连杆锻模的建模仿真加工及静力学分析
- 格式:doc
- 大小:1.97 MB
- 文档页数:16

本科毕业设计论文题目连杆工艺设计及有限元分析专业名称机械设计及其自动化学生姓名梁乐指导教师李郁毕业时间二零一四年六月目录摘要........................................................................................................................... - 2 -ABSTRACT .............................................................................................................. - 3 -第一章绪论............................................................................................................. - 3 -1.1课题研究的意义......................................................................................... - 3 -1.3论文的章节安排......................................................................................... - 5 -第二章连杆零件的分析......................................................................................... - 6 -2.1 连杆的作用................................................................................................ - 6 -2.2 连杆的结构特点........................................................................................ - 6 -2.3 连杆的工艺分析........................................................................................ - 6 -2.4 连杆的材料和毛坯.................................................................................... - 8 -第三章连杆零件的工艺编................................................................................... - 9 -3.1 连杆机械加工工艺过程............................................................................ - 9 -3.2连杆工艺过程的安排............................................................................... - 10 -3.3连杆加工工艺应考虑的问题................................................................... - 14 -................................................................................................................................. - 17 -第五章总结与展望............................................................................................. - 25 -5.1论文总结................................................................................................... - 25 -致谢..................................................................................................................... - 25 -参考文献................................................................................................................. - 26 -毕业设计小结......................................................................................................... - 26 -摘要连杆是主要传动件之一,本文主要论述了连杆的加工工艺及有限元分析。
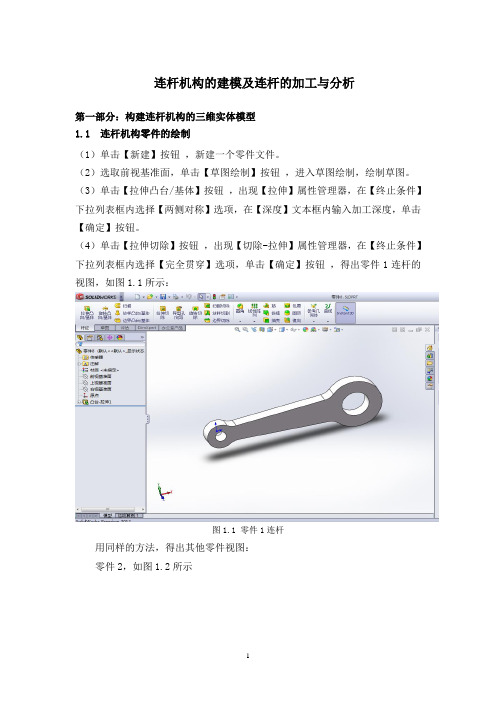
连杆机构的建模及连杆的加工与分析第一部分:构建连杆机构的三维实体模型1.1 连杆机构零件的绘制(1)单击【新建】按钮,新建一个零件文件。
(2)选取前视基准面,单击【草图绘制】按钮,进入草图绘制,绘制草图。
(3)单击【拉伸凸台/基体】按钮,出现【拉伸】属性管理器,在【终止条件】下拉列表框内选择【两侧对称】选项,在【深度】文本框内输入加工深度,单击【确定】按钮。
(4)单击【拉伸切除】按钮,出现【切除-拉伸】属性管理器,在【终止条件】下拉列表框内选择【完全贯穿】选项,单击【确定】按钮,得出零件1连杆的视图,如图1.1所示:图1.1 零件1连杆用同样的方法,得出其他零件视图:零件2,如图1.2所示零件3 如图1.3所示图1.3 零件3零件4如图1.4所示图1.4 零件4零件5如图1.5所示图1.5 零件51.2 连杆机构装配图的绘制将以上五个零件进行装配,得到连杆机构的装配图:如图1.6所示图1.6 连杆机构装配图第二部分:连杆的ansys分析2.1连杆工程分析的准备工作(1)连杆的计算分析模型,如图2.1所示图2.1 连杆的计算分析模型(2)材料参数设定弹性模量E=210Gpa;泊松比v=0.3;密度=7800(3)受力分析连杆有两个连轴孔,受力是主要约束大的那个口轴,然后是上表面受到一个向上应力。
2.2 操作步骤2.2.1定义单元类型和材料属性(1)设置计算类型,如图2.2所示ANSYS Main Menu: Preferences →select Structural →OK图2.2 设置计算类型(2)选择单元类型。
执行ANSYS Main Menu→Preprocessor →Element Type →Add/Edit/Delete →Add →select Solid Brick 8node 185 →OK Options…→select K3: Plane strain →OK→Close如图2.3所示,选择OK接受单元类型并关闭对话框。

连杆机构的仿真模型建立与验证连杆机构的仿真模型建立与验证连杆机构是一种常见的机械传动装置,广泛应用于各种机械系统中。
为了准确地描述和分析连杆机构的运动特性,我们可以建立一个仿真模型,并通过验证来验证该模型的准确性。
下面我将逐步介绍建立和验证连杆机构仿真模型的步骤。
第一步:确定系统的几何结构连杆机构的几何结构是建立仿真模型的基础。
首先,我们需要确定机构中各个连杆的长度、质量和惯性矩等参数。
此外,还需要确定连杆的连接方式,例如是否使用铰链连接或滑动连接。
第二步:建立系统的运动学模型连杆机构的运动学模型描述了连杆的运动规律。
我们可以利用几何关系和运动学原理建立系统的运动学方程。
根据连杆机构的类型,我们可以选择使用平面运动学或立体运动学模型。
第三步:建立系统的动力学模型连杆机构的动力学模型描述了连杆机构中各个部件之间的力学关系。
我们可以利用牛顿第二定律和动能定理等原理建立系统的动力学方程。
此外,还需要考虑外界施加在系统上的力和力矩。
第四步:选择仿真方法和软件工具建立连杆机构的仿真模型后,我们需要选择适当的仿真方法和软件工具进行仿真计算。
常用的仿真方法包括欧拉法、龙格-库塔法等。
常用的仿真软件工具包括MATLAB、Simulink、ADAMS等。
第五步:进行仿真计算和分析利用选择的仿真方法和软件工具,我们可以对建立的仿真模型进行计算和分析。
通过输入系统的初始条件和外界施加的力,可以得到系统的运动轨迹、速度、加速度等运动特性。
通过对仿真结果的分析,我们可以进一步了解连杆机构的运动规律。
第六步:验证仿真模型为了验证建立的仿真模型的准确性,我们可以将仿真结果与实际实验数据进行比较。
通过对比仿真结果和实验数据,可以评估仿真模型的准确性并进行修正。
如果仿真结果与实验数据吻合较好,说明建立的仿真模型具有较高的准确性。
