机械设计基础第12章蜗轮蜗杆
- 格式:ppt
- 大小:3.17 MB
- 文档页数:32

机械设计基础第12章蜗轮蜗杆蜗轮蜗杆是一种常见的传动机构,广泛应用于机械设备中。
蜗轮蜗杆传动具有体积小、传动比大、传动平稳等特点,在机械设计中有着重要的应用价值。
蜗轮蜗杆传动是一种通用型的不可逆传动,典型的结构包括蜗轮和蜗杆两个部分。
蜗轮是一种螺旋状的齿轮,其齿面与蜗杆的蜗杆螺旋面相配合。
蜗杆是一种具有螺旋线形状的轴,其作为传动元件,通过旋转运动驱动蜗轮。
蜗轮齿与蜗杆螺旋线的位置关系使得蜗轮只能顺时针旋转,而无法逆时针旋转。
这种结构特点决定了蜗轮蜗杆传动是一种不可逆传动。
蜗轮蜗杆传动的主要工作原理是靠蜗杆的螺旋面与蜗轮的齿轮面的啮合来实现传动。
在传动过程中,蜗杆通过旋转带动蜗轮转动,从而实现动力传递。
由于蜗杆的螺旋面与蜗轮的齿轮面接触面积小,所以传动效率相对较低。
为了提高传动效率,降低摩擦损失,需要在蜗轮齿面和蜗杆螺旋面之间添加润滑油。
蜗轮蜗杆传动具有很高的传动比,可达到1:40以上,因此在机械设备中常常使用蜗轮蜗杆传动来实现大速比的传动。
例如在起重机构中,通常采用蜗轮蜗杆传动来提高起重高度。
此外,蜗轮蜗杆传动还可以实现两个轴的不同速度传动,例如在机械车床中使用蜗轮蜗杆传动来实现工件的不同转速。
在机械设计中,蜗轮蜗杆传动的设计需要根据实际应用情况确定传动比、工作环境要求等参数。
首先需要确定传动比,在确定传动比的同时要考虑传动效率和传动正反转的能力。
其次,需要根据工作环境来选择蜗杆和蜗轮的材料,以提高传动的可靠性和耐用性。
还需要注意蜗杆和蜗轮的几何尺寸和配合精度,以保证传动的准确性和稳定性。
此外,在设计过程中还需要进行强度校核、轴承选择等工作,以确保传动的安全可靠。
总之,蜗轮蜗杆传动在机械设计中具有重要的应用价值。
它的特点是传动比大、传动平稳,适用于需要大速比、不可逆传动的场合。
在设计蜗轮蜗杆传动时,需要根据实际应用情况,确定传动比、材料、尺寸、配合精度等参数,以保证传动的稳定性和可靠性。
![机械设计基础课后习题答案[杨可桢等主编]第12章](https://uimg.taocdn.com/56739424ce2f0066f4332268.webp)
根底课程教学资料渊,您及彖人身体械、万事如意' 阂彖欢乐,祝福同学付财成长,,颜5取得好成灵为祖国奉献力*12-1 解:从快J 12-1的数据有: 加=4rn , 4・切廊,/ 1., 4 = 2, 4-39,y =11,UW \中央距Q 二兆加加,因此可以求得有关的几何尺寸如下:蜗轮的分度圆直径:% 二帽1 二 4x39 = 156 加加h =用=4mm , 欢送使用本资料,,版身体演、万事如意,阂彖欢乐.■同学们僮鼾夬乐的成长.早m 为祖国的崇荣昌.奉献自己的力*^ = 1,2m = 1.2 x4mm = 4.8mm4 =吨+2) =4xQ0+? =岖取幅给施囿吉区.1 " :1 । ■ M 内干匕"I 大I 贝I 曰L1T ♦ OJ '」 ' 、 『 那么!使用本金,祝悠身体®M 、声如意,g 陈庶同学们献|环的成长.…一 士 ii/i =- 2.4) = 4x(10 -2.4) = 30.4mm 蜗杆齿根圆直径:.