机器人运动分析中的矩阵变换 (1)0031
- 格式:pdf
- 大小:2.96 MB
- 文档页数:52
机器人旋转矩阵公式哎呀,一提到“机器人旋转矩阵公式”,可能很多人都会觉得这是个超级复杂、超级难懂的东西。
但别慌,咱今天就来好好唠唠这个话题。
我记得有一次,我去参加一个科技展。
在那里,我看到了各种各样神奇的机器人展示。
其中有一个小小的机器人,它能够灵活地转动身体,完成各种复杂的动作,比如快速转身、精准定位等等。
当时我就特别好奇,这背后到底是啥原理让它能这么厉害呢?其实啊,机器人旋转矩阵公式就是解开这个谜团的关键钥匙。
咱们先来简单理解一下啥是旋转矩阵。
想象一下,机器人就像一个站在舞台上的舞者,而旋转矩阵就是指挥这个舞者如何转动的“指令”。
这个矩阵里的数字,就像是一个个精确的舞步标记,告诉机器人要朝哪个方向转,转多少角度。
比如说,一个二维的旋转矩阵,它可以表示机器人在平面上的转动。
就好像机器人要在一个大大的棋盘上移动,这个矩阵就决定了它是向左还是向右,是转 90 度还是 180 度。
再来说说三维的旋转矩阵,这可就更复杂一些啦。
想象机器人在一个立体的空间里,不仅能前后左右移动,还能上下翻转。
这时候的旋转矩阵,就得同时考虑三个方向的转动,就像要同时指挥机器人的手、脚和脑袋一起协调动作。
那这些旋转矩阵公式是怎么来的呢?这可不是凭空想象出来的,而是数学家们经过无数次的思考和计算得出来的。
他们就像是一群超级聪明的探险家,在数学的海洋里不断摸索,终于找到了这些隐藏的宝藏。
在实际应用中,机器人旋转矩阵公式可太重要了。
比如说在工业生产线上,那些精准操作的机器人手臂,要靠这些公式来保证每次抓取和放置物品的准确性;在医疗领域,手术机器人要依靠它们来精确地到达病灶位置;甚至在我们的日常生活中,扫地机器人能避开障碍物,也是因为有这些公式在背后默默发挥作用。
不过,要真正掌握这些公式可不是一件容易的事儿。
得有扎实的数学基础,还得有足够的耐心和细心。
有时候,一个小小的计算错误,可能就会让机器人的动作变得乱七八糟。
就像我之前看到的那个在科技展上的小机器人,它背后的工程师们一定是花费了大量的时间和精力,去调试和优化那些旋转矩阵公式,才让它能在舞台上如此精彩地表演。
机器人学的矩阵《机器人学中的矩阵:一份超有趣的指南》嘿,朋友,今天咱们来唠唠机器人学里的矩阵这玩意儿。
你可别一听矩阵就觉得头疼,其实没那么可怕的。
我有个朋友小李,那家伙刚开始接触机器人学的时候,看到矩阵就像看到外星符号一样。
有一次我们在一块儿学习,他瞅着那些方方正正的矩阵数字,眼睛都快瞪出来了。
他就特无奈地跟我说:“这矩阵到底是个啥呀,就一堆数字摆这儿,能有啥用?”我就笑他,我说:“你可别小瞧这堆数字,这矩阵啊,就像是机器人的魔法密码。
”在机器人学里呀,矩阵就像一个超级管家。
比如说机器人的运动控制。
我另一个朋友小张,他在搞一个小机器人项目,想要让机器人的手臂精准地抓取东西。
这时候矩阵就派上大用场了。
机器人手臂每个关节的运动,都可以用矩阵来描述呢。
