机械设计基础第六版第12章 蜗杆传动
- 格式:ppt
- 大小:2.19 MB
- 文档页数:37

机械设计基础第12章蜗轮蜗杆蜗轮蜗杆是一种常见的传动机构,广泛应用于机械设备中。
蜗轮蜗杆传动具有体积小、传动比大、传动平稳等特点,在机械设计中有着重要的应用价值。
蜗轮蜗杆传动是一种通用型的不可逆传动,典型的结构包括蜗轮和蜗杆两个部分。
蜗轮是一种螺旋状的齿轮,其齿面与蜗杆的蜗杆螺旋面相配合。
蜗杆是一种具有螺旋线形状的轴,其作为传动元件,通过旋转运动驱动蜗轮。
蜗轮齿与蜗杆螺旋线的位置关系使得蜗轮只能顺时针旋转,而无法逆时针旋转。
这种结构特点决定了蜗轮蜗杆传动是一种不可逆传动。
蜗轮蜗杆传动的主要工作原理是靠蜗杆的螺旋面与蜗轮的齿轮面的啮合来实现传动。
在传动过程中,蜗杆通过旋转带动蜗轮转动,从而实现动力传递。
由于蜗杆的螺旋面与蜗轮的齿轮面接触面积小,所以传动效率相对较低。
为了提高传动效率,降低摩擦损失,需要在蜗轮齿面和蜗杆螺旋面之间添加润滑油。
蜗轮蜗杆传动具有很高的传动比,可达到1:40以上,因此在机械设备中常常使用蜗轮蜗杆传动来实现大速比的传动。
例如在起重机构中,通常采用蜗轮蜗杆传动来提高起重高度。
此外,蜗轮蜗杆传动还可以实现两个轴的不同速度传动,例如在机械车床中使用蜗轮蜗杆传动来实现工件的不同转速。
在机械设计中,蜗轮蜗杆传动的设计需要根据实际应用情况确定传动比、工作环境要求等参数。
首先需要确定传动比,在确定传动比的同时要考虑传动效率和传动正反转的能力。
其次,需要根据工作环境来选择蜗杆和蜗轮的材料,以提高传动的可靠性和耐用性。
还需要注意蜗杆和蜗轮的几何尺寸和配合精度,以保证传动的准确性和稳定性。
此外,在设计过程中还需要进行强度校核、轴承选择等工作,以确保传动的安全可靠。
总之,蜗轮蜗杆传动在机械设计中具有重要的应用价值。
它的特点是传动比大、传动平稳,适用于需要大速比、不可逆传动的场合。
在设计蜗轮蜗杆传动时,需要根据实际应用情况,确定传动比、材料、尺寸、配合精度等参数,以保证传动的稳定性和可靠性。
《机械设计基础》第六版重点、复习资料《机械设计基础》知识要点绪论;基本概念:机构,机器,构件,零件,机械第 1 章: 1)运动副的概念及分类2)机构自由度的概念3)机构具有确定运动的条件4)机构自由度的计算第 2 章: 1)铰链四杆机构三种基本形式及判断方法。
2)四杆机构极限位置的作图方法3)掌握了解:极限位置、死点位置、压力角、传动角、急回特性、极位夹角。
4)按给定行程速比系数设计四杆机构。
第 3 章: 1)凸轮机构的基本系数。
2)等速运动的位移,速度,加速度公式及线图。
3)凸轮机构的压力角概念及作图。
第 4 章: 1)齿轮的分类(按齿向、按轴线位置)。
2)渐开线的性质。
3)基本概念:节点、节圆、模数、压力角、分度圆,根切、最少齿数、节圆和分度圆的区别。
4)直齿轮、斜齿轮基本尺寸的计算;直齿轮齿廓各点压力角的计算;m = p / π的推导过程。
5)直齿轮、斜齿轮、圆锥齿轮的正确啮合条件。
第 5 章: 1)基本概念:中心轮、行星轮、转臂、转化轮系。