■ 蜗轮齿根圆直径: *蜗杆轴向齿距和蜗轮端面齿距:蜗轮和蜗杆的齿顶高: 蜗轮和蜗杆的齿根高: 蜗杆齿顶圆直径:径向间隙:c=OJOM=OJOx4=Ota12-2图12.3解:〔1〕从图示看,这是一个左旋蜗杆,因此用右手握杆,四指“1 ,大拇指“】,可以得到从主视图上看,蜗轮顺时针旋转.〔见图12.3 〕〔2〕由题意,根据条件,可以得到蜗轮上的转矩为:=稼=彳眄/.x0.75 x50〔2«37JN*m蜗杆的圆周力与蜗轮的轴向力大小相等,方向相反,即:巧二咖N 蜗杆的轴向力与蜗轮的圆周力大小相等,方向相反,即:五“强产—375的心10斗3就加蜗杆的径向力与蜗轮的径向力大小相等,方向相反,即:其■耳广昂愀■犯Ox婚期7364国N 各力的方向如图12-3所示.T输出轴o12-3图12.4解:(1)先用箭头法标志出各轮的转向,如图12.5所示.由于锥齿轮轴向力指向大端,因此可以判断出蜗轮轴向力水平向右,从而判断出蜗杆的转向为顺时针,如图12.5所示.因此根据蜗轮和蜗杆的转向,用手握法可以判定蜗杆螺旋线为右旋.(2)各轮轴轴向力方向如图12.5所示.12-4 解:(1)根据材料确定许用应力.由于蜗杆选用如行,外表淬火,可估计蜗杆外表硬度.根据表12-4,= 200 MFts(2)选择蜗杆头数.4 = 2,那么传动比】二,四二闺」忖二川,查表12-2,选取z a =iz L = 18 x2 = 36(3 )确定蜗轮轴的转矩取,传动效率旷皿中9为加冏曲=9J5xltf xl2x7如和8(MW2xlQW•刖(4)确定模数和蜗杆分度圆直径按齿面接触强度计算礴 > X&022X103 =38686马瓦] 姒20『由表12-1查得a = 2,眼=5120,触加肌4 = Sta g = 10(5)确定中央距(6)确定几何尺寸蜗轮的分度圆直径: 蜗轮和蜗杆的齿顶高: 蜗轮和蜗杆的齿根高: 蜗杆齿顶圆直径: 蜗轮喉圆直径:, 蜗杆齿根圆直径:工二,工「犹『 蜗轮齿根圆直径:…二二了 蜗杆轴向齿距和蜗轮端面齿距: ::「:,「:「""一' ' '' ' "J"r = 0.20m = 0.20 x3 = l.jmm(7 )计算滑动速度吟% >rx80xl440 .Vi = ---- = ------------------ = 6.0288 m I s a =.,加(g +⑷=0 J x8© +3.=18物沏= mz a =8x36 = 283 m九二相■8神1h f = 1.2m=L2xta = 5)iod.=啕+2)=8x(10+2)=9fym径向间隙:60 x1000 60x10100E 2y = arctg^=雷cfg—= 11.30990q ID匕6.0288 , ,匕=—= --------- = 6」48M/scos/ cod 1,309?1加/5符合表12-4给出的使用滑动速度匕±(说明:此题答案不唯一,只要是按根本设计步骤,满足设计条件的答案,均算正确.)12-5解:一年根据300天计算,设每千瓦小时电价为a元.依题意损耗效率为因此用于损耗的费用为:& -a3皿x3 x8 x5fl = 100 00马x300 x24x" = 72口xl1元12-6解(i)重物上升加,卷筒转的圈数为:1快)」Q14xO2)-l,5g转;由于卷筒和蜗轮相联, 也即蜗轮转的圈数为L59圈;因此蜗杆转的转数为:1加建哂山9加1抵6转.