我就跟小张说:“你看啊,这矩阵就像给机器人手臂的每个关节都画了一张详细的地图,告诉它怎么动,动多少。
”小张一开始还半信半疑,等他慢慢把矩阵运算搞明白后,那机器人手臂就像被施了魔法一样,精准地抓取东西,他可高兴了,还说:“哎呀,这矩阵还真神了。
”再说说机器人的坐标变换。
想象一下,机器人在一个空间里活动,它得知道自己在啥位置吧,还得知道周围东西的位置。
这时候矩阵就像一个翻译官。
我和我的同学们一起讨论这个事儿的时候,有个同学就说:“这就好比我们在一个迷宫里,矩阵就是那个给我们指出哪条路通向哪儿的小箭头。
”不同的坐标系之间的转换,靠的就是矩阵这个神奇的工具。
比如说从机器人自身的坐标系转换到世界坐标系,矩阵就把这两个看似不同的世界给连接起来了。
还有机器人的视觉处理方面。
我认识一个搞机器人视觉的大神老王。
他跟我说,在处理图像的时候,矩阵就像一个大筛子。
图像里的每个像素点都可以看成是矩阵里的一个元素。
老王说:“你知道吗?就像我们挑豆子一样,通过矩阵的运算,我们可以把图像里有用的信息筛选出来,把那些没用的杂质去掉。
”比如说要识别图像里的一个物体,矩阵就能够通过各种变换和计算,把这个物体的特征凸显出来,就像在一堆豆子里准确地挑出那颗特别的豆子。
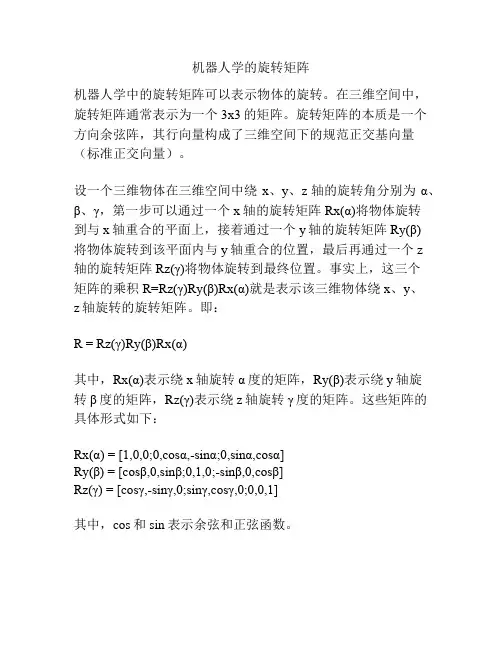
机器人学的旋转矩阵
机器人学中的旋转矩阵可以表示物体的旋转。
在三维空间中,旋转矩阵通常表示为一个3x3的矩阵。
旋转矩阵的本质是一个方向余弦阵,其行向量构成了三维空间下的规范正交基向量(标准正交向量)。
设一个三维物体在三维空间中绕x、y、z轴的旋转角分别为α、β、γ,第一步可以通过一个x轴的旋转矩阵Rx(α)将物体旋转
到与x轴重合的平面上,接着通过一个y轴的旋转矩阵Ry(β)
将物体旋转到该平面内与y轴重合的位置,最后再通过一个z
轴的旋转矩阵Rz(γ)将物体旋转到最终位置。
事实上,这三个
矩阵的乘积R=Rz(γ)Ry(β)Rx(α)就是表示该三维物体绕x、y、
z轴旋转的旋转矩阵。
即:
R = Rz(γ)Ry(β)Rx(α)
其中,Rx(α)表示绕x轴旋转α度的矩阵,Ry(β)表示绕y轴旋
转β度的矩阵,Rz(γ)表示绕z轴旋转γ度的矩阵。
这些矩阵的具体形式如下:
Rx(α) = [1,0,0;0,cosα,-sinα;0,sinα,cosα]
Ry(β) = [cosβ,0,sinβ;0,1,0;-sinβ,0,cosβ]
Rz(γ) = [cosγ,-sinγ,0;sinγ,cosγ,0;0,0,1]
其中,cos和sin表示余弦和正弦函数。

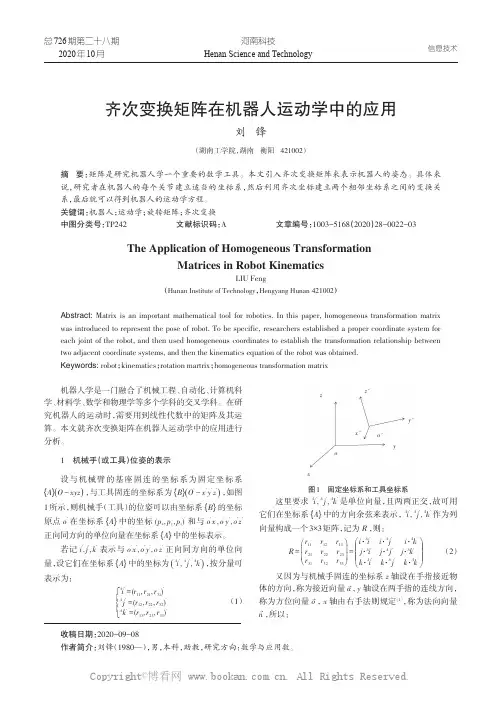
旋转矩阵在机器人运动学中的应用摘要:旋转矩阵是机器人学的重要的数学工具,在机器人运动学中应用甚广,非常适合机器人的机构描述与运动学分析。
在介绍有关性质的基础上,本文还给出了部分算例,可为机器人学科的教学与科研提供有一的支持。
关键词:旋转矩阵机器人运动学引言:机器人机构的运动学和动力学分析涉及到各个关节的空间位置和姿态以及关节之间的空间关系。
