第八章 特征值问题
- 格式:ppt
- 大小:2.29 MB
- 文档页数:66
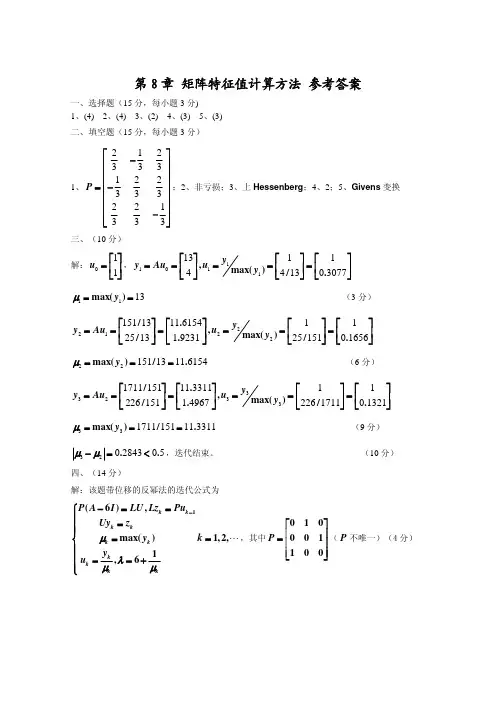
第八章 矩阵的特征值与特征向量的数值解法某些工程计算涉及到矩阵的特征值与特征向量的求解。
如果从原始矩阵出发,先求出特征多项式,再求特征多项式的根,在理论上是无可非议的。
但一般不用这种方法,因为了这种算法往往不稳定。
常用的方法是迭代法或变换法。
本章介绍求解特征值与特征向量的一些方法。
§1 乘幂法乘幂法是通过求矩阵的特征向量来求特征值的一种迭代法,它适用于求矩阵的按模最大的特征值及对应的特征向量。
定理8·1 设矩阵A n ×n 有n 个线性无关的特征向量X i (i=1,2,…,n ),其对应的特征值λi (i =1,2,…,n)满足|λ1|〉|λ2|≧…≧|λn |则对任何n 维非零初始向量Z 0,构造Z k = AZ k —1(k=1,11()lim()k j k k jZ Z λ→∞-= (8·1)其中(Z k )j 表示向量Z k 的第j 个分量。
证明 : 只就λi 是实数的情况证明如下. 因为A 有n 个线性无关的特征向量X i ,(i = 1,2,…,n 可用X i (i = 1,2,…,n)线性表示,即Z 0=α1X 1 + α2X 2 +用A 构造向量序列{Z k }其中 21021010,,k k k Z AZ Z AZ A Z Z AZ A Z -=====, (8.2)由矩阵特征值定义知AX i =λi X i (i=1,2, …,n),故0112211122211121k k k k k n nk k k n n nknki i i i Z A Z A X A X A X X X X X X ααααλαλαλλλααλ===+++=+++⎡⎤⎛⎫⎢⎥=+⎪⎢⎥⎝⎭⎣⎦∑ (8。
3)同理有11111121k nk i k i i i Z X X λλααλ---=⎡⎤⎛⎫⎢⎥=+ ⎪⎢⎥⎝⎭⎣⎦∑ (8.4) 将(8。
3)与(8。
4)所得Z k 及Z k —1的第j 个分量相除,设α1≠0,并且注意到 |λi |<|λ1|(i=1,2,…,n)得11()lim()k j k k jZ Z λ→∞-= 证毕定理8·1的证明过程实际上是给出了矩阵的按模最大特征值的计算方法:1) 先任取一非零向量Z 0,一般可取Z 0=(1,1,1)T ; 2) 按(8.2)式计算Z k =AZ k-1(k=1,2,…); 3) 当K 足够大时,即可求出11()()k j k jZ Z λ-=,为了减少λ1对于所选的第j 个分量的依赖性,还可用各个分量比的平均值来代替,即111()()nk jjk jZ Z nλ=-=∑关于对应于λ1的特征向量的计算:由(8。
第8章特征值问题的计算方法第8章特征值问题的计算方法本章中讨论求n 阶实矩阵的特征值的数值方法。
8.1 基本概念与性质设A 是n 阶方阵,若数λ和非0向量x 满足:x Ax λ=则λ称为A 的特征值,x 称为A 的对应于λ的特征向量。
A 的特征值的全体()A λ称为A 的谱集。
n 次多项式方程()0det =?A I λ称为A 的特征方程,()A I ?λdet 称为A 的特征多项式。
8.2 幂法矩阵的模最大的特征值称为主特征值。
幂法可用于求矩阵的主特征值及其相应的特征向量。
设n 阶方阵A 有有n 个线性无关的特征向量。
设j j j x Ax λ=,j=1..n,其中j λ是A 的特征值,设A 的主特征值1λ是实数且是单重,n λλλ≥≥>L 21.特征向量乘以非0常数仍然是特征向量,故可增加约束,只求范数为1的向量。
设v 0是任意一个非0向量,则v 0可惟一地表示成n 个特征向量的线性组合,设∑==ni i i x v 10α,假设01≠α,令01v A Av v k k k ==?,则111211111~x x x x v k n i i ki i k ni i k i i k αλλλααλλα+==∑∑==,∞→k ,当k>>1时,11?≈k k v v λ,11λ→?k k v v ,1x v v k k →。
为避免计算机出现上溢或下溢现象,在每步计算中将v k 规格化。
111??≈=k k k v Av u λ,k k k m u v =,,k=1,2,…… 则 1x v k →,()()()111111,,,≈=k k k k k k v v v Av v u λ())1111,,≈k k k k v v v u λ若取2kk u m =(k=0,1,2,…),则()11,?≈k k v u λ,简化了运算。
算法8.1功能:用幂法求矩阵主特征值。