(2)该蜗杆传动的蜗杆的导程角为:y ■ arctg—■: arctg—■ JJ104 30而当量摩擦角为,一':■5比拟可见7 >1,因此该机构能自锁.(3)手摇转臂做了输入功,等于输出功和摩擦损耗功二者之和.输出功小跪=撇xi = j咖焦耳;依题意此题摩擦损耗就是蜗轮蜗杆啮合损耗,因此啮合时的传动效率喻+用/.71.+1.乃那么输入功应为产加im =阈3.14焦耳.由于蜗杆转了63.6转,因此应有:乂=63 6犬2就即:二工;一二,)一可得:」「.「’•>' 一•〞•,图12.6d}=^]=10 x 42 = 420 mm 12-7解蜗轮的分度圆直径:4二网=1 0小用蜗轮和蜗杆的齿顶高:= 1.2m-1,2x10mm-12mm蜗轮和蜗杆的齿根高:蜗轮喉圆直径:4广税(4 + 2) = 1.x(42 +2)=440现用蜗杆齿根圆直径:於必-2MtM9-2耻66加蜗轮齿根圆直径:命=必-网=飒42-24)=3娴n蜗杆轴向齿距和蜗轮端面齿距:处二口广2 =^i=3.14xlO=3Lta 径向间隙:c=0 20m = 0.20 xlO = 2mm7蜗杆齿顶圆直径:4 产咆+今= 10x(9+2) = llta图 12.712-8解火=H ,取W 产1卿伽,歹= 0,8,那么那么油温f= %+Af=2.+42/=62,86℃,小于g 叱,满足使用要求. A" 1000 1000 x3xQ-调 a, 14x1- 42.86℃<[AJ]> 60 -70℃。


作业:12-3、12-6、12-8第十二章蜗杆传动一、蜗杆传动的特点1、传动比大、结构紧凑;2、传动平稳、噪声低;3、能实现自锁;4、传动效率低、发热大;5、成本高。
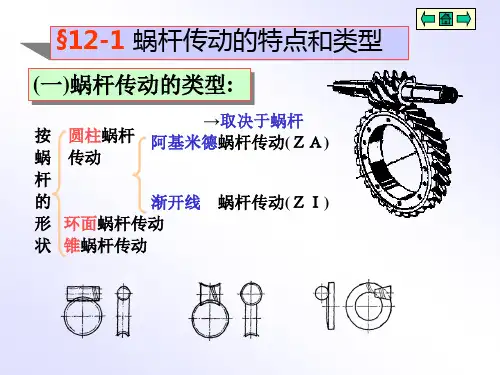
第一节概述二、蜗杆传动的类型⎪⎩⎪⎨⎧圆锥蜗杆圆弧蜗杆圆柱蜗杆按蜗杆的形状分⎩⎨⎧渐开线蜗杆阿基米德蜗杆按螺旋面的形状分⎩⎨⎧右旋蜗杆左旋蜗杆按螺旋线的方向分圆弧蜗杆圆锥蜗杆阿基米德蜗杆渐开线蜗杆一、正确啮合条件中间平面:对于两轴线垂直交错的阿基米德圆柱蜗杆传动,通过蜗杆轴线并垂直于蜗轮轴线的平面称为中间平面。
在中间平面内蜗杆蜗轮的啮合传动相当于渐开线齿轮与齿条的啮合传动。
正确啮合条件为:(旋向相同)βγααα=====t2a1t2a1mm m 第二节蜗杆传动的主要参数和几何尺寸二、主要参数和几何尺寸计算1.模数和压力角2. 蜗杆头数(齿数),蜗轮齿数3.蜗杆分度圆直径和导程角4.传动比5.中心距a1z 2z 1d iγ由于在中间平面上蜗杆传动相当于渐开线齿轮与齿条的传动,所以蜗杆传动的计算,以中间平面的参数为准,并直接应用齿轮传动的几何关系进行几何计算。
1.模数和压力角ααα====t2a1t2a1mm m 2. 蜗杆头数(齿数),蜗轮齿数1z 2z 由传动比并考虑效率来选定。
一般为=1~4。
①传递运动,要求传动比大,取小值。
②传递动力,取大值,传动效率和承载能力高;太多,蜗杆加工困难。
蜗轮齿数应根据传动比和选取。
不宜大于80。
1z 1z 1z 2z 1zi 11111a 1πππtan d mz d m z d p z ===γmqzm d ==γtan 11&为了限制蜗轮滚刀的数目并有利于标准化,规定了蜗杆分度圆直径的系列值,即将蜗杆直径系数、d 1标准化。
