确定有限自动机的化简
- 格式:ppt
- 大小:53.00 KB
- 文档页数:11
有限状态自动机的确定化姓名:翟彦清学号:E10914127一、实验目的设计并实现将 NFA确定化为DFA的子集构造算法,从而更好地理解有限自动机之间的等价性,掌握词法分析器自动产生器的构造技术。
该算法也是构造LR分析器的基础。
输入:非确定有限(穷)状态自动机。
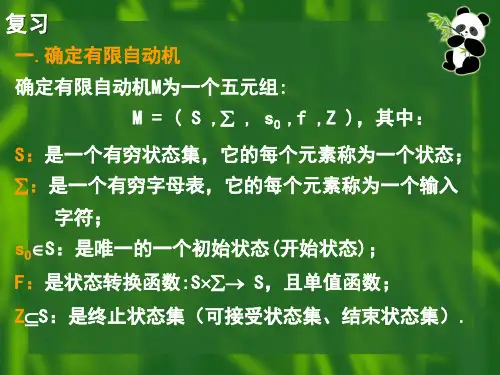
输出:确定化的有限(穷)状态自动机二、实验原理一个确定的有限自动机(DFA M可以定义为一个五元组,M k( K,E, F, S, Z),其中:(1)K是一个有穷非空集,集合中的每个元素称为一个状态;(2)刀是一个有穷字母表,刀中的每个元素称为一个输入符号;(3)F是一个从K XE^ K的单值转换函数,即 F (R, a)= Q ( R, Q€ K)表示当前状态为R,如果输入字符 a,则转到状态 Q,状态Q称为状态R的后继状态;(4)S€ K,是惟一的初态;(5)Z K,是一个终态集。
由定义可见,确定有限自动机只有惟一的一个初态,但可以有多个终态,每个状态对字母表中的任一输入符号,最多只有一个后继状态。
对于DFAM,若存在一条从某个初态结点到某一个终态结点的通路,则称这条通路上的所有弧的标记符连接形成的字符串可为DFAM所接受。
若M的初态结点同时又是终态结点,则称&可为 M所接受(或识别),DFA M所能接受的全部字符串(字)组成的集合记作 L(M)。
一个不确定有限自动机(NFA M可以定义为一个五元组,M=(K, E, F, S, Z), 其中:( 1) k 是一个有穷非空集,集合中的每个元素称为一个状态;(2)E是一个有穷字母表,E中的每个元素称为一个输入符号;(3)F是一个从K xE^ K的子集的转换函数;(4)S K,是一个非空的初态集;(5)Z K,是一个终态集。
由定义可见,不确定有限自动机 NFA与确定有限自动机DFA的主要区别是:(1)NFA的初始状态S为一个状态集,即允许有多个初始状态;(2)NFA中允许状态在某输出边上有相同的符号,即对同一个输入符号可以有多个后继状态。
编译原理词法NFADFA的确定化和化简编译原理中的词法分析主要包括以下步骤:词法分析器将输入的源程序文本转化为一个个单词(token),即词法单元。
在词法分析过程中,使用的主要工具是有限自动机(NFA)和确定的有限自动机(DFA)。
NFA(DFA)的确定化是指将一个非确定的有限自动机转化为一个确定的有限自动机。
非确定有限自动机具有多个可能的转换路径,而确定有限自动机每个状态只能有一个转换路径。
确定化的目的是简化自动机的状态图,减少转换的复杂性,便于理解和实现。
确定化的过程一般包括以下步骤:1)初始化:将NFA的起始状态作为DFA的起始状态,并为其创建一个新的DFA状态。
2)闭包运算:对于DFA中的每个状态,根据NFA的ε-转换,计算其ε-闭包(即能够通过ε-转换到达的状态集合)。
3)转换运算:对于DFA中的每个状态和每个输入符号,根据NFA的转换函数,计算DFA中该输入下的状态转移集合。
4)如果新生成的DFA状态集合不在已有的DFA状态集合中,则将其加入到DFA状态集合中,并进行闭包和转换运算;如果已存在,则继续下一个输入符号的转换运算。
5)重复步骤4,直到不再生成新的DFA状态集合。
化简是指对于一个确定的有限自动机(DFA),将其中无用的状态进行合并,得到一个更加简洁的自动机。
化简的目的是减少状态数目,提高运行效率和存储效率。
化简的过程一般包括以下步骤:1)初始化:将DFA状态分为两个集合,一个是终止状态集合,一个是非终止状态集合。
2)将所有的等价状态划分到同一个等价类中。
3)不断迭代以下步骤,直到不能再划分等价类为止:a)对于每对不同的状态p和q,若存在一个输入符号a,通过转移函数计算得到的状态分别位于不同的等价类中,则将该状态划分到不同的等价类中。
b)对于每个等价类中的状态集合,将其进一步划分为更小的等价类。
最终,得到的化简DFA状态图比原始DFA状态图要小,且功能等价。