形参:阶数n,矩阵A,特征向量v,误差限e,迭代次数上限m ,主特征值L. 条件:计算前v 是初始近似值,非零。
第八章 矩阵特征值问题的数值解法矩阵特征值总是有广泛的应用背景. 例如在科学技术领域中,动力系统和结构系统中的振动问题、电力系统的静态稳定分析上、工程设计中的某些临界值的确定等,都归结为矩阵特征值问题. 本章介绍n 阶实矩阵nn RA ⨯∈的特征值与特征向量的求解方法,即求参数λ和相应的非零向量x ,使Ax=λx ,即(A-λI )x =0,并称λ为A 的特征值,x 为相应于λ的特征向量.而0)(=-x I A λ有非零解的充分必要条件是,0)(det )(111=++++=-=--n n n n a a a I A λλλλλϕ其中),,2,1(n i a i =为常数. 由于上面方程是λ的n 次多项式,因此它有n 个根(实根或复根). 除特殊情况外(如n=2,3或A 为上(下)三角矩阵,一般不直接求解,原因是这样的算法往往不稳定.在计算上常用的方法是乘幂法与反幂法(迭代法)和相似变换方法(变换法). 本章只介绍求矩阵特征值与特征向量的这两种基本方法.第一节 乘幂法及反幂法一、乘幂法 设矩阵nn RA ⨯∈的n 个特征值满足0n 321≥≥≥≥λλλλ (1.1)且有相应的n 个线性无关的特征向量.,,21n x x x 乘幂法是计算矩阵按模最大特征值及相应特征向量的迭代法,其基本思想是对任给的非零向量,0n R z ∈用矩阵A 连续左乘,构造迭代过程,具体过程是: 由假设知∑=≠=ni ii x z 110),0(αα用A 左乘两边得∑∑=====ni i i i ni i i x Ax Az z 1101.λαα再用A 左乘上式,得∑====ni i i x z A Az z 1210212.λα一直这样做下去,一般地有).,2,1( 111111101 =⎥⎥⎦⎤⎢⎢⎣⎡⎪⎪⎭⎫⎝⎛+====∑∑==-k x x x z A Az z n i i ki i kni ik i kk k λλααλλα我们只讨论21λλ>的情况,对其他情况的讨论可根据参考文献[2]参阅有关资料.由(1.2)知,lim111x z kkk αλ=∞→ (1.3)于是对充分大的k 有.111x z kk αλ≈ (1.4)(1.3)表明序列⎭⎬⎫⎩⎨⎧k k z 1λ越来直接近A 的相应于1λ的特征向理(11,0x ≠α是A 的相应于1λ的特征向量的近似向量,其收敛速度取决于比值12λλ. 下面我们来计算1λ. 由于,1111111011⎥⎥⎦⎤⎢⎢⎣⎡⎪⎪⎭⎫ ⎝⎛+===+=+++∑i k in i i k k k k x x z A Az z λλααλ当k 充分大时, 11111x z k k αλ++≈,于是可知。
第八章矩阵特征值8.1特征值的定义在线性代数中,一个n阶方阵A的特征值(Eigenvalue)是指一个标量λ,使得下面的等式成立:Ax=λx其中x是一个非零的n维向量,被称为对应于特征值λ的特征向量(Eigenvector)。
特别地,一些情况下,我们有:AX=λX。
这是一个常见的特殊情况,被称为多重特征值(Multiple Eigenvalues)。
8.2特征值与特征向量的求解我们可以通过以下方式求解矩阵的特征值与特征向量。
1.设A是一个n阶方阵,特征值为λ,特征向量为X,我们有AX=λX。
2.将等式重写为AX–λX=0,再移项得到(A–λI)x=0。
3.构造(A–λI)矩阵,其中I是单位矩阵。
4.解方程组(A–λI)X=0,求解零空间的基础解系(基础特征向量)。
5.基础特征向量的线性组合即为所有特征向量。
8.3特征值的性质矩阵的特征值具有一些性质,包括:1.特征值的个数等于矩阵的阶数。
一个n阶矩阵A最多有n个不同的特征值。
2.特征值的乘积等于矩阵的行列式。
即特征值λ1,λ2,…,λn与矩阵A的特征多项式p(λ)=,A-λI,的系数关系为λ^n+a_{n-1}λ^(n-1)+…+a_1λ+a_0。
3.特征值的和等于矩阵的迹。
即矩阵A的特征值λ1,λ2,…,λn 满足λ1+λ2+…+λn=Tr(A),其中Tr(A)为矩阵A的迹(对角线上元素之和)。
4.特征值与行列式的关系。
矩阵A的特征值λ1,λ2,…,λn都满足,A-λI,=0,即他们是矩阵A的特征方程的根。
8.4矩阵的对角化对角化是指将一个矩阵通过相似变换,将其转化为对角矩阵的过程。
对角化的主要目的是将矩阵的运算简化为对角矩阵的运算,从而更易于求解。
一个n阶方阵可以对角化的条件是它有n个线性无关的特征向量,即A的特征向量数量等于A的阶数。
通过对角化,可以将矩阵A表示为:A=P^(-1)DP其中D是对角矩阵,P是可逆矩阵,P的列向量是A的特征向量。