综上所述,建立和验证连杆机构的仿真模型需要确定系统的几何结构、建立运动学和动力学模型、选择仿真方法和软件工具,进行仿真计算和分析,并将仿真结果与实验数据进行比较。

连杆锻模的建模、仿真加工及机械分析引言:连杆在工作中承受多向交变载荷的作用,要求具有很高的强度。
因此,连杆材料一般采用高强度碳钢和合金钢;如45钢、55钢、40Cr、40CrMnB等。
连杆毛坯制造方法的选择,主要根据生产类型、材料的工艺性(可塑性,可锻性)及零件对材料的组织性能要求,零件的形状及其外形尺寸,毛坯车间现有生产条件及采用先进的毛坯制造方法的可能性来确定毛坯的制造方法。
根据生产纲领为大量生产,连杆多用模锻制造毛坯。
连杆模锻形式有两种,一种是体和盖分开锻造,另一种是将体和盖锻成—体。
整体锻造的毛坯,需要在以后的机械加工过程中将其切开,为保证切开后粗镗孔余量的均匀,最好将整体连杆大头孔锻成椭圆形。
相对于分体锻造而言,整体锻造存在所需锻造设备动力大和金属纤维被切断等问题,但由于整体锻造的连杆毛坯具有材料损耗少、锻造工时少、模具少等优点,故用得越来越多,成为连杆毛坯的一种主要形式。
总之,毛坯的种类和制造方法的选择应使零件总的生产成本降低,性能提高。
本次作业中的连杆毛坯是用锻模整体加工的,本篇的基本内容包括:连杆毛坯的solidworks建模,基于Mastercam的连杆锻模的仿真加工,以及用Ansys对连杆锻模进行机械结构分析。
一、连杆毛坯的solidworks建模过程目标:建立如图1所示的连杆锻模毛坯的三维模型1.1建立基体的拉伸草图绘制两个半径为40和20的圆,两圆圆心距离为130;然后利用三点画圆弧命令绘制两圆的相切弧(可以先绘好之后选中弧与某一个圆,然后添加约束为相切),弧半径为240;然后利用修剪命令对多余的线段修键。
最终草图如图2所示。
拉伸草图1在拉伸草图1的基础上使用拉伸命令,设置拉伸深度为10,把魔角度值为5 。
结果如下图所示:1.2编辑凸台草图2,并拉伸在连杆大端绘制半径为40的圆,注意在绘制该草图时,要选中草图所在的面,然后点击主菜单上的进入草图命令,即重新生成草图,而不能在草图1的基础上进行草图编辑。

力学仿真连杆实验报告引言力学仿真是通过数学模型和计算机模拟等方法,对物体在外力作用下的运动状态进行模拟和分析的一种方法。
本文以连杆系统为对象,使用力学仿真软件进行实验,旨在通过模拟实验数据分析连杆系统在不同外力条件下的运动规律,验证和应用相关力学理论。
实验目的1. 通过设置不同的初始条件和外力条件,观察和分析连杆系统的运动规律;2. 验证力学理论的正确性;3. 探究连杆系统在不同外力条件下的运动特点。
实验装置与方法1. 实验软件:使用XXX力学仿真软件实现;2. 连杆模型:建立长度为L的连杆模型,设定质量和初始条件;3. 外力条件:设定连杆系统所受到的外力,如重力、弹簧力等;4. 实验过程:设置初始条件,调整参数,观察并记录连杆系统的运动状态和关键数据;5. 实验分析:通过仿真数据分析连杆系统的运动规律。
实验结果与分析1. 运动状态观察:通过实验软件运行仿真模型,观察连杆系统的运动状态。
采集数据包括连杆的位移、速度和加速度等信息。
2. 运动规律分析:对模拟实验数据进行分析,得出以下结论:- 全过程的机械能守恒:在不计外力损失的情况下,连杆系统的机械能守恒,即总机械能在运动过程中保持不变。
- 总动量守恒:如果系统受到的外力为零,则连杆系统的总动量在运动过程中保持不变。
- 合力和合力矩为零:在平衡或匀速直线运动的情况下,合力和合力矩均为零。
3. 外力条件影响:将外力条件改变为施加一个恒定的水平力,观察连杆系统的运动状态。
通过仿真实验可得出以下结论:- 增大外力会加快连杆系统的运动速度;- 外力方向的改变会导致连杆系统的运动方向改变;- 当外力等于零时,连杆系统会停止运动并达到平衡状态。
实验讨论与改进1. 讨论:通过实验结果,验证了力学理论对连杆系统运动规律的解释的准确性。
同时,本实验还发现在某些特定情况下,连杆系统运动的规律可能与理论预测有所不同,这可能是由于实验中未考虑到的因素或者模型假设不准确导致的。
机械結構的静力学分析与有限元仿真机械结构的静力学分析与有限元仿真近年来,机械结构的设计与分析在工程领域中扮演着至关重要的角色。
在设计阶段,静力学分析是不可或缺的一项任务,它能够帮助工程师预测和评估结构的受力情况,为后续的设计优化提供线索。
而有限元仿真则是一种基于数值计算的方法,可以模拟和分析机械结构在受力下的行为。
在进行机械结构的静力学分析时,首先需要确定受力和边界条件。
通过分析结构的外力和载荷情况,可以推导出结构的内力和位移。
然后,结构的受力分布和应力分布可以通过应用力学原理和静力平衡方程来求解。
