基于新型转子磁链观测器的异步电机转矩闭环矢量控制_杨淑英
- 格式:pdf
- 大小:784.86 KB
- 文档页数:9

摘要目前广泛研究应用的异步电机调速技术有恒压频比控制方式、矢量控制、直接转矩控制等。
本论文中所讨论的是异步电机矢量控制调速法,相对于恒压频比控制和直接转矩控制,它有优秀的动态性能和低速性能,还有其调速范围宽的优点。
在给出异步电动机的矢量控制原理的同时,一并给出了矢量变换实现的步骤,解释了三相异步电动机数学模型的解耦方法。
在论述了三相异步电功机的磁场定向原理之后,又介绍了转子磁链计算方法并设计了转子磁链观测器。
详细分析了转矩调节器,转速调节器和磁通调节器的工作原理,并根据各个调节器的原理对各个调节器进行了相应的设计。
以DSP为控制核心,设计了异步电机矢量控制系统的硬件电路。
关键词:异步电机矢量控制 DSP处理器1 概述1.1 系统设计的主要任务要求异步电机矢量控制系统设计是基于三相异步电机的交流调速技术的研究[1][2][3],本设计的主要任务有:(1)研究矢量控制系统的原理[4]。
(2)研究矢量控制系统的实现方法。
(3)分析矢量控制系统特点及软硬件接口。
(4)设计矢量控制系统硬件电路(5)设计矢量控制系统的软件流程。
(6)对矢量控制的数学模型进行仿真分析[5]。
1.2 国内外研究现状矢量控制理论是由美国和德国的科学家在二十世纪七十年分别提出的理论[5][6],经过半个世纪的补充和完善,使得矢量控制技术在工农业各种生产应用中逐渐突出[7][8]。
交流电机矢量控制技术就是建立电机可靠的数学模型,把定子电流矢量分解为转矩电流矢量和励磁电流矢量,分别控制其方向和大小,使其合成变频器的可控有效信号[9]。
此技术是建立在直流调速系统深入研究基础上的仿直流调速系统,它实现了交流电机的直流化控制,进而极大地提高了交流调速系统的高效性、稳定性和易操作性。
异步电机矢量控制系统的基本思想是通过对变频器参数的控制信号的分析控制,实现对电磁转矩的有效控制,使得异步电机调速系统获得和直流调速系统相似的控制方法及控制效果。
具体原理如下:首先将电流的坐标变换,将定子上的三相对称电流A i、B i、C i通过坐标变换到同步旋转坐标系d-q 坐标系下两相直流电流(同步旋转坐标系下,始终保持d-q坐标系中d轴与转子磁场方向一致),即通过数学变换将三相交流电机的电子电流分解为两个分量:产生旋转磁动势的励磁分量M i和产生电磁转矩分量r i,然后以控制电流电机的方式分别对磁场和转矩进行单独控制,再经过变换方式把控制的结果转换成随时间变化的瞬间变量,所以系统控制频率特性好、控制精度高、转矩动态响应速度快。
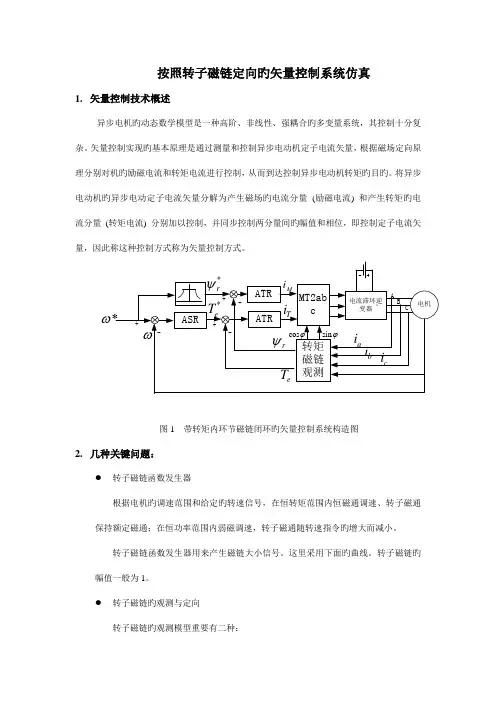
按照转子磁链定向旳矢量控制系统仿真1.矢量控制技术概述异步电机旳动态数学模型是一种高阶、非线性、强耦合旳多变量系统,其控制十分复杂。
矢量控制实现旳基本原理是通过测量和控制异步电动机定子电流矢量,根据磁场定向原理分别对机旳励磁电流和转矩电流进行控制,从而到达控制异步电动机转矩旳目旳。
将异步电动机旳异步电动定子电流矢量分解为产生磁场旳电流分量(励磁电流) 和产生转矩旳电流分量(转矩电流) 分别加以控制,并同步控制两分量间旳幅值和相位,即控制定子电流矢量,因此称这种控制方式称为矢量控制方式。
ω图1 带转矩内环节磁链闭环旳矢量控制系统构造图2.几种关键问题:●转子磁链函数发生器根据电机旳调速范围和给定旳转速信号,在恒转矩范围内恒磁通调速、转子磁通保持额定磁通;在恒功率范围内弱磁调速,转子磁通随转速指令旳增大而减小。
转子磁链函数发生器用来产生磁链大小信号。
这里采用下面旳曲线。
转子磁链旳幅值一般为1。
●转子磁链旳观测与定向转子磁链旳观测模型重要有二种:(1) 在两相静止坐标系上旳转子磁链模型电机旳定子电压和电流由传感器测得后,通过3S/2S 变换,再根据异步电机在两项静止坐标系下旳数学模型,计算转子磁链旳大小。
