交互式多模型机动目标跟踪方法的仿真
- 格式:pdf
- 大小:194.62 KB
- 文档页数:3
信号/数据处理交互式多模型机动目标跟踪方法的仿真3尹 瑞,王荫槐,王 峰(南京电子技术研究所, 南京210013)【摘要】 分析和研究利用CV模型和C A模型交互、CV模型和Singer模型交互、C V模型和“当前”统计模型交互分别对单机动目标进行跟踪。
通过大量的计算机模拟仿真,比较了不同的模型组合在各种参数情况下的滤波性能,并且比较其和卡尔曼滤波(Singer模型)性能的优劣性,得出了一些有意义的结论。
【关键词】 多目标跟踪;卡尔曼滤波;“当前”统计模型;机动目标跟踪中图分类号:T N957 文献标识码:AI n teracti n g M ulti ple M odel F ilter i n g A lgor ith m forM aneuver i n g Target Track i n gYI N Rui,WANG Yin2huai,WANG Feng(Nanjing Research I nstitute of Electr onics Technol ogy, Nanjing210013,China)【Abstract】 A ne w I nteractingMulti p le Model(I M M)filtering alg orith m is p resented in this paper.Constant vel ocity model interactering with constant accelerati on model,constant vel ocity model interactering with Singer model,constant vel ocity model inter2 actering with“Current”statistical model are used f or target tracking.Thr outh a mass of co mputer e mulat oring,filtering capability in different instance is co mpared.And filtering capability of I M M is co mpared with filtering capability of Kal m an filtering.s o me useful conclusi on is obtained.【Key words】I M M;Kal m an filtering;“current”statistical model;maneuvering target tracking0 引 言机动目标跟踪的方法,按跟踪滤波所采用的模型数量,可分为单模型跟踪和多模型跟踪两大类。



第45卷 第12期2023年12月系统工程与电子技术SystemsEngineeringandElectronicsVol.45 No.12December2023文章编号:1001 506X(2023)12 4005 08 网址:www.sys ele.com收稿日期:20220920;修回日期:20230312;网络优先出版日期:20230427。
网络优先出版地址:https:∥kns.cnki.net/kcms/detail/11.2422.TN.20230427.1351.010.html 通讯作者.引用格式:陈维义,何凡,刘国强,等.变结构交互式多模型滤波和平滑算法[J].系统工程与电子技术,2023,45(12):4005 4012.犚犲犳犲狉犲狀犮犲犳狅狉犿犪狋:CHENWY,HEF,LIUGQ,etal.Variablestructureinteractivemultiplemodelfilteringandsmoothingalgorithm[J].SystemsEngineeringandElectronics,2023,45(12):4005 4012.变结构交互式多模型滤波和平滑算法陈维义1,何 凡1, ,刘国强2,毛伟伟2(1.海军工程大学兵器工程学院,湖北武汉430030;2.海军士官学校兵器系,安徽蚌埠233000) 摘 要:针对机动目标跟踪问题,提出了一种变结构交互式多模型滤波和平滑算法。
首先,对多模型滤波和平滑问题进行了简单描述,并给出了前向交互式多模型滤波和后向交互式多模型平滑的数学模型;然后,建立了变结构交互式多模型算法的精确模型,模型子集之间并行独立运行,通过选取概率最高的模型子集的状态估计作为最终的估计结果;最后,对变结构交互式多模型算法的滤波数据进行平滑处理,得到了变结构交互式多模型滤波和平滑算法。