2)定轴轮系、周转轮系、混合轮系的传动比计算。
第9 章:1)掌握:失效、计算载荷、对称循环变应力、脉动循环变应力、许用应力、安全系数、疲劳极限。
了解:常用材料的牌号和名称。
第10 章 : 1)螺纹参数 d、 d1、 d2、 P、 S、ψ、α、β及相互关系。
2)掌握:螺旋副受力模型及力矩公式、自锁、摩擦角、当量摩擦角、螺纹下行自锁条件、常用螺纹类型、螺纹联接类型、普通螺纹、细牙螺纹。
3)螺纹联接的强度计算。
第11 章: 1)基本概念:轮齿的主要失效形式、齿轮常用热处理方法。
2)直齿圆柱齿轮接触强度、弯曲强度的计算。
3)直齿圆柱齿轮、斜齿圆柱齿轮、圆锥齿轮的作用力(大小和方向)计算及受力分析。
第 12 章 : 1)蜗杆传动基本参数:m a1、m t2、γ 、β、q、 P a、d1、 d2、 V S及蜗杆传动的正确啮合条件。
2)蜗杆传动受力分析。
第13章: 1)掌握:带传动的类型、传动原理及带传动基本参数:d1、 d2、 L d、a、α1、α2、 F1、 F2、 F0 2)带传动的受力分析及应力分析:F1、 F2、 F0、σ1、σ2、σC、σb及影响因素。
第12章蜗杆传动12.1复习笔记一、蜗杆传动的特点和类型1.特点(1)优点包括:①传动比大;②结构紧凑;③传动平稳;④噪声较小。
(2)缺点①传动效率较低;②为了减摩耐磨,蜗轮齿圈常需用青铜制造,成本较高。
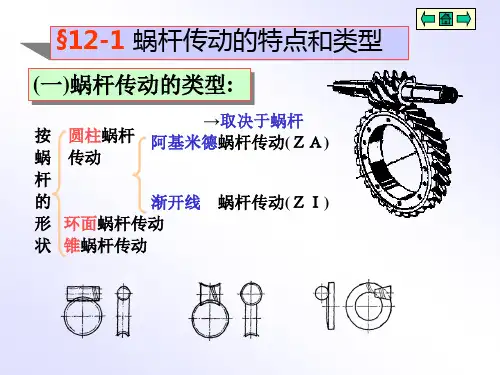
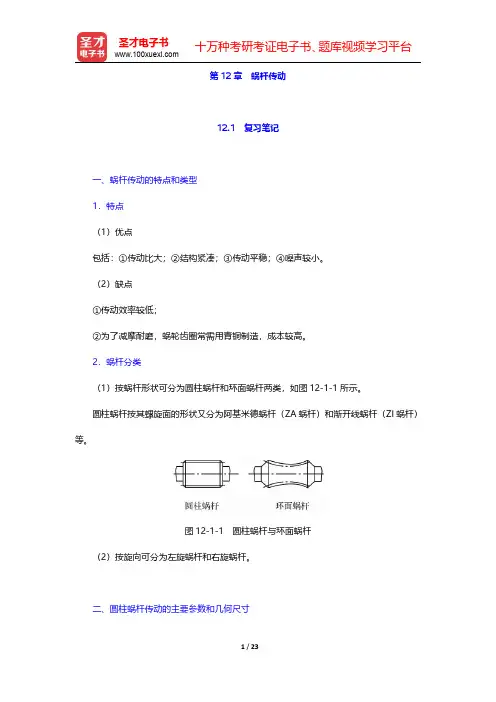
2.蜗杆分类(1)按蜗杆形状可分为圆柱蜗杆和环面蜗杆两类,如图12-1-1所示。
圆柱蜗杆按其螺旋面的形状又分为阿基米德蜗杆(ZA蜗杆)和渐开线蜗杆(ZI蜗杆)等。
图12-1-1圆柱蜗杆与环面蜗杆(2)按旋向可分为左旋蜗杆和右旋蜗杆。
二、圆柱蜗杆传动的主要参数和几何尺寸1.圆柱蜗杆传动的主要参数(1)模数m 和压力角α蜗杆传动的设计计算都以中间平面的参数和几何关系为准。
它们正确啮合条件是:蜗杆轴向模数ma1和轴向压力角1a a 应分别等于蜗轮端面模数mt2和端面压力角2t a ,即12a t m m m ==,12a t a a =压力角标准值20α=︒,ZA 蜗杆取轴向压力角为标准值;ZI 蜗杆取法向压力角为标准值。
在两轴交错为90︒的蜗杆传动中,蜗杆分度圆柱上的导程角γ应等于蜗轮分度圆柱上的螺旋角β,且两者的旋向必须相同,即=γβ(2)传动比i 12、蜗杆头数1z 和蜗轮齿数2z ,121221n z in z ==①蜗杆的头数z 1通常蜗杆头数z 1=1、2、4。
若要得到大传动比,可取z 1=1,但传动效率较低。
传递功率较大时,为提高效率可采用多头蜗杆,取z 1=2或4。
②蜗轮齿数z 2为了避免蜗轮轮齿发生根切,z 2不应小于26,但也不宜大于80。
若z 2过大,会使结构尺寸过大,蜗杆长度也随之增加,致使蜗杆刚度和啮合精度下降。
(3)蜗杆直径系数q 和导程角γ蜗杆直径系数是指蜗杆分度圆直径与模数的比值,计算公式为1d qm =导程角的计算公式为11111tan πx z p z m z d d qγ===式中,x p ——轴向齿距;1d ——蜗杆分度圆直径;m ——模数;1z ——螺旋线数。