矩阵的旋转变换不仅仅应用到机器人上,还涉及到了很多领域,比如彩票,再次不对此进行深入分析。
正文:首先介绍下机器人坐标系统,刚体运动是指物体上任意亮点之间距离保持不变的运动,机器人运动学、动力学及其控制,实质上就是研究刚体运动的问题。
其次介绍下几个概念:位置和姿态:要全面的确定一个刚体在三位空间的状态就需要有三个位置的自由度和三个姿态自由度。
刚体姿态的描述可以是用:横滚、俯仰和侧摆来实现,我们将物体的六个自由度的状态成为物体的位姿。
刚体运动的坐标表示:早在19世纪初期,Chasles已经证明:刚体从一位置到另一位置的运动可通过绕某一直线的转动加上沿平行于该直线的移动得到。
在基坐标系B和手坐标系H的原点补充和,且姿态也不同的情况下r0,r,rp,R的含义如下图::规定一个过度坐标系C,使C的坐标原点与H系重合,而C的姿态和B保持一致。
可得到rp=ro+rc=r0+Rr.齐次坐标变换:在此我们不再介绍齐次坐标的由来,由齐次坐标得到的上面r到rp的变换的表达式为:T矩阵为齐次变换矩阵,建成齐次矩阵。
齐次矩阵T是个4x4的矩阵,一般的能够用来表示平移、旋转、伸缩的变换。
可以把T的4部分表示为:其中R3x3是表示两坐标系间的旋转关系的旋转矩阵,f1x3矩阵表示沿3根坐标轴的透视变换,f3x1=[a b c]的转置,表示两坐标系间的平移,右下角的演艺元素矩阵k1x1为使物体产生总体变换的比例因子,在机器人运动学中,透视变换值总是取零,而比例因子则总是取1,征缴变换都是线性变换,故其次变换是用其次平移变换也可以解释为两个向量之和。
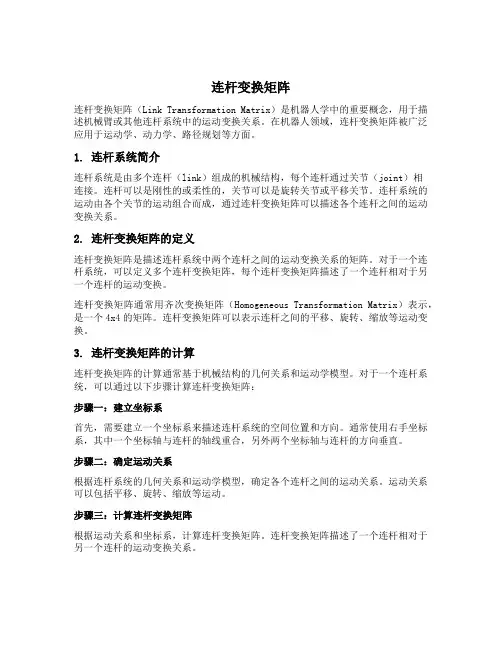
连杆变换矩阵连杆变换矩阵(Link Transformation Matrix)是机器人学中的重要概念,用于描述机械臂或其他连杆系统中的运动变换关系。
在机器人领域,连杆变换矩阵被广泛应用于运动学、动力学、路径规划等方面。
1. 连杆系统简介连杆系统是由多个连杆(link)组成的机械结构,每个连杆通过关节(joint)相连接。
连杆可以是刚性的或柔性的,关节可以是旋转关节或平移关节。
连杆系统的运动由各个关节的运动组合而成,通过连杆变换矩阵可以描述各个连杆之间的运动变换关系。
2. 连杆变换矩阵的定义连杆变换矩阵是描述连杆系统中两个连杆之间的运动变换关系的矩阵。
对于一个连杆系统,可以定义多个连杆变换矩阵,每个连杆变换矩阵描述了一个连杆相对于另一个连杆的运动变换。
连杆变换矩阵通常用齐次变换矩阵(Homogeneous Transformation Matrix)表示,是一个4x4的矩阵。
连杆变换矩阵可以表示连杆之间的平移、旋转、缩放等运动变换。
3. 连杆变换矩阵的计算连杆变换矩阵的计算通常基于机械结构的几何关系和运动学模型。
对于一个连杆系统,可以通过以下步骤计算连杆变换矩阵:步骤一:建立坐标系首先,需要建立一个坐标系来描述连杆系统的空间位置和方向。