DFA(确定的有穷自动机)的化简1. 实验内容输入一个DFA M,输出一个与之等价的最小化的DFA M’,设计并实现将NFA确定化为DFA的子集构造算法,输入非确定有限(穷)状态自动机,输出确定化的有限(穷)状态自动机编写一个程序,将一个非确定有限自动机转换为确定有限自动机。
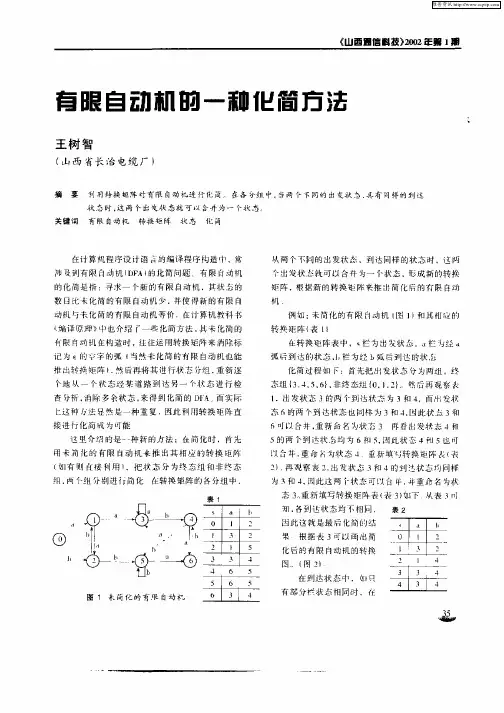
2. 实验设计分析2.1 实验设计思路首先输入边集找到状态与边的关系,然后输入终结点,这样一个没有简化的NFA图就表示出来了,然后利用求闭包的方式求move集合,画出状态转化图,重命名后进行集合划分,再次重新画出状态转换矩阵,输出简化后的DFA。
2.2 实验算法(1)构造具有两个组的状态集合的初始划分I:接受状态组 F 和非接受状态组Non-F。
(2)对I采用下面所述的过程来构造新的划分I-new.For I 中每个组G doBegin当且仅当对任意输入符号a,状态s和读入a后转换到I的同一组中;/*最坏情况下,一个状态就可能成为一个组*/用所有新形成的小组集代替I-new中的G;end(3)如果I-new=I,令I-final=I,再执行第(4)步,否则令I=I=new,重复步骤(2)。
(4)在划分I-final的每个状态组中选一个状态作为该组的代表。
这些代表构成了化简后的DFA M'状态。
令s是一个代表状态,而且假设:在DFA M 中,输入为a时有从s到t转换。
令t所在组的代表是r,那么在M’中有一个从s到r的转换,标记为a。
令包含s0的状态组的代表是M’的开始状态,并令M’的接受状态是那些属于F的状态所在组的代表。
注意,I-final的每个组或者仅含F中的状态,或者不含F中的状态。
(5)如果M’含有死状态(即一个对所有输入符号都有刀自身的转换的非接受状态d),则从M’中去掉它;删除从开始状态不可到达的状态;取消从任何其他状态到死状态的转换。
2.3 实验流程1. 输入NFA各边信息(起点条件[空为*] 终点),以#结束2. 输入终态3. 求e-clouse闭包,将结点移入相应的闭包集合,并重新排序4. 输出状态转换矩阵,转换成DFA并重命名5. 执行DFA最简化6. 重命名DFA,输出最简化DFA状态转换矩阵2.4 实验的基本技术设计方案实验中含有一些数据结构的知识,假设I是NFA M状态集K的一个子集(即I∈K),则定义ε-closure(I)为:若Q∈I,则Q∈ε-closure(I);若Q∈I,则从Q出发经过任意条ε弧而能到达的任何状态Q’,则Q’∈ε-closure(I)。
DFA(确定的有穷自动机)的化简1. 实验内容输入一个DFA M,输出一个与之等价的最小化的DFA M’,设计并实现将NFA确定化为DFA的子集构造算法,输入非确定有限(穷)状态自动机,输出确定化的有限(穷)状态自动机编写一个程序,将一个非确定有限自动机转换为确定有限自动机。
2. 实验设计分析2.1 实验设计思路首先输入边集找到状态与边的关系,然后输入终结点,这样一个没有简化的NFA图就表示出来了,然后利用求闭包的方式求move集合,画出状态转化图,重命名后进行集合划分,再次重新画出状态转换矩阵,输出简化后的DFA。
2.2 实验算法(1)构造具有两个组的状态集合的初始划分I:接受状态组 F 和非接受状态组Non-F。
(2)对I采用下面所述的过程来构造新的划分I-new.For I 中每个组G doBegin当且仅当对任意输入符号a,状态s和读入a后转换到I的同一组中;/*最坏情况下,一个状态就可能成为一个组*/用所有新形成的小组集代替I-new中的G;end(3)如果I-new=I,令I-final=I,再执行第(4)步,否则令I=I=new,重复步骤(2)。
(4)在划分I-final的每个状态组中选一个状态作为该组的代表。
这些代表构成了化简后的DFA M'状态。
令s是一个代表状态,而且假设:在DFA M 中,输入为a时有从s到t转换。
令t所在组的代表是r,那么在M’中有一个从s到r的转换,标记为a。
令包含s0的状态组的代表是M’的开始状态,并令M’的接受状态是那些属于F的状态所在组的代表。
注意,I-final的每个组或者仅含F中的状态,或者不含F中的状态。
