电源的通、断实现这一控制方案,风扇速度由PWM 信号的占空比设置。
这种方案的典型应用电路对大多数情况是可以接受的。
然而,有些情况下,由于风扇调制能够产生嘈杂的噪音,需要用固定电源为风扇供电。
如果给风扇周期性供电产生较大的噪音,可以考虑采用图1 所示电路。
这种情况下,一对儿互补BJT 管(Q1)和PMOS FET (Q2) 构成线性放大器图1. 将低压PWM 信号转换成放大、缓冲后的线性输出的简单电路。
该电路工作原理如下:Q1 中PNP 管的基极是放大器的同相输入。
NPN 管的发射极是反相输入。
PNP 管配置为射随器,NPN 管既可作为射随器,也可以作为初级放大单元。
由于PNP 管和NPN 管工作在大致相同的电流密度和温度条件下,两个输入电压近似地相互保持一致,流出反相输入端的电流镜像到NPN 管的集电极,在电阻R2 上产生压降。
R2 的压降驱动Q2 的VGS,在Q2 的漏极被放大,成为放大器的输出。
随着放大器输出的升高,当电压达到足以使流出反相输入端的电流为零时,即达到了放大器的稳定工作点。
这里采用的放大器大约有100mV 的输出失调,这是由于强制R2 的压降达到Q2 VGS 的临界值造成的。
这对指定的风扇速度控制应用是不合理的。
将放大器增益设置为+4,适合3.3V PWM 信号,当PWM 信号达到100%占空比时,信号电平达到最大输出摆幅12V。
对于Q1,可以选择CMXT3946,它是双晶体管互补结构,当然,也可以用。
TEMPERATURE SENSORS and THERMAL MANAGEMENT Mar 29, 2004 Circuit Converts PWM to Amplified and Buffered
Linear Signal
A simple circuit converts a low-voltage PWM signal to an amplified and
buffered linear output. Intended for fan speed control, it allows a 3.3V input
to provide linear control of a 12V fan.
Maxim makes a variety of fan speed controllers with PWM outputs to control fan speed as a function of temperature. These work by cycling the power to the fan off and on. The fan's speed with the duty cycle setting the fan's speed. In many situations the typical application circuit for these is adequate. However, some situation require a constant power supply to the fan due to audible noise from the fan modulation.
If the noise from cycling the fan's power is too much, consider the circuit of Figure 1. In this case, complementary pair of BJTs (Q1) and a PMOS FET (Q2) create a linear amplifier.
Figure 1. A simple circuit converts a low-voltage PWM signal to an amplified and buffered linear output.
The circuit works in the following manner. The base of the PNP in Q1 is the non-inverting input to the amplifier, and the emitter of the NPN is the inverting input. The PNP is biased as an emitter follower, and the NPN is used both as an emitter follower and as the initial gain element.
As the PNP and the NPN operate at roughly the same current density and temperature, the two input voltages approximately track each other. Any current which flows out of the inverting input is mirrored to the NPN collector, causing a drop across resistor R2. The drop across R2 drives the V GS of Q2, which is amplified at Q2's drain, the amplifier output. The output rises to voltage sufficient to null the inverting input to approximately zero current, at which point the amplifier has reached a stable operating point.
The amplifier as specified has about 100mV of output offset primarily due to the burden of forcing the drop across R3 to the VGS threshold of Q2. This is inconsequential given the target application of fan speed control. The amplifier is configured with a gain of +4, which is suitable for taking a 3.3V PWM signal and level shifting up to a 12V maximum output swing when the PWM signal approaches 100% duty cycle.
A CMXT3946 was selected for Q1 due to its dual complementary structure, but this could be substituted with discrete transistors with virtually no degradation in performance. A ZXM61P02 PMOS FET is a good choice for most single fans, and its 800mW max power dissipation allows it to drive fans up 133mA at 6V outputs. Because most fans act approximately resistively, a fan with a peak current of 250mA or less at 12V should be acceptable. Of course, the fan should be measured across its operating range to ensure the power dissipation is within the PMOS FET's specification. If driving multiple fans or high-current fans, an SOIC MOSFET should be substituted for the SOT23 device shown.
The circuit as shown does not have values for the input filter. Select a cutoff frequency, 1 / [6.28 * R * C] at least two decades below the PWM frequency to reduce the PWM ripple at the output.
A resistor value as high as 100k is acceptable due to the high input impedance of the circuit.
More Information
MAX6650:QuickView-- Full (PDF) Data Sheet-- Free Samples
MAX6651:QuickView-- Full (PDF) Data Sheet-- Free Samples
MAX6660:QuickView-- Full (PDF) Data Sheet-- Free Samples
MAX6661:QuickView-- Full (PDF) Data Sheet-- Free Samples
MAX6661:QuickView-- Full (PDF) Data Sheet-- Free Samples
MAX6668:QuickView-- Full (PDF) Data Sheet-- Free Samples
MAX6670:QuickView-- Full (PDF) Data Sheet-- Free Samples
MAX6684:QuickView-- Full (PDF) Data Sheet-- Free Samples。