所提算法将前向滤波和后向平滑相结合,提高了目标跟踪精度。


第1篇YOLOv11目标检测模型1. 模型介绍:YOLOv11是由Ultralytics公司开发的新一代目标检测算法,其在COCO数据集上实现了较高的平均精度(mAP)得分,同时参数数量比YOLOv8m少22%,计算效率更高。
2. 实验目的:本实验旨在实现一个目标检测方案,使用YOLOv11算法适配不同分辨率(超高、高、节能)的输入,并将其预处理为统一的640x640分辨率,以识别图片中的数字区域。
3. 实验方法:- 网络结构:对比YOLOv8和YOLOv11模型组成,分析核心模块和注意力模块的区别。
- 数据预处理:将不同分辨率的输入预处理为统一的640x640分辨率。
- 实验设置:设置实验参数,如迭代次数、采样间隔等。
- 实验效果:分析准确率、内存占用、功耗和推理时间等指标。
4. 实验结果:- 准确率:YOLOv11在COCO数据集上实现了较高的mAP得分。
- 内存占用:YOLOv11参数数量较少,计算效率高,内存占用较低。
- 功耗:由于计算效率高,YOLOv11的功耗较低。
- 推理时间:YOLOv11的推理时间较短。
基于EKF的目标跟踪实例1. 模型介绍:该实例实现了基于IMM算法的目标跟踪,使用三种不同的运动模型(匀速直线运动、左转弯和右转弯)来预测目标的位置,并通过卡尔曼滤波进行状态估计。
2. 代码介绍:- 使用MATLAB编写代码,实现基于IMM算法的目标跟踪。
- 代码包含仿真参数设置、模型量测矩阵、模型过程噪声加权矩阵等。
3. 实验结果:- 通过仿真验证了IMM算法在目标跟踪中的有效性。
总结YOLOv11和基于EKF的目标跟踪实例都是计算机视觉领域中的重要技术。
YOLOv11在目标检测方面具有较高的准确率和计算效率,而基于EKF的目标跟踪实例在目标跟踪方面具有较高的精度。
这些技术在实际应用中具有广泛的应用前景。
第2篇一、实验背景随着人工智能技术的快速发展,模型目标算法在计算机视觉、机器人控制等领域得到了广泛应用。
基于IMM-MHT算法的杂波环境多机动目标跟踪邵俊伟;同伟;单奇【摘要】针对杂波环境下多机动目标的跟踪问题,提出将交互多模型(IMM)算法与多假设跟踪(MHT)算法结合,并运用Murty算法和假设树修剪方法进行假设生成和假设管理,提高IMM-MHT算法的实用性.仿真结果表明,IMM-MHT算法具有较高的正确关联率和较好的跟踪稳定性,且与只使用单模型的MHT算法相比,具有更好的跟踪精度.【期刊名称】《舰船电子对抗》【年(卷),期】2014(037)002【总页数】5页(P87-90,93)【关键词】数据关联;多假设跟踪;交互多模型【作者】邵俊伟;同伟;单奇【作者单位】中国电子科技集团公司第38研究所,合肥230088;陆军驻中电集团38所军事代表室,合肥230088;中国电子科技集团公司第38研究所,合肥230088【正文语种】中文【中图分类】TP957.510 引言随着战场环境的日趋复杂以及目标机动性能的日益提升,如何在杂波环境下跟踪机动目标正成为雷达数据处理系统要应对的关键问题之一。
传统数据关联算法,如最近邻[1](NN)、概率数据关联[2](PDA)、联合概率数据关联[3](JPDA)等,以当前扫描周期内的量测为基础进行数据关联,若某一扫描周期内的关联结果与真实情况有较大差别,则之后的跟踪过程常会发生错误,甚至丢失目标。
多假设跟踪[4](MHT)的关联结果不仅取决于当前扫描周期内的量测数据,而且还与历史量测信息有关。
对不能确定的关联,会形成多种逻辑假设,并用后续的量测数据来解决这种不确定性。
在理想条件下,MHT是最优的数据关联算法,可以有效地解决杂波环境下的数据关联问题。
但是,MHT算法所需的计算和存储资源会随着量测数和跟踪步数的增长呈指数增加,若要实际应用,还需要有效的假设管理技术。
对机动目标,以单一的运动模型来刻画其运动过程,往往和实际情况有偏差,最终会由于模型失配导致跟踪误差增大甚至跟踪失败。
三维高速机动目标跟踪交互式多模型算法
彭冬亮;郭云飞;薛安克
【期刊名称】《控制理论与应用》
【年(卷),期】2008(25)5
【摘要】对三维机动目标,尤其是高速机动目标的跟踪一直是目标跟踪领域的重点和难点,通过二维或解耦模型扩展并不一定能满足精度要求.提出了一种基于常速模型、"当前"统计模型、带约束的三维常速率协同转弯模型的交互式多模型算法.通过对包括匀加速模型、Singer模型、"当前"统计模型在内的不同模型组合进行Monte-Carlo仿真比较表明本算法对三维高速机动目标跟踪是有效性,并具有很好的实用性.