154第12章 蜗杆传动12.1 考点提要12.1.1 重要的术语和概念蜗杆的传动特点和分类、蜗杆的效率、蜗杆的头数、导程角、直径系数、12.1.2蜗杆传动的滑动速度和效率蜗杆主动时的机构效率为:)(v tg tg ϕγγη+-=)96.095.0( (12-1) 蜗杆的功率损耗一般由啮合摩擦,轴承损耗及零件搅油和飞溅损耗。
计算效率时,需要用到当量摩擦角v ϕ,其数值可通过arctgf v =ϕ算出,再结合相对滑动速度查表确定。
增加蜗杆的头数会使导程角增大,从而使效率增大,同时滑动速度也增大;如果增大蜗杆的分度圆直径将使导程角减小,从而使效率下降,而蜗杆的刚度提高。
蜗轮主动的效率为)(’v tg tg ϕγγη-= (12-2) 显然若v ϕγ≤,则0≤‘η,机构自锁,显然,如果反行程(蜗轮主动)自锁,正行程的效率(蜗杆主动)一定不大于50O O /。
蜗杆机构总的效率为啮合效率与轴承效率及搅油效率的乘积。
在设计之初,为近似求出蜗轮的转矩2T ,η数值可按表14-1数值估计。
表14-1 效率与蜗杆头数关系1Z 12 3 4 总效率0.7 0.8 0.85 0.9 影响蜗杆传动啮合效率的几何因素有:蜗杆的头数Z1,蜗杆的直径系数q﹑蜗杆分度圆直径〔或模数﹑Z1﹑q〕。
由于传动多是减速传动,所以蜗杆多处于高速级。
当蜗杆头数较少时,反行程效率低,机构自锁。
只有蜗杆头数多时才有较高的效率,反行程不自锁(可以蜗轮为主动件),但蜗轮和蜗杆的滑动速度过大,对材料要求很高,易出现磨损和胶合,因此很少采用。
12.1.3普通圆柱蜗杆传动的主要参数和几何尺寸计算蜗杆蜗轮的正确啮合条件有:1)蜗杆的轴向模数ma1=蜗轮的端面模数mt2且等于标准模数;2)杆的轴向压力角αa1=蜗轮的端面压力角αt2且等于标准压力角;3)蜗杆的导程角γ=蜗轮的螺旋角β且均可用γ表示,蜗轮与蜗轮的螺旋线方向相同。
通过蜗杆轴线并与涡轮端面垂直的平面称中间平面。

作业:12-3、12-6、12-8第十二章蜗杆传动一、蜗杆传动的特点1、传动比大、结构紧凑;2、传动平稳、噪声低;3、能实现自锁;4、传动效率低、发热大;5、成本高。
第一节概述二、蜗杆传动的类型⎪⎩⎪⎨⎧圆锥蜗杆圆弧蜗杆圆柱蜗杆按蜗杆的形状分⎩⎨⎧渐开线蜗杆阿基米德蜗杆按螺旋面的形状分⎩⎨⎧右旋蜗杆左旋蜗杆按螺旋线的方向分圆弧蜗杆圆锥蜗杆阿基米德蜗杆渐开线蜗杆一、正确啮合条件中间平面:对于两轴线垂直交错的阿基米德圆柱蜗杆传动,通过蜗杆轴线并垂直于蜗轮轴线的平面称为中间平面。
在中间平面内蜗杆蜗轮的啮合传动相当于渐开线齿轮与齿条的啮合传动。
正确啮合条件为:(旋向相同)βγααα=====t2a1t2a1mm m 第二节蜗杆传动的主要参数和几何尺寸二、主要参数和几何尺寸计算1.模数和压力角2. 蜗杆头数(齿数),蜗轮齿数3.蜗杆分度圆直径和导程角4.传动比5.中心距a1z 2z 1d iγ由于在中间平面上蜗杆传动相当于渐开线齿轮与齿条的传动,所以蜗杆传动的计算,以中间平面的参数为准,并直接应用齿轮传动的几何关系进行几何计算。