()r αm s αr r βr 11L i T T p ψωψ=-+ ()r βm s βr r αr 11L i T T p ψωψ=++ (2) 按磁场定向两相旋转坐标系上旳转子磁链模型三相定子电流 iA 、 iB 、iC 经3/2变换变成两相静止坐标系电流 is α 、 is β ,再经同步旋转变换并按转子磁链定向,得到M ,T 坐标系上旳电流 ism 、ist ,运用矢量控制方程式m st1s r rL i T ωωωψ-==mr smr 1L i T p ψ=+可以获得 ψr 和 ωs 信号,由ωs 与实测转速 ω 相加得到定子频率信号ω1,再经积分即为转子磁链旳相位角ϕ ,它也就是同步旋转变换旳旋转相位角。
1 引言1.1交流调速技术的发展和现状在工农业生产、科技、国防及日常生活等各个领域,电动机作为主要的动力设备被广泛应用。
直流电动机相比于交流电动机,结构复杂、体积大、成本和维护费用高,并且不适于环境恶劣的场合,但凭借控制简单、调速平滑和性能良好等特点在早期电气传动领域中一直占据主导地位[1]。
从20世纪30年代开始,人们就致力于交流调速技术的研究。
特别是20世纪60年代以后,电力电子技术和控制技术的飞速发展,使得交流调速性能得到很大的提高,在实际应用领域也得到认可和快速的普及。
交流调速的发展可以说是硬件和软体的发展过程[3]。
随着电力电子技术、微处理器技术和自动化控制技术的不断完善和发展,使得交流调速系统的调速范围宽、速度精度高和动态响应快,其技术性能可与直流调速系统相媲美、相竞争,并在工程应用领域中逐渐取代直流调速系统[5]。
交流电动机的高效调速方法是变频调速,它不但能实现无级调速,而且根据负载的特性不同,通过适当调节电压和频率之间的关系,可使电机始终高效运行,并保证良好的动态特性,更能降低起动电流、增加起动转矩和改善电机的起动性能。
交流调速控制理论的发展经历了电压-频率控制、矢量控制、直接转矩控制,控制理论的发展使控制系统性能不断提高[2]。
电压-频率协调控制,即恒压频比控制,是指在基频以下调速时维持输出电压幅值和频率的比值恒定,实现恒转矩调速运行;在基频以上调速时,将输出电压维持在额定值,使磁通与频率成反比下降,实现弱磁恒功率调速运行。
其控制系统结构简单,成本低,能满足一般的平滑调速,但动、静态性能有限,适用于风机、水泵等负载对调速系统动态性能要求不高的场合[8]。
矢量控制就是将磁链与转矩解耦,有利于分别设计两者的调节器,以实现对交流电机的高性能调速。
矢量控制方式又有基于转差频率控制的矢量控制方式、无速度传感器的矢量控制方式和有速度传感器的矢量控制方式等[12]。
这样就可以将一台三相异步电机等效为直流电机来控制,因而获得与直流调速系统同样的静、动态性能。
基于改进混合模型转子磁链观测器的异步电机无速度传感器控制郭磊磊;靳雪妍;朱虹;李琰琰;王帅;金楠【期刊名称】《电力系统保护与控制》【年(卷),期】2024(52)8【摘要】针对异步电机无速度传感器控制由于估计转子磁链不准确导致控制精度不佳的问题,提出了一种改进的混合模型转子磁链观测器设计方法。
首先,介绍了常规的异步电机磁链观测方法,并借助异步电机的复矢量模型和特征函数详细分析了常规Gopinath型转子磁链观测器存在的主要问题。
其次,为了解决常规磁链观测器存在的缺点,提出了一种改进的特征函数设计方法,进而得到了一种改进的混合模型转子磁链观测器。
再次,基于特征函数和频率响应函数,进一步对比研究了常规Gopinath型转子磁链观测器和所提改进的混合模型转子磁链观测器的参数灵敏性。
最后,利用所提混合模型转子磁链观测器的磁链观测结果和锁相环,实现了异步电机的无速度传感器控制。
基于StarSim和YXSPACE-SP2000平台的对比实验结果,验证了所提混合模型转子磁链观测器的参数鲁棒性,同时也验证了所提无速度传感器控制策略的有效性。
【总页数】10页(P178-187)【作者】郭磊磊;靳雪妍;朱虹;李琰琰;王帅;金楠【作者单位】郑州轻工业大学电气信息工程学院;中国能源建设集团安徽省电力设计院有限公司【正文语种】中文【中图分类】TP2【相关文献】1.异步电机无速度传感器控制的Holtz型磁链观测器性能分析2.基于全阶磁链观测器的异步电机无速度传感器矢量控制系统3.无速度传感器感应电机改进转子磁链观测器4.基于改进型转子磁链观测器的异步电机速度控制研究5.基于改进型磁链观测器的TSMC-PMSM无速度传感器矢量控制系统研究因版权原因,仅展示原文概要,查看原文内容请购买。