在静力学分析中,经典的力学理论和公式被广泛应用,例如杨氏模量、泊松比和弹性模量等。
这些参数能够描述材料的力学特性,对于静力学分析起到了重要的作用。
但是,传统的静力学分析方法往往受到结构复杂性和假设条件的限制。
它们无法完全考虑到材料的非线性、结构的非均匀性和连接的非刚性等因素。
这就使得静力学分析结果仅具有预测性质,需要进一步进行验证和优化。
有限元仿真方法则应运而生,它通过离散化结构,并借助计算机模拟结构在受力下的行为。
有限元仿真是一种基于数值计算的方法,其基本思想是将复杂的结构分成许多简单的有限元单元,然后通过有限元法求解每个单元的受力情况,并将其整合为整个结构的受力分布。
有限元仿真的优势在于可以处理大规模和复杂的结构,同时考虑到非线性、非均匀性以及边界条件等。
通过有限元仿真,工程师可以更准确地预测结构的受力情况,优化设计方案,提高结构的性能。
有限元仿真的过程包括模型建立、材料参数设定、边界条件设定、网格划分、求解和结果分析等步骤。
在模型建立阶段,工程师需要根据实际情况绘制结构的几何模型,并定义结构的材料特性和加载条件。
然后,通过数值计算方法将结构分割成有限元单元,并为每个单元设置适当的网格划分。
接下来,工程师需要设定结构的边界条件,即结构受力的限制条件。
最后,通过数值计算方法求解每个有限元单元的受力情况,并综合分析结果。
基于UG软件的四连杆运动仿真分析的研究报告基于UG软件的四连杆运动仿真分析的研究报告摘要:本文以UG软件为工具,对四连杆运动进行了仿真分析,并对仿真结果进行了详细的描述和分析。
通过仿真分析发现,在不同的驱动方式、不同的转动速度等条件下,四连杆的运动状态、角度变化等均有显著差异,同时也发现四连杆的运动过程中存在一定的瞬时速度过快的情况,需要考虑加装减速装置。
关键词:UG软件;四连杆运动;仿真分析;瞬时速度过快一、引言四连杆运动是一种常见的机械运动形式,在机械设计、运动分析等领域中有着广泛的应用。
如何对四连杆运动进行分析和仿真,是机械工程领域的重要研究方向之一。
本文通过UG软件对四连杆运动进行仿真分析,并对仿真结果进行了详细的描述和分析,旨在对四连杆运动的研究提供一定的参考。
二、四连杆运动的基本原理四连杆运动是由四个连杆构成的运动链条,其中一个连杆为驱动杆,其余三个连杆为被动杆。
四连杆的运动状态受到驱动杆的驱动方式、转动速度等多种因素的影响,需要进行参数化变量的分析和仿真模拟。
三、UG软件仿真模拟1. 模型建立:首先利用UG软件进行四连杆模型的建立,包括杆件的三维建模、连接约束、驱动方式的设定等,得到初始状态下的四连杆结构。
2. 运动仿真:根据仿真目标和要求,对四连杆进行运动仿真,设定不同的驱动方式、不同的转动速度等条件,得到不同条件下的四连杆运动状态。
3. 结果分析:通过对仿真结果的分析,得出不同条件下四连杆的运动规律、运动状态、角度变化等,并结合实际应用需求,对仿真结果进行进一步的优化和改进。
四、仿真结果分析通过UG软件进行四连杆运动仿真分析,得到如下结论:1. 被动杆与驱动杆的角度变化规律:随着驱动杆的转动,被动杆与驱动杆之间的连接杆件的角度也在不断变化,角度变化曲线为抛物线状。
2. 驱动方式的影响:采用不同的驱动方式,四连杆的运动状态亦有较大的差异。
以摆线轮驱动方式为例,该方式下四连杆的运动状态较为平稳、稳定。
连杆锻模的建模、仿真加工及机械分析
引言:
连杆在工作中承受多向交变载荷的作用,要求具有很高的强度。
因此,连杆材料一般采用高强度碳钢和合金钢;如45钢、55钢、40Cr、40CrMnB等。
连杆毛坯制造方法的选择,主要根据生产类型、材料的工艺性(可塑性,可锻性)及零件对材料的组织性能要求,零件的形状及其外形尺寸,毛坯车间现有生产条件及采用先进的毛坯制造方法的可能性来确定毛坯的制造方法。
根据生产纲领为大量生产,连杆多用模锻制造毛坯。
连杆模锻形式有两种,一种是体和盖分开锻造,另一种是将体和盖锻成—体。
整体锻造的毛坯,需要在以后的机械加工过程中将其切开,为保证切开后粗镗孔余量的均匀,最好将整体连杆大头孔锻成椭圆形。
相对于分体锻造而言,整体锻造存在所需锻造设备动力大和金属纤维被切断等问题,但由于整体锻造的连杆毛坯具有材料损耗少、锻造工时少、模具少等优点,故用得越来越多,成为连杆毛坯的一种主要形式。
总之,毛坯的种类和制造方法的选择应使零件总的生产成本降低,性能提高。
本次作业中的连杆毛坯是用锻模整体加工的,本篇的基本内容包括:连杆毛坯的solidworks建模,基于Mastercam的连杆锻模的仿真加工,以及用Ansys对连杆锻模进行机械结构分析。
一、连杆毛坯的solidworks建模过程
目标:建立如图1所示的连杆锻模毛坯的三维模型