通常使用右手坐标系,其中一个坐标轴与连杆的轴线重合,另外两个坐标轴与连杆的方向垂直。
步骤二:确定运动关系根据连杆系统的几何关系和运动学模型,确定各个连杆之间的运动关系。
运动关系可以包括平移、旋转、缩放等运动。
步骤三:计算连杆变换矩阵根据运动关系和坐标系,计算连杆变换矩阵。
连杆变换矩阵描述了一个连杆相对于另一个连杆的运动变换关系。
步骤四:组合连杆变换矩阵对于一个连杆系统,可以通过组合各个连杆的变换矩阵,得到整个连杆系统的运动变换关系。
通过连杆变换矩阵,可以计算机械臂末端执行器的位置和姿态。
4. 连杆变换矩阵的应用连杆变换矩阵在机器人学中有着广泛的应用,主要包括以下几个方面:机械臂运动学连杆变换矩阵可以用于描述机械臂的运动学模型。


矩阵运算几何变换通常是用矩阵运算方法实现的,就是将描述模型或图形的几何信息的点列坐标矩阵乘以某种变换矩阵,从而获得一组新的点列坐标矩阵,再由这组新的点列坐标生成新的模型或图形。
即如下形式:形体的原点列坐标矩阵 几何变换矩阵 形体的新点列坐标矩阵⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡n nnz y x z y x z y x .........222111 × ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡i hgf e d c b a = ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡'''''''''n nnz y x z y x z y x .........222111因此,下面就矩阵运算的基本要点作简要介绍。
设有一个m 行n 列矩阵A其中被称为第i 个行向量,被称为第j 个列向量。
一) 矩阵的加法运算设两个矩阵A 和B 都是m x n 的,把他们对应位置的元素相加而得到的矩阵叫做A 、B 的和,记为A +B只有在两个矩阵的行数和列数都相同时才能加法。
二) 数乘矩阵用数k 乘矩阵A 的每一个元素而得的矩阵叫做k 与A 之积,记为 kA三) 矩阵的乘法运算只有当前一矩阵的列数等于后一矩阵的行数时两个矩阵才能相乘。
,矩阵C中的每一个元素。
下面让我们用一个简单的例子来说明,设A为2x3的矩阵,B为3x2的矩阵,则两者的乘积为:四) 单位矩阵对于一个nxn的矩阵,如果它的对角线上的各个元素均为1,其余元素都为0,则该矩阵称为单位阵,记为In。
对于任意mxn的矩阵恒有五) 矩阵的转置交换一个矩阵Amxn的所有的行列元素,那么所得到的nxm的矩阵被称为原有矩阵的转置,记为AT:显然但是对于矩阵的积:六) 矩阵的逆对于一个nxn的方阵A,果存在一个nxn的方阵B,使得AB=BA=In,则称B是A的逆,记为,A则被称为非奇异矩阵。
A的逆矩阵=A的伴随矩阵/A的行列式A的伴随矩阵:主对角元直接对调,非对角元变为相反数。
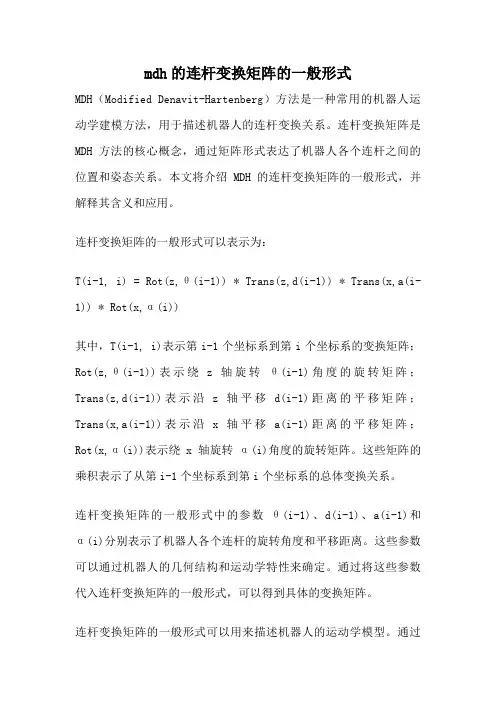