q 3.蜗杆分度圆直径和导程角1d γ5.中心距a蜗杆传动的标准中心距为1221()(z )22ma d d q =+=+4.传动比iγtan 121221d d z z n n i ===第三节蜗杆传动的受力分析11212d T F F a t ==αtg F F F t r r 221==22212d T F F T a ==21T T i η=式中:T 1 、T 2分别为作用在蜗杆与蜗轮上的扭矩。
机械设计基础第12章蜗轮蜗杆分析蜗轮蜗杆传动是一种常见的传动结构,具有传动比大、传动平稳、结构紧凑等优点。
在机械设计中,蜗轮蜗杆传动的分析和设计至关重要。
本文将详细介绍蜗轮蜗杆传动的原理、分析方法和设计要点。
1.原理蜗轮蜗杆传动是由蜗轮和蜗杆组成的一对斜面传动。
蜗轮有多个齿槽,蜗杆有一根螺旋斜面。
当蜗杆旋转时,通过螺旋斜面与蜗轮的齿槽作用,产生转动传递。
由于蜗杆螺旋斜面的斜度较大,所以每转动一圈,蜗轮只转动少量的角度,这就实现了较大的传动比。
2.分析方法蜗轮蜗杆传动的分析主要包括力学分析和几何分析。
力学分析:(1)传动比计算:蜗轮蜗杆传动的传动比可以根据蜗轮的齿数和蜗杆的斜度来计算,传动比=(蜗轮的齿数)/(蜗杆的斜度)。
(2)传动效率计算:蜗轮蜗杆传动的传动效率通常较低,主要受到摩擦损失和滑动损失的影响。
传动效率可以根据摩擦系数和滑动速度来计算。
(3)定位力计算:蜗轮蜗杆传动中,由于蜗轮与蜗杆之间的斜面接触,会产生一定的定位力。
定位力会严重影响传动的稳定性和精度,需进行合理计算和设计。
几何分析:(1)蜗轮参数计算:根据给定的传动比和蜗杆参数,可以计算蜗轮的齿数和齿轮分度圆直径。
(2)蜗杆参数计算:根据给定的传动比和蜗轮参数,可以计算蜗杆的斜度和蜗杆的导程。
(3)轴距计算:蜗轮和蜗杆的轴距是影响传动稳定性和效率的重要参数,需进行合理计算和确定。
3.设计要点(1)选取合适的材料:蜗轮蜗杆传动通常承受较大的扭矩和摩擦力,所以需选取能够承受高载荷和高摩擦的材料,如合金钢等。
(2)控制传动误差:蜗轮蜗杆传动的传动准确性较低,会产生一定的传动误差。
为了减小传动误差,需进行合理的加工和装配,并采用合适的润滑和控制措施。
(3)考虑安装和维修:蜗轮蜗杆传动通常安装在机械设备内部,为方便安装和维修,在设计时需要考虑蜗轮蜗杆传动的拆卸和装配便捷性。
总结:蜗轮蜗杆传动是一种重要的传动结构,在机械设计中具有广泛应用。
通过对蜗轮蜗杆传动的深入分析和合理设计,可以提高传动的效率和稳定性,满足机械设备的传动需求。

154第12章 蜗杆传动12.1 考点提要12.1.1 重要的术语和概念蜗杆的传动特点和分类、蜗杆的效率、蜗杆的头数、导程角、直径系数、12.1.2蜗杆传动的滑动速度和效率蜗杆主动时的机构效率为:)(v tg tg ϕγγη+-=)96.095.0( (12-1) 蜗杆的功率损耗一般由啮合摩擦,轴承损耗及零件搅油和飞溅损耗。
计算效率时,需要用到当量摩擦角v ϕ,其数值可通过arctgf v =ϕ算出,再结合相对滑动速度查表确定。
增加蜗杆的头数会使导程角增大,从而使效率增大,同时滑动速度也增大;如果增大蜗杆的分度圆直径将使导程角减小,从而使效率下降,而蜗杆的刚度提高。