【总页数】6页(P831-836)
【作者】彭冬亮;郭云飞;薛安克
【作者单位】杭州电子科技大学,信息与控制研究所,浙江,杭州,310018;杭州电子科技大学,信息与控制研究所,浙江,杭州,310018;杭州电子科技大学,信息与控制研究所,浙江,杭州,310018
【正文语种】中文
【中图分类】TP273
【相关文献】
1.用于机动目标跟踪的自适应交互式多模型算法 [J], 王越;周德云;刘建生;赵凯;杨维
2.交互式多模型算法在机动目标跟踪中的应用 [J], 李辉;赵敏;张安;卢莺
3.基于 IMM 的三维机动目标跟踪算法研究 [J], 董晓斐;邵巍
4.强机动目标跟踪自适应交互式多模型算法 [J], 王亚平;彭东亮;薛安克
5.一种面向机动目标跟踪的交互式多模型算法 [J], 王美健;吴小俊
因版权原因,仅展示原文概要,查看原文内容请购买。
文章编号:167326338(2009)0320170204GPS 车载导航的交互式多模型算法王忠军1,2(1.信息工程大学测绘学院,河南郑州 450052;2.河南省交通厅,河南郑州 450000)摘要:GPS 动态定位数据的处理广泛采用卡尔曼滤波技术,而应用卡尔曼滤波要求运动模型准确可靠,但由于载体真实运动的复杂多变,任何单一模型都难以全面描述,致使单一模型的滤波都容易出现模型误差。
针对这一问题,将机动目标跟踪领域广泛应用的交互式多模型算法引入到车载导航中。
通过分析车辆的运动特点,选取匀速直线模型和当前统计模型进行交互;同时考虑到车载终端计算能力有限,将状态变量在各方向解耦。
仿真显示,在机动时改进的算法和单一模型的自适应算法基本相当,但在非机动时改进的算法明显占优。
关 键 词:全球定位系统;车载导航;卡尔曼滤波;交互式多模型;匀速直线模型中图分类号:P208 文献标识码:A DOI 编码:10.3969/j.issn.167326338.2009.03.004IMM Algorithm for GPS N avigation of V ehicleWAN G Zhong 2jun 1,2(1.I nstitute of S urvey ing and M a p ping ,I nf ormation Engineering Universit y ,Zhengz hou 450052,China ;m unication Department of Henan Provice ,Zhengz hou 450000,China )Abstract :Kalman filters were used extensively in data processing of GPS dynamic positioning ,while the appli 2cation of Kalman Filters required that the dynamic model was practical and reliable ,but in actual the vehicle motion was complex and changef ul ,which made it was impossible to express the motion by single model ,any 2how model errors often occured in the filters based on single model.In view of the problem ,the interacting multiple model (IMM )algorithm ,which was used extensively in maneuvering target tracking ,was introducted to vehicle navigation.The constant velocity (CV )model and current statistics (CS )model were selected ac 2cording to vehicle movement characteristics ,and the state variables of every direction were decoupled in order to decrease calculation amount.Simulation results showed that ,as the vehicle was maneuvering ,the perform 2ances of the algorithm developed and the adaptive algorithm based on single model were almost same ,but while the vehicle was non 2maneuvering ,the former was superior to the latter obviously.K ey w ords :GPS ;vehicle navigation ;Kalman filtering ;IMM system model ;constant velocity model 全球定位系统(GPS )由于能够迅速、准确、全天候地提供定位导航和授时信息,目前正广泛应用于各种领域。