mdh的连杆变换矩阵的一般形式MDH(Modified Denavit-Hartenberg)方法是一种常用的机器人运动学建模方法,用于描述机器人的连杆变换关系。
连杆变换矩阵是MDH方法的核心概念,通过矩阵形式表达了机器人各个连杆之间的位置和姿态关系。
本文将介绍MDH的连杆变换矩阵的一般形式,并解释其含义和应用。
连杆变换矩阵的一般形式可以表示为:T(i-1, i) = Rot(z,θ(i-1)) * Trans(z,d(i-1)) * Trans(x,a(i-1)) * Rot(x,α(i))其中,T(i-1, i)表示第i-1个坐标系到第i个坐标系的变换矩阵;Rot(z,θ(i-1))表示绕z轴旋转θ(i-1)角度的旋转矩阵;Trans(z,d(i-1))表示沿z轴平移d(i-1)距离的平移矩阵;Trans(x,a(i-1))表示沿x轴平移a(i-1)距离的平移矩阵;Rot(x,α(i))表示绕x轴旋转α(i)角度的旋转矩阵。
这些矩阵的乘积表示了从第i-1个坐标系到第i个坐标系的总体变换关系。
连杆变换矩阵的一般形式中的参数θ(i-1)、d(i-1)、a(i-1)和α(i)分别表示了机器人各个连杆的旋转角度和平移距离。
这些参数可以通过机器人的几何结构和运动学特性来确定。
通过将这些参数代入连杆变换矩阵的一般形式,可以得到具体的变换矩阵。
连杆变换矩阵的一般形式可以用来描述机器人的运动学模型。
通过将各个连杆变换矩阵的乘积相乘,可以得到机器人末端执行器的坐标变换关系。
这个变换关系可以用来计算机器人末端执行器在工作空间中的位置和姿态,从而实现机器人的正向和逆向运动学分析。
在机器人的正向运动学分析中,已知机器人的关节角度,可以通过连杆变换矩阵的一般形式来计算机器人末端执行器的位置和姿态。
这个过程涉及到了连杆变换矩阵的乘积和矩阵运算,需要注意矩阵的顺序和运算规则,以确保计算结果的准确性。
在机器人的逆向运动学分析中,已知机器人末端执行器的位置和姿态,需要求解机器人的关节角度。
机器人运动学建模旋转矩阵机器人运动学建模旋转矩阵随着科技的不断进步和人工智能的快速发展,越来越多的机器人被引入到工业生产和日常生活中。
机器人在工业生产中的使用很多时候需要执行精确的动作和运动,因此需要对机器人进行运动学建模,以便更好地控制其动作和轨迹。
而机器人运动学建模的核心就是旋转矩阵。
一、机器人运动学机器人运动学又称为机器人空间运动学,是研究机器人在运动中各个部位位置与时间变化关系的学科。
机器人运动学分为正运动学和逆运动学两种,前者是由给定各个部位的运动状态,通过正演得到机械臂末端的位置和姿态,所谓的末端位置和姿态,通常是以笛卡尔坐标系下的三个空间位置变量和三个空间角姿态变量︰ [X, Y, Z,., , , ],其中 , , 分别代表绕笛卡尔坐标系中的X、Y、Z轴转到目标末端姿态的角度,即为姿态变量(也称欧拉角变量)。
后者是已知机械臂末端的位置和姿态,要求求出各个部位的运动状态,所谓的逆运动学问题。
二、旋转矩阵机器人运动学建模的核心之一就是旋转矩阵。
旋转矩阵是指是用来描述刚体的旋转变换的一个正交矩阵。