(5)如果M’含有死状态(即一个对所有输入符号都有刀自身的转换的非接受状态d),则从M’中去掉它;删除从开始状态不可到达的状态;取消从任何其他状态到死状态的转换。
2.3 实验流程1. 输入NFA各边信息(起点条件[空为*] 终点),以#结束2. 输入终态3. 求e-clouse闭包,将结点移入相应的闭包集合,并重新排序4. 输出状态转换矩阵,转换成DFA并重命名5. 执行DFA最简化6. 重命名DFA,输出最简化DFA状态转换矩阵2.4 实验的基本技术设计方案实验中含有一些数据结构的知识,假设I是NFA M状态集K的一个子集(即I∈K),则定义ε-closure(I)为:若Q∈I,则Q∈ε-closure(I);若Q∈I,则从Q出发经过任意条ε弧而能到达的任何状态Q’,则Q’∈ε-closure(I)。
有限状态机设计与化简
在设计和实现有限状态机时,我们经常遇到的一个问题是状态机可能会变得复杂和冗长,导致难以管理和维护。
因此,我们需要一个方法来对有限状态机进行化简,以简化设计和提高可读性。
1.确定状态集合:首先,我们需要明确系统中可能的所有状态。
这些状态应该能够完整地描述系统的行为和状态。
2.确定输入符号集合:然后,我们需要确定能够影响状态转移的所有输入符号。
3.确定输出符号集合:接下来,我们需要确定状态机可以产生的所有输出符号。
4.确定转移函数:转移函数定义了从一个状态到另一个状态的转移条件。
我们需要根据系统要求确定转移函数的具体形式和条件。
5.绘制状态转移图:借助状态转移图,我们可以直观地表示状态之间的转移关系。
图中的节点表示状态,边表示状态之间的转移,边上的标记表示触发该转移的输入符号。
6.确定等价状态:等价状态是指在任何输入序列下,状态机的行为是相同的。
我们可以使用不同的方法(如等价关系、状态等价识别算法等)来确定等价状态。
7.合并等价状态:一旦我们确定了等价状态,我们可以将它们合并成一个新的等价状态。
通过合并等价状态,我们可以显著减少状态机的复杂性和冗余。
8.重绘状态转移图:最后,我们需要使用新的等价状态更新状态转移图。
新的状态转移图应该更简洁和易读,同时保留了原始状态机的行为。
通过以上步骤,我们可以对有限状态机进行设计和化简,从而简化复杂的状态机,并提高其可读性和可维护性。
这对于开发和设计各种自动控制系统、软件系统和电路系统等具有重要意义。
有限状态自动机的确定化姓名:翟彦清学号:E10914127一、实验目的设计并实现将NFA确定化为DFA的子集构造算法,从而更好地理解有限自动机之间的等价性,掌握词法分析器自动产生器的构造技术。
该算法也是构造LR分析器的基础。
输入:非确定有限(穷)状态自动机。
输出:确定化的有限(穷)状态自动机二、实验原理一个确定的有限自动机(DFA)M可以定义为一个五元组,M=(K,∑,F,S,Z),其中:(1)K是一个有穷非空集,集合中的每个元素称为一个状态;(2)∑是一个有穷字母表,∑中的每个元素称为一个输入符号;(3)F是一个从K×∑→K的单值转换函数,即F(R,a)=Q,(R,Q∈K)表示当前状态为R,如果输入字符a,则转到状态Q,状态Q称为状态R的后继状态;(4)S∈K,是惟一的初态;(5)Z⊆K,是一个终态集。
由定义可见,确定有限自动机只有惟一的一个初态,但可以有多个终态,每个状态对字母表中的任一输入符号,最多只有一个后继状态。
对于DFA M,若存在一条从某个初态结点到某一个终态结点的通路,则称这条通路上的所有弧的标记符连接形成的字符串可为DFA M所接受。
若M的初态结点同时又是终态结点,则称ε可为M所接受(或识别),DFA M所能接受的全部字符串(字)组成的集合记作L(M)。
一个不确定有限自动机(NFA)M可以定义为一个五元组,M=(K,∑,F,S,Z),其中:(1)k是一个有穷非空集,集合中的每个元素称为一个状态;(2)∑是一个有穷字母表,∑中的每个元素称为一个输入符号;(3)F是一个从K×∑→K的子集的转换函数;(4)S⊆K,是一个非空的初态集;(5)Z⊆K,是一个终态集。
由定义可见,不确定有限自动机NFA与确定有限自动机DFA的主要区别是:(1)NFA的初始状态S为一个状态集,即允许有多个初始状态;(2)NFA中允许状态在某输出边上有相同的符号,即对同一个输入符号可以有多个后继状态。