信号/数据处理交互式多模型机动目标跟踪方法的仿真3尹 瑞,王荫槐,王 峰(南京电子技术研究所, 南京210013)【摘要】 分析和研究利用CV模型和C A模型交互、CV模型和Singer模型交互、C V模型和“当前”统计模型交互分别对单机动目标进行跟踪。
通过大量的计算机模拟仿真,比较了不同的模型组合在各种参数情况下的滤波性能,并且比较其和卡尔曼滤波(Singer模型)性能的优劣性,得出了一些有意义的结论。
【关键词】 多目标跟踪;卡尔曼滤波;“当前”统计模型;机动目标跟踪中图分类号:T N957 文献标识码:AI n teracti n g M ulti ple M odel F ilter i n g A lgor ith m forM aneuver i n g Target Track i n gYI N Rui,WANG Yin2huai,WANG Feng(Nanjing Research I nstitute of Electr onics Technol ogy, Nanjing210013,China)【Abstract】 A ne w I nteractingMulti p le Model(I M M)filtering alg orith m is p resented in this paper.Constant vel ocity model interactering with constant accelerati on model,constant vel ocity model interactering with Singer model,constant vel ocity model inter2 actering with“Current”statistical model are used f or target tracking.Thr outh a mass of co mputer e mulat oring,filtering capability in different instance is co mpared.And filtering capability of I M M is co mpared with filtering capability of Kal m an filtering.s o me useful conclusi on is obtained.【Key words】I M M;Kal m an filtering;“current”statistical model;maneuvering target tracking0 引 言机动目标跟踪的方法,按跟踪滤波所采用的模型数量,可分为单模型跟踪和多模型跟踪两大类。
单模型跟踪的目的是建立一种较为“理想”的机动目标运动模型来描述目标运动状态的变化过程,即运动目标位置、速度和加速度的变化,如果单一的运动模型描述与所跟踪的目标的运动情形相匹配,则可以实现对目标的跟踪。
但是在实际过程中,目标的运动状态是复杂多变的,用单一的模型来跟踪处理机动情况,有时会产生较大的误差[1]。
雷达网数据处理中的目标跟踪模型有CV模型、C A 模型、Singer模型、“当前”统计模型,其中Singer模型和“当前”统计模型分别是全局统计模型和当前时刻统计模型的典型代表。
由于这些模型自身的局限,单独采用一个模型进行滤波精度不高。
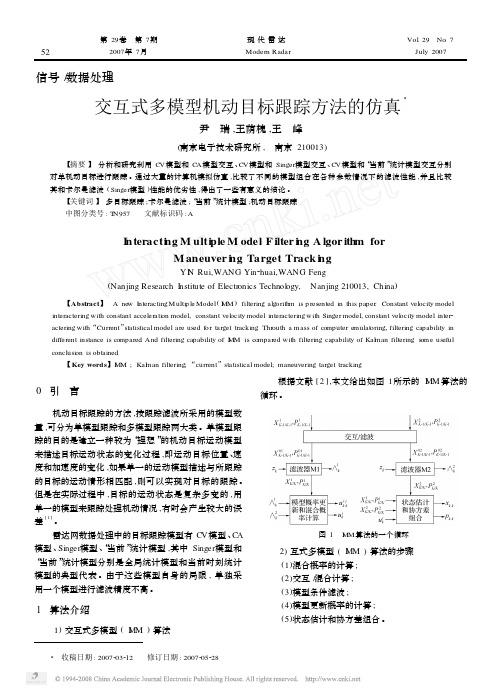
1 算法介绍1)交互式多模型(I M M)算法根据文献[2],本文给出如图1所示的I M M算法的循环。
图1 I M M算法的一个循环2)互式多模型(I M M)算法的步骤(1)混合概率的计算;(2)交互/混合计算;(3)模型条件滤波;(4)模型更新概率的计算;(5)状态估计和协方差组合。
25第29卷 第7期 2007年7月现代雷达Modern Radar Vol.29 No.7July2007 3收稿日期:2007203212 修订日期:20072052282 交互式多模型跟踪仿真及其性能分析环境1:目标起始状态:X 0=〔9000m ,-180m /s,130000m,-180m /s,9000m,10m /s 〕,目标运动过程历时100s,初始协方差矩阵为:p .x =〔8000,0,0;0,164,0;0,0,6〕;p .y =〔2500,0,0;0,169,0;0,0,4〕;p .z =〔2500,0,0;0,169,0;0,0,1〕。
在前30次采样周期中,目标作匀加速运动,X 方向加速度为1m /s 2,Y 方向加速度为2m /s 2,Z 方向加速度为3m /s 2。
在后70s 采样周期中,目标作匀速运动。
统计N =100次。
采样周期T =1s 。
分析:CV 模型和C A 模型交互滤波的距离均值误差为9.0474m,均方误差为0.6838m 。
其滤波后的距离均方误差明显小于滤波之前。
C V 模型和Singer 模型交互滤波的均值误差为8.7142m,均方误差为0.6978m 。
此模型滤波的距离均方误差略大于CV 模型和C A 模型交互滤波的均方误差。
C V 模型和“当前”模型交互滤波的均值误差为8.7850m,均方误差为0.7263m 。
此模型滤波的距离均方误差既大于CV 模型和C A 模型交互滤波的距离均方误差也大于C V 模型和Singer 模型交互滤波的距离均方误差。
