3.3 线性时变连续系统状态方程的解
- 格式:pdf
- 大小:451.58 KB
- 文档页数:31
连续系统的状态方程是什么
连续系统的状态方程描述了系统的动态行为,通常以微分方程形式表示。
对于线性时间不变系统,连续系统的状态方程可以用以下一阶常微分方程表示:
dx(t)/dt = A * x(t) + B * u(t)
其中:
- x(t) 是系统的状态向量,它包含了描述系统状态的变量。
每个变量代表系统的一个状态,如位置、速度、温度等。
- t 是时间变量,表示系统运行的时间。
- dx(t)/dt 是状态向量x(t) 关于时间t 的导数,表示状态的变化率。
- A 是系统的状态矩阵,描述了状态变量之间的关系和状态变化的规律。
- B 是输入矩阵,描述了外部输入u(t) 对系统状态的影响。
上述方程表示了状态向量x(t) 随时间t 的变化情况。
右侧第一项A * x(t) 表示系统自身状态对状态变量的影响,而右侧第二项B * u(t) 表示外部输入u(t) 对状态变量的影响。
需要注意的是,上述方程是线性时间不变系统的状态方程。
对于非线性或时变系统,状态方程的形式可能更加复杂,可能包含更高阶的微分项或非线性函数。
![[东北大学][现代控制理论][03][状态方程的解]PPT课件](https://uimg.taocdn.com/74f1d74d6edb6f1afe001f27.webp)
求状态方程的时域解状态方程(State Equation)是描述动态系统的数学模型,它能够描述系统的状态如何随时间变化。
在控制论中,求解状态方程的时域解在设计和分析控制系统中具有重要意义。
本文将介绍状态方程的定义、求解方法以及时域解的计算过程。
状态方程的定义状态方程是用微分方程的形式表示的动态系统。
一般形式的状态方程可以表示为:dx(t)/dt = A(t) * x(t) + B(t) * u(t)其中,x(t)是状态向量,表示系统在时间t的状态,u(t)是输入向量,表示在时间t的输入,A(t)和B(t)是矩阵,它们表示系统的动态特性。
该方程描述了系统状态的变化率以及输入对状态的影响。
解法求解状态方程的时域解需要通过求解微分方程来获取。
具体的解法主要有两种:利用拉普拉斯变换求解和利用差分方程求解。
1. 利用拉普拉斯变换求解在连续时间域中,可以利用拉普拉斯变换来求解状态方程的时域解。
具体步骤如下:1.将状态方程中的微分方程用拉普拉斯变换转换为代数方程。
2.根据已知的初始条件,建立方程的初始条件。
3.根据所求解的变量进行移项整理,求解出未知变量的表达式。
4.对拉普拉斯域变换的结果进行逆变换,得到时域解。
2. 利用差分方程求解在离散时间域中,可以利用差分方程来求解状态方程的时域解。
具体步骤如下:1.将状态方程中的微分方程用差分方程转换为代数方程。
2.根据已知的初始条件,建立方程的初始条件。
3.根据差分方程的表达形式,利用递推关系计算出未知变量的取值。
4.得到差分方程的解,并将其转换为时域解。
时域解的计算过程下面将以连续时间域为例,介绍求解状态方程的时域解的计算过程。
1. 利用拉普拉斯变换求解假设我们有一个一阶线性连续时间不变系统,状态方程为:dx(t)/dt = A * x(t) + B * u(t)其中x(t)是一个列向量,u(t)是输入的标量,A和B是常数矩阵。
首先,我们将方程两边进行拉普拉斯变换,得到:sX(s) - x(0) = A * X(s) + B * U(s)其中X(s)和U(s)是x(t)和u(t)的拉普拉斯变换,s是拉普拉斯变换的复变量。
第一章测试1.系统前向通道传递函数阵为,反馈通道传递函数阵为,则系统闭环传递函数为()。
A:B:C:D:答案:B2.下面关于线性时不变系统的系统矩阵说法错误的是()。
A:由系统矩阵可以得到系统的运动模态。
B:具有相同特征值的系统矩阵,鲁棒稳定性是一样的。
C:系统矩阵的形式决定着系统的稳定性质。
D:系统矩阵不同,系统特征值可能相同。
答案:B3.下面关于状态空间模型描述正确的是()。
A:对一个系统,只能选取一组状态变量。
B:模型的阶数就是系统中含有储能元件的个数。
C:代数等价的状态空间模型具有相同的特征多项式和稳定性。
D:对于线性定常系统的状态空间模型,经常数矩阵非奇异变换后的模型,其传递函数阵是的零点是有差别的。
答案:C4.线性变换不改变系统的()A:状态变量B:特征值C:状态方程D:传递函数答案:BD5.对于同一控制系统,只能选取一组状态变量。