1.模数和压力角ααα====t2a1t2a1mm m 2. 蜗杆头数(齿数),蜗轮齿数1z 2z 由传动比并考虑效率来选定。
一般为=1~4。
①传递运动,要求传动比大,取小值。
②传递动力,取大值,传动效率和承载能力高;太多,蜗杆加工困难。
蜗轮齿数应根据传动比和选取。
不宜大于80。
1z 1z 1z 2z 1zi 11111a 1πππtan d mz d m z d p z ===γmqzm d ==γtan 11&为了限制蜗轮滚刀的数目并有利于标准化,规定了蜗杆分度圆直径的系列值,即将蜗杆直径系数、d 1标准化。
q 3.蜗杆分度圆直径和导程角1d γ5.中心距a蜗杆传动的标准中心距为1221()(z )22ma d d q =+=+4.传动比iγtan 121221d d z z n n i ===第三节蜗杆传动的受力分析11212d T F F a t ==αtg F F F t r r 221==22212d T F F T a ==21T T i η=式中:T 1 、T 2分别为作用在蜗杆与蜗轮上的扭矩。

154第12章 蜗杆传动12.1 考点提要12.1.1 重要的术语和概念蜗杆的传动特点和分类、蜗杆的效率、蜗杆的头数、导程角、直径系数、12.1.2蜗杆传动的滑动速度和效率蜗杆主动时的机构效率为:)(v tg tg ϕγγη+-=)96.095.0( (12-1) 蜗杆的功率损耗一般由啮合摩擦,轴承损耗及零件搅油和飞溅损耗。
计算效率时,需要用到当量摩擦角v ϕ,其数值可通过arctgf v =ϕ算出,再结合相对滑动速度查表确定。
增加蜗杆的头数会使导程角增大,从而使效率增大,同时滑动速度也增大;如果增大蜗杆的分度圆直径将使导程角减小,从而使效率下降,而蜗杆的刚度提高。
蜗轮主动的效率为)(’v tg tg ϕγγη-= (12-2) 显然若v ϕγ≤,则0≤‘η,机构自锁,显然,如果反行程(蜗轮主动)自锁,正行程的效率(蜗杆主动)一定不大于50O O /。
蜗杆机构总的效率为啮合效率与轴承效率及搅油效率的乘积。
在设计之初,为近似求出蜗轮的转矩2T ,η数值可按表14-1数值估计。
表14-1 效率与蜗杆头数关系1Z 12 3 4 总效率0.7 0.8 0.85 0.9 影响蜗杆传动啮合效率的几何因素有:蜗杆的头数Z1,蜗杆的直径系数q﹑蜗杆分度圆直径〔或模数﹑Z1﹑q〕。
由于传动多是减速传动,所以蜗杆多处于高速级。
当蜗杆头数较少时,反行程效率低,机构自锁。
只有蜗杆头数多时才有较高的效率,反行程不自锁(可以蜗轮为主动件),但蜗轮和蜗杆的滑动速度过大,对材料要求很高,易出现磨损和胶合,因此很少采用。
12.1.3普通圆柱蜗杆传动的主要参数和几何尺寸计算蜗杆蜗轮的正确啮合条件有:1)蜗杆的轴向模数ma1=蜗轮的端面模数mt2且等于标准模数;2)杆的轴向压力角αa1=蜗轮的端面压力角αt2且等于标准压力角;3)蜗杆的导程角γ=蜗轮的螺旋角β且均可用γ表示,蜗轮与蜗轮的螺旋线方向相同。
通过蜗杆轴线并与涡轮端面垂直的平面称中间平面。