同时,比较以上三种多模型滤波与单模型滤波的性能。
Kal m an (Singer 模型)滤波的均值误差为9.8307m,均方误差为1.0735m 。
误差均大于以上三种多模型滤波的误差。
以下把C V 和C A 模型交互滤波、CV 和Singer 模型交互滤波、CV 和“当前”模型交互滤波以及Kal m an (Singer 模型)滤波的五条曲线作比较,比较结果如图2和图3所示。
图2 五种模型均值误差比较 图3 五种模型均方误差比较曲线1为滤波前白噪声;曲线2为C V 和C A 模型交互;曲线3为CV 和Singer 模型交互;曲线4为C V 和“当前”模型交互;曲线5为Kal m an (Singer )模型。
比较以上各图可以得到,在处理非机动问题时,在30s 以后的匀速运动中,三种多模型的交互滤波都能很快的收敛,且其均方根位置误差比较相近。
说明了在跟踪匀速运动的目标时,不能体现出某两种模型交互的优越性。
而在前30s 匀加速的运动过程中,CV 模型和C A 模型交互的跟踪误差曲线出现了比较大的波动,降低了此模型在30s 内的跟踪精度。
由图中还可以看出,Kal 2man (Singer 模型)的跟踪曲线在100s 内都是比较平稳的,没有出现较大的波动,在前30s 内,它的均方根位置误差与CV 模型和Singer 模型交互、C V 模型和“当前”模型交互比较接近的。
而在后70s 中,其误差又明显比后两种交互多模型要大。
但总的来说以上各曲线都能较快的收敛,都可以用来处理非机动目标的跟踪。
环境2:目标起始状态:X 0=〔9000m,-180m /s,130000m,-180m /s,9000m,10m /s 〕,目标运动过程历时100s,初始协方差矩阵为:p .x =〔8000,0,0;0,164,0;0,0,6〕;p .y =〔2500,0,0;0,169,0;0,0,4〕;p .z =〔2500,0,0;0,169,0;0,0,1〕。
其中Singer 模型方法和当前模型方法的自相关时间常数取0.025。
统计N =100次。
采样周期T =1s 。
目标发生机动时刻和加速度大小如下表所示。
表1 目标机动运动情况表加速度目标发生机动的时刻T /s31384961656681X 方向/m ・s -15-8100-10-55Y 方向/m ・s-1-1018-2030-80-10 分析:CV 模型和C A 模型交互滤波的均值误差为16.1338m ,均方误差为0.7918m 。
C V 模型和C A 模型交互滤波的均值误差为16.1338m ,均方误差为0.7918m 。
CV 模型和Singer 模型交互滤波的均值误差为11.0658m,均方误差为0.8873m.C V 模型和“当前”模型交互滤波的均值误差为10.8424m,均方误差为0.8637m 。
可见,在环境2中CV 模型和Singer 模型交互滤波的误差以及C V 模型和“当前”模型交互的误差都比CV 模型和CA 模型交互滤波的误差要小。
以下把CV 和CA 模型交互滤波、CV 和Singer 模型交互滤波、CV 和“当前”模型交互滤波以及Kal m an (Singer 模型)滤波的5条曲线作比较,比较结果如图4和图5所示。
图4 5种模型均值误差比较 图5 5种模型均方误差比较35第7期尹 瑞,等:交互式多模型机动目标跟踪方法的仿真曲线1为滤波前白噪声;曲线2为CV和CA模型交互;曲线3为CV和Singer模型交互;曲线4为CV 和“当前”模型交互;曲线5为Kal m an(Singer)模型。
比较以上各图可以看到,CV模型和C A模型的交互滤波在10~90s内的位置均值误差和均方根误差都比较大,直到90s以后匀速运动时,其位置均值误差和均方根误差才与C V模型和Singer模型的交互滤波、C V 模型和“当前”模型的交互滤波接近。
这是因为C A模型虽然基本上能实现机动目标的跟踪,但是C A模型跟踪机动目标,往往会出现机动跟踪滞后的情况。
用C V模型和Singer模型交互的跟踪精度比C V模型和CA模型交互的跟踪精度要好。
其位置滤波误差均方值比C V模型和CA模型交互跟踪的要小。
C V模型和“当前”模型的交互滤波的精度最好,然而和CV“模型”和Singer模型的交互滤波比较起来,有时前者略好于后者,有时后者略好于前者,有时两者又接近,这是由于交互式多模型所设定的先验模型集造成的[3-4],如果目标运动模型包含在该集合中,则算法的跟踪精度就比较好,反之亦然。
并且,当前模型对目标机动运动的自相关时间常数的先验假设有关,当其假设与目标真实的机动运动自相关时间常数接近时,C V和当前模型交互滤波的跟踪精度较高,反之亦然。
用Kal m an模型(Singer模型)来跟踪,其跟踪精度比CV模型和Singer模型的交互滤波跟踪精度及C V模型和“当前”模型的交互滤波跟踪精度要略低一些,这说明单独用Singer模型也可以完成对机动目标的跟踪,且其实时性比较强,但其跟踪精度略低于交互式多模型。
3 结 语从本文上述CV与CA模型的交互、CV与Singer 模型的交互、CV与“当前”统计模型的交互及单独Kal m an(Singer模型)对机动目标的跟踪性能模拟仿真研究中,可以得出如下结论:(1)Kal m an(Singer模型)跟踪简单、计算方便,实时性强,在目标跟踪滤波中具有一定的意义。