()A:对B:错答案:B第二章测试1.非齐次状态方程的解包含零状态响应和零输入响应两部分。
()A:对B:错答案:A2.系统的状态方程为齐次方程,若初始时刻为0,,则其解为()。
A:B:D:答案:A3.下面关于线性连续系统的状态转移矩阵描述错误的是()。
A:状态转移矩阵不唯一B:C:D:答案:A4.已知线性连续系统的状态空间表达式为,对该系统进行离散化为状态空间表达式为,其中采样周期为T,那么下列正确的是()A:H=BB:G=AC:C=CD:D=D答案:CD5.对于线性定常系统,若系统矩阵A为,则系统的状态转移矩阵为()。
A:B:1C:D:答案:C第三章测试1.下面关于连续线性系统的能观性说法错误的是()。
A:常数非奇异变换不改变系统的能观性。
B:能观性表征了输出反映内部状态的能力。
C:一个系统不能观,意味着存在满足D:系统状态若不完全能观,则一定可以将状态分成完全能观子空间和不完全能观的子空间,这两个子空间完全正交。
答案:C2.下面关于连续线性系统的能控性说法正确的是()。
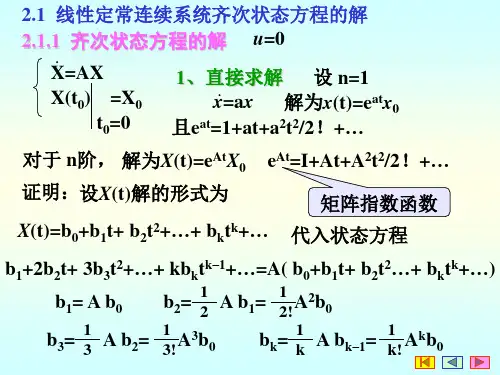
Chapter2状态方程的解我们要解决的问题是:在系统初始时刻0t t =时,初始状态为00)(x t x =的条件下,对该系统施加控制)(t u ,求出系统状态)(t x 的变化,即求解非齐次方程(0)(≠t u )初值问题的解:000)()()()()()(t t x t x t u t B t x t A t x≥=+=或者在系统不加控制)(t u ,(0)(=t u 称为自由系统)的条件下,求出初值)(0t x 对系统状态)(t x 的影响,即求解齐次方程初值问题的解:000)(),()()(t t x t x t x t A t x≥==⇒⎩⎨⎧离散连续线性定常⇒⎩⎨⎧离散连续线性时变⎩⎨⎧⨯∆⇒⎩⎨⎧⨯∆数值解解析解非齐次数值解解析解齐次 2.1 线性定常系统状态方程的解2.1.1n 阶、线性、定常(无关与时间t A )连续系统齐次状态方程的解我们知道:常系数线性微分方程(标量方程))()(t ax t x= ,0)0(x x =,0≥t 其解为 000!)(x k t a x e t x k kk at∑∞===对齐次状态方程(矩阵方程))()(t Ax t x= ,0)0(x x =,0≥t 很自然,仿照常系数线性微分方程,可得到n 阶线性、定常、连续系统齐次(0)(=t u )状态方程的解000!)(x k t A x e t x k kk At∑∞=== 定义矩阵指数:k k k k k Att A k t A At I k t A e!121!220++++=≡∑∞= ,它仍是一个矩阵。
若初始时间为0t ,则状态方程的解为0000)(!)()(0x k t t A x et x k kk t t A ∑∞=--==∑∞=--=00)(!)(0k kk t t A k t t A e称为定常(连续)系统的状态转移矩阵。
)(0t t A e -物理意义:将系统从初始状态)(0t x 转移到(时刻t 的)状态)(t x 。
状态变量分析法的优点:1. 便于观察系统内部某些物理量的变化过程;2. 与系统的复杂程度无关,复杂系统和简单系统的数学模型相似,适于多输入多输出系统;3. 适于研究非线性或时变系统。
因为一阶微分方程或差分方程是研究非线性和时变系统的有效方法。
4. 便于研究系统的稳定性、可控性、可观测性及系统内部参数变化对系统特性的影响;5. 状态方程都是一阶微分方程或差分方程,便于采用数值解法在计算机上实现系统分析。
系数矩阵由系统的参数决定,非时变系统为常数,时变系统为时间的函数。
,A B 四、输出方程(output equation))(,),(),(21t y t y t y r Λ输出方程是由状态变量和激励信号的线性方程,因此对线性系统而言,输出方程是一组线性方程。
例如,假设系统有个输出,r mrm r r n rn r r r mm n n mm n n e d e d e d x c x c x c t y e d e d e d x c x c x c t y e d e d e d x c x c x c t y +++++++=+++++++=+++++++=ΛΛMΛΛΛΛ22112211222212122221212121211112121111)()()(则,A B矩阵形式为:)(10081910120010321'3'2'1t e x x x x x x ⎥⎥⎦⎤⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎦⎤⎢⎢⎣⎡---=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡01000112198⎡⎤⎢⎥∴=⎢⎥⎢⎥---⎣⎦A 依此方法选择的状态变量常称为相变量状态变量,状态方程叫相变量状态方程。