蜗轮主动的效率为)(’v tg tg ϕγγη-= (12-2) 显然若v ϕγ≤,则0≤‘η,机构自锁,显然,如果反行程(蜗轮主动)自锁,正行程的效率(蜗杆主动)一定不大于50O O /。
蜗杆机构总的效率为啮合效率与轴承效率及搅油效率的乘积。
在设计之初,为近似求出蜗轮的转矩2T ,η数值可按表14-1数值估计。
表14-1 效率与蜗杆头数关系1Z 12 3 4 总效率0.7 0.8 0.85 0.9 影响蜗杆传动啮合效率的几何因素有:蜗杆的头数Z1,蜗杆的直径系数q﹑蜗杆分度圆直径〔或模数﹑Z1﹑q〕。
由于传动多是减速传动,所以蜗杆多处于高速级。
当蜗杆头数较少时,反行程效率低,机构自锁。
只有蜗杆头数多时才有较高的效率,反行程不自锁(可以蜗轮为主动件),但蜗轮和蜗杆的滑动速度过大,对材料要求很高,易出现磨损和胶合,因此很少采用。
12.1.3普通圆柱蜗杆传动的主要参数和几何尺寸计算蜗杆蜗轮的正确啮合条件有:1)蜗杆的轴向模数ma1=蜗轮的端面模数mt2且等于标准模数;2)杆的轴向压力角αa1=蜗轮的端面压力角αt2且等于标准压力角;3)蜗杆的导程角γ=蜗轮的螺旋角β且均可用γ表示,蜗轮与蜗轮的螺旋线方向相同。
通过蜗杆轴线并与涡轮端面垂直的平面称中间平面。
154第12章 蜗杆传动12.1 考点提要12.1.1 重要的术语和概念蜗杆的传动特点和分类、蜗杆的效率、蜗杆的头数、导程角、直径系数、12.1.2蜗杆传动的滑动速度和效率蜗杆主动时的机构效率为:)(v tg tg ϕγγη+-=)96.095.0( (12-1) 蜗杆的功率损耗一般由啮合摩擦,轴承损耗及零件搅油和飞溅损耗。
计算效率时,需要用到当量摩擦角v ϕ,其数值可通过arctgf v =ϕ算出,再结合相对滑动速度查表确定。
增加蜗杆的头数会使导程角增大,从而使效率增大,同时滑动速度也增大;如果增大蜗杆的分度圆直径将使导程角减小,从而使效率下降,而蜗杆的刚度提高。
蜗轮主动的效率为)(’v tg tg ϕγγη-= (12-2) 显然若v ϕγ≤,则0≤‘η,机构自锁,显然,如果反行程(蜗轮主动)自锁,正行程的效率(蜗杆主动)一定不大于50O O /。
蜗杆机构总的效率为啮合效率与轴承效率及搅油效率的乘积。
在设计之初,为近似求出蜗轮的转矩2T ,η数值可按表14-1数值估计。
表14-1 效率与蜗杆头数关系1Z 12 3 4 总效率0.7 0.8 0.85 0.9 影响蜗杆传动啮合效率的几何因素有:蜗杆的头数Z1,蜗杆的直径系数q﹑蜗杆分度圆直径〔或模数﹑Z1﹑q〕。
由于传动多是减速传动,所以蜗杆多处于高速级。
当蜗杆头数较少时,反行程效率低,机构自锁。
只有蜗杆头数多时才有较高的效率,反行程不自锁(可以蜗轮为主动件),但蜗轮和蜗杆的滑动速度过大,对材料要求很高,易出现磨损和胶合,因此很少采用。
12.1.3普通圆柱蜗杆传动的主要参数和几何尺寸计算蜗杆蜗轮的正确啮合条件有:1)蜗杆的轴向模数ma1=蜗轮的端面模数mt2且等于标准模数;2)杆的轴向压力角αa1=蜗轮的端面压力角αt2且等于标准压力角;3)蜗杆的导程角γ=蜗轮的螺旋角β且均可用γ表示,蜗轮与蜗轮的螺旋线方向相同。
通过蜗杆轴线并与涡轮端面垂直的平面称中间平面。