1.1建立基体的拉伸草图
绘制两个半径为40和20的圆,两圆圆心距离为130;然后利用三点画圆弧命令绘制两圆的相切弧(可以先绘好之后选中弧与某一个圆,然后添加约束为相切),弧半径为240;然后利用修剪命令对多余的线段修键。
最终草图如图2所示。
拉伸草图1
在拉伸草图1的基础上使用拉伸命令,设置拉伸深度为10,把魔角度值为5 。
结果如下图所示:
1.2编辑凸台草图2,并拉伸
在连杆大端绘制半径为40的圆,注意在绘制该草图时,要选中草图所在的面,然后点击主菜单上的进入草图命令,即重新生成草图,而不能在草图1的基础上进行草图编辑。
拉伸草图2
在草图2的基础上进行深度为20,拔模角度为5 的操作结果如下图:
同理,对连杆的小端绘制草图并进行拉伸命令,结果如下:
1.3绘制连杆中部凹槽的草图4,并拉伸切除
基本操作是:选中大小端中间的部分,然后进入草图绘制,选择实体转换命令,连杆底部的轮廓及大小端与底部相交的圆弧部分将变为草图,然后再此基础上对草图进行等距实体命令(圆弧等距10,基部轮廓等距6),修剪命令,圆角命令(圆角半径为6)。
如下图所示:
拉伸切除草图4
在特征选项下,选中草图4,然后选择拉伸切除命令,设置深度为6,角度为30,结果如下:
图5
1.4大小凸台球碗的生成
大凸台球碗的生成,先绘制草图如下:
图6
注意旋转轴与母线要构成封闭的区域,并且两者不能有交叉。
旋转的参数以图中的水平线为旋转轴旋转360度,结果如下图:
图7
小凸台球碗的生成:草图绘制如下,
图8旋转后如下
图9
1.5倒圆角
在特征选项下,点击倒圆角命令,然后选择大凸台与基本交线,在对话框中设置圆角半径为10;同理,到其他圆角:小凸台与基本拉伸体的倒角半径为5,所有棱边的圆角半径为3。
最终结果如下:
图10
二、连杆锻模的仿真加工
2.1加工前的准备
将一中建立的连杆锻造毛坯在solidworks中输出为Parasolid(*.x_t)格式文件以便于导入到Mastercam中加工。
导入后的连杆毛坯如下图所示:
图
11
在Mastercam中建立一个长方形(220*100),将连杆毛坯围绕在中心,如下
图:
图12
然后利用拉伸实体命令(拉伸50),建立一立方体将导入的连杆毛坯包围,再对两者进行布尔减运算,得到连杆锻模的下膜,如下图所示:
图13
2.2仿真加工
本次加工分为两个阶段:挖槽粗加工和平行精加工。
粗加工阶段的主要目标是大量去除材料,提高加工的效率,得到零件的粗略轮廓,然后利用精加工以满足零件设计的精度要求。
2.2.1挖槽粗加工
(1)选择直径为8mm的平底刀,下刀方式选择螺旋式下刀,加工余量设置为0.3mm,切削方式选择等距环切,生成的刀具路径如下图所示:
图14
2.2.2平行精加工
(1)刀具路径参数
连杆毛坯上的最小圆角为3mm,因此选择刀角半径为2.5mm的球刀,刀具的直径为5mm,具体参数值如下所示:
图15
(2)曲面加工参数
图16
(3)平行铣削参数
为了更好的消除平行式加工在加与工方向成90度夹角的垂直表面上加工质量较差的缺陷,将加工角度设置为45度。
具体参数设置如下所示:
图17
(4)最终的刀具路径如下图所示:
2.2.3仿真加工
图19加工中
图20最终结果
三、ansys仿真分析
3.1建立模型
建立模型包括设定分析作业名和标题;定义单元类型和实常数;定义材料属性;建立几何模型;划分有限元网格。
3.1.1设定分析作业名和标题
打开ansys,更改文件名为linkage,将solidworks中的连杆毛坯输出为parasolid格式,名字为linkage-1的文件,然后再ansys中打开,如下图所示:
图21
将标题名字改为static analysis of a rod,然后点击plot--replot,新的标题将在
左下角显示。
选择plotcontrol---style---solid model facet,然后在对话框的下拉列表中选择normal facet确定,然后选择plot下的replot按钮,将线框转化为实体。
如下图所示:
图22
3.1.2定义单元类型
选用十节点四面体实体结构单元Tet10Node 92,如下图:
图23
3.1.3定义实常数
十节点四面体实体结构单元Tet10Node 92单元不需要设置实常数。
3.1.4定义材料属性
设置材料的弹性模量为2.06e11,泊松比为0.3,如下图所示:
图24
3.1.5划分网格
选用Tet10Node 92单元对三维实体划分自由网格,如下图:
图25
3.2定义边界条件并求解
对大端顶面施加面约束,在小端左半圆周面施加大小为1000的面载荷,解算后的结果如下图所示:
图26
3.3查看求解结果
零件的在3.2所设定的约束下的应力分布如下图:
图27。