状态方程和输出方程中的系数矩阵与输入输出方程有关。
[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=3210410)(x x x t y 001⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦B []1040=C 0=D矩阵形式为:1211012110''13'22'1)()(+--+++=+----====m m n n n nn x b x b x b t y t e x a x a x a x x xx x x x ΛΛM )(1000100010211210''2'1t e x x x a a a a x x x n n n ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡-M M ΛM ΛΛM[]001111n n n n n nb b a b b a b b a b --∴=---=C D L 当时,矩阵不再为0。
第二章 状态空间表达式的解3-2-1 试求下列矩阵A 对应的状态转移矩阵φ(t )。
(1) ⎥⎦⎤⎢⎣⎡-=2010A (2) ⎥⎦⎤⎢⎣⎡-=0410A (3) ⎥⎦⎤⎢⎣⎡--=2110A (4) ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=452100010A (5)⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=0000100001000010A (6)⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=λλλλ000100010000A 【解】:(1) (2) (3) (4)特征值为:2,1321===λλλ。
由习题3-1-7(3)得将A 阵化成约当标准型的变换阵P 为⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=421211101P ,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡----=-1211321201P线性变换后的系统矩阵为:(5)为结构四重根的约旦标准型。
(6)虽然特征值相同,但对应着两个约当块。
或}0100010000{])[()(1111----⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡------=-=Φλλλλs s s s L A sI L t 3-2-2 已知系统的状态方程和初始条件 (1)用laplace 法求状态转移矩阵; (2)用化标准型法求状态转移矩阵; (3)用化有限项法求状态转移矩阵; (4)求齐次状态方程的解。
【解】:(1) (2)特征方程为: 特征值为:2,1321===λλλ。
由于112==n n ,所以1λ对应的广义特征向量的阶数为1。
求满足0)(11=-P A I λ的解1P ,得:0110000000312111=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--P P P ,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=0011P 再根据0)(22=-P A I λ,且保证1P 、2P 线性无关,解得:对于当23=λ的特征向量,由0)(33=-P A I λ容易求得: 所以变换阵为:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-==110010001321P P P P ,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=-1100100011P 线性变换后的系统矩阵为:(3)特征值为:2,1321===λλλ。