矩阵的每一列就是描述坐标系中一个基向量,它们互相垂直,必须统一长度,且每个向量应该 be 一个标准正交基向量,既应该具有单位长度又应该互相垂直。
矩阵中的每一个元素是基向量在另一坐标系中的投影(点积)。
因此,三维空间中的旋转变换可以通过一个 3X3 的旋转矩阵来表示,其中某一列就是描述坐标系中一个基向量。
考虑到二维空间中的旋转变换可以通过一个2x2的旋转矩阵(cos, sin、-sin, cos)来表示,我们可以将三维的旋转矩阵写成:cos(a)cos(b) cos(a)sin(b)sin(c)-sin(a)cos(c) sin(a)sin(b)cos(c)+cos(a)sin(c)-sin(a)cos(b) sin(a)sin(b)sin(c)+cos(a)cos(c) cos(a)sin(b)cos(c)-sin(a)sin(c)-sin(b) cos(b)sin(c) cos(b)cos(c)其中a,b,c是三个角度,表示绕X,Y,Z轴的旋转角度。
机器人运动学中变换矩阵左乘右乘的理解1. 引言在机器人运动学中,变换矩阵是一个核心概念,它用于描述机器人末端执行器相对于基座的位置和姿态。
而在进行变换矩阵的计算过程中,左乘和右乘往往是容易引起混淆的地方。
本文将深入探讨机器人运动学中变换矩阵左乘右乘的理解,帮助读者更加深入地理解这一重要概念。
2. 左乘和右乘的概念在机器人运动学中,一个坐标系相对于另一个坐标系的变换通常是通过一个4x4的变换矩阵来表示的。
假设我们有两个变换矩阵A和B,它们分别表示两个坐标系之间的变换关系。
当我们想要对某个向量或点进行这两个变换的组合时,就涉及到了左乘和右乘的操作。
•左乘:表示在原有变换的基础上进行相对位移或旋转。
即先进行左边的变换,再进行右边的变换。
•右乘:表示在原有变换的基础上进行绝对位移或旋转。
即先进行右边的变换,再进行左边的变换。
3. 左乘和右乘的比喻我们可以用日常生活中的例子来更好地理解左乘和右乘的概念。
想象一辆汽车在高速公路上行驶,这辆汽车可以进行前进和转向的操作。
•左乘:相当于在车身自身坐标系上进行操作,比如车辆自身转向或者车辆自身前进。
•右乘:相当于在世界坐标系上进行操作,比如在道路上的绝对位置调整或者全局导航的位移。
通过这个比喻,我们可以更清晰地理解左乘和右乘的区别,以及它们在机器人运动学中的应用。
4. 变换矩阵的左乘和右乘计算方法在机器人运动学中,变换矩阵的左乘和右乘的具体计算方法也是至关重要的。
在实际操作中,我们需要根据特定的场景和问题,选择合适的左乘和右乘的顺序,才能得到准确的结果。
假设有两个变换矩阵A和B,它们的表示如下: A = [[R1, p1], [0, 1 ]] B = [[R2, p2], [0, 1 ]]其中R表示旋转矩阵,p表示平移向量。
•左乘(A左乘B)的计算方法:先将A和B相乘,得到新的变换矩阵C,即C = A * B。
•右乘(B右乘A)的计算方法:先将B和A相乘,得到新的变换矩阵D,即D = B * A。