自动控制原理胡寿松第六版
- 格式:ppt
- 大小:1.23 MB
- 文档页数:36


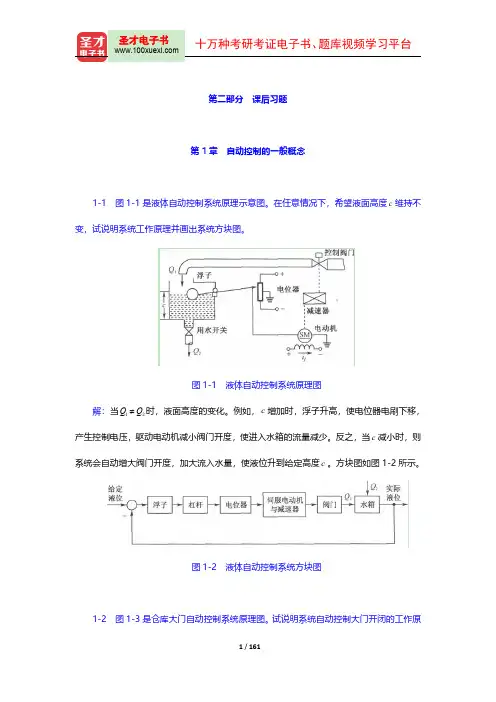
第二部分课后习题第1章自动控制的一般概念1-1图1-1是液体自动控制系统原理示意图。
在任意情况下,希望液面高度c 维持不变,试说明系统工作原理并画出系统方块图。
图1-1液体自动控制系统原理图解:当12Q Q 时,液面高度的变化。
例如,c 增加时,浮子升高,使电位器电刷下移,产生控制电压,驱动电动机减小阀门开度,使进入水箱的流量减少。
反之,当c 减小时,则系统会自动增大阀门开度,加大流入水量,使液位升到给定高度c 。
方块图如图1-2所示。
图1-2液体自动控制系统方块图1-2图1-3是仓库大门自动控制系统原理图。
试说明系统自动控制大门开闭的工作原理并画出系统方块图。
图1-3仓库大门自动控制系统原理图解:当合上开门开关时,产生偏差电压信号,信号被放大后,驱动伺服电动机转动,使大门向上提起。
同时,电位器电刷上移,测量电路重新达到平衡,电动机停止转动。
反之,当合上关门开关时,伺服电动机反向转动,带动绞盘转动使大门关闭。
方块图如图1-4所示。
图1-4仓库大门自动控制系统方块图1-3图1-5(a)和(b)均为自动调压系统。
设空载时,图(a)和图(b)的发电机端电压均为110V。
试问带上负载后,图(a)和图(b)中哪个系统能保持110V电压不变?哪个系统的电压会稍低于110V?为什么?图1-5自动调压系统解:图1-5(a)所示系统能够恢复到110V,图1-5(b)所示系统的端电压将稍低于110V,原因如下:图1-5(a)所示系统,当端电压低于给定电压时,其偏差电压经放大器放大使伺服电机SM转动,从而偏差电压减小至零,伺服电机停止转动,因此,图1-5(a)所示系统能够恢复到110V。
图1-5(b)所示系统,当偏差电压为零时,激磁电流也为零,发电机不能工作,因此,图1-5(b)所示系统的端电压将稍低于110V。
1-4图1-6为水温控制系统原理示意图。
冷水在热交换器中由通入的蒸汽加热,从而得到一定温度的热水。
冷水流量变化用流量计测量。



第六版前言第一章自动控制的一般概念1-1 自动控制的基本原理与方式1-2 自动控制系统示例1-3 自动控制系统的分类1-4 对自动控制系统的基本要求1-5 自动控制系统的分析与设计工具习题第二章控制系统的数学模型2-1 控制系统的时域数学模型2-2 控制系统的复数域数学模型2-3 控制系统的结构图与信号流图2-4 控制系统建模实例习题第三章线性系统的时域分析法3-1 系统时间响应的性能指标3-2 一阶系统的时域分析3-3 二阶系统的时域分析3-4 高阶系统的时域分析3-5 线性系统的稳定性分析3-6 线性系统的稳态误差计算3-7 控制系统时域设计习题第四章线性系统的根轨迹法4-1 根轨迹法的基本概念4-2 根轨迹绘制的基本法则4-3 广义根轨迹4-4 系统性能的分析4-5 控制系统复域设计习题第五章线性系统的频域分析法5-1 频率特性5-2 典型环节与开环系统的频率特性5-3 频率域稳定判据5-4 稳定裕度5-5 闭环系统的频域性能指标5-6 控制系统频域设计习题第六章线性系统的校正方法6-1 系统的设计与校正问题6-2 常用校正装置及其特性6-3 串联校正6-4 前馈校正6-5 复合校正6-6 控制系统校正设计习题第七章线性离散系统的分析与校正7-1 离散系统的基本概念7-2 信号的采样与保持7-3 z变换理论7-4 离散系统的数学模型7-5 离散系统的稳定性与稳态误差7-6 离散系统的动态性能分析7-7 离散系统的数字校正7-8 离散控制系统设计习题第八章非线性控制系统分析8-1 非线性控制系统概述8-2 常见非线性特性及其对系统运动的影响8-3 相平面法8-4 描述函数法8-5 非线性控制的逆系统方法8-6 非线性控制系统设计习题第九章线性系统的状态空间分析与综合9-1 线性系统的状态空间描述9-2 线性系统的可控性与可观测性9-3 线性定常系统的反馈结构及状态观测器9-4 李雅普诺夫稳定性分析9-5 控制系统状态空间设计习题第十章动态系统的最优控制方法10-1 最优控制的一般概念10-2 最优控制中的变分法10-3 极小值原理及其应用10-4 线性二次型问题的最优控制10-5 控制系统优化设计。