离散时间系统状态方程和输出方程的求解
- 格式:pdf
- 大小:517.69 KB
- 文档页数:21
差分方程状态方程和输出方程
差分方程是一种描述离散时间系统动态行为的数学模型,它由状态方程和输出方程组成。
状态方程描述系统的状态随时间的演化规律,输出方程描述系统的输出与状态之间的关系。
状态方程通常采用一阶差分方程的形式,即:
x(k+1) = f(x(k), u(k))
其中,x(k)表示系统在时刻k的状态,u(k)表示系统在时刻k的输入,f是状态转移函数,它描述了系统状态如何随时间演化。
状态转移函数f可以是线性的,也可以是非线性的,它的形式取决于系统的特性。
输出方程通常采用线性方程的形式,即:
y(k) = g(x(k), u(k))
其中,y(k)表示系统在时刻k的输出,g是输出函数,它描述了系统的输出与状态和输入之间的关系。
输出函数g通常是线性的,它可以表示为:
y(k) = Cx(k) + Du(k)
其中,C和D是系统的输出矩阵,它们描述了系统的输出与状态和输入之间的关系。
差分方程状态方程和输出方程是描述离散时间系统动态行为的重要工具,它们可以用于分析和设计各种控制系统。
例如,可以使用状态方程和输出方程来设计控制器,以实现对系统的稳定性、响应速度和鲁棒性等性能指标的优化。
差分方程状态方程和输出方程是描述离散时间系统动态行为的重要工具,它们可以用于分析和设计各种控制系统。
在实际应用中,需要根据系统的特性选择合适的状态转移函数和输出函数,以实现对系统的优化控制。

状态方程和输出方程状态方程和输出方程是系统理论中的重要概念,用于描述动态系统的行为。
状态方程描述了系统的状态如何随时间变化,而输出方程则描述了系统的输出如何由状态决定。
在这篇文章中,我们将详细介绍状态方程和输出方程的概念、推导方法和应用。
一、状态方程状态方程又称为状态空间方程或系统方程,用数学表示为:x(t)=A·x(t-1)+B·u(t)其中,x(t)为系统的状态向量,表示系统在其中一时刻的状态;A为状态转移矩阵,描述了系统的状态如何随时间变化;x(t-1)为系统在上一时刻的状态;B为输入矩阵,描述了外部输入信号如何影响系统的状态;u(t)为外部输入信号,表示系统在其中一时刻的输入。
状态方程的物理意义是描述系统的动态行为。
通过状态方程,我们可以了解系统的状态如何由前一时刻的状态和当前的输入决定。
状态方程是描述系统动态行为的基础,可以用于系统的建模、分析和控制。
推导状态方程的方法有两种:物理建模和数学建模。
物理建模是通过系统的物理原理和方程来推导状态方程;数学建模是通过对系统的输入输出进行数学分析,从而推导出状态方程。
物理建模适用于具有物理背景的系统,如机械系统、电路系统等;数学建模适用于所有类型的系统。
二、输出方程输出方程又称为观测方程或测量方程,用数学表示为:y(t)=C·x(t)其中,y(t)为系统的输出向量,表示系统在其中一时刻的输出;C为观测矩阵,描述了系统的输出如何由状态决定;x(t)为系统在其中一时刻的状态。
输出方程的物理意义是描述系统的输出如何由状态决定。
通过输出方程,我们可以了解系统的输出如何与系统的状态相关。
输出方程是描述系统的输出特性的关键,可以帮助我们理解系统的性能和行为。
推导输出方程的方法有直接测量和模型匹配。
直接测量是通过对系统的输出进行实际测量,从而得到输出方程;模型匹配是通过对系统进行数学建模,从而推导出输出方程。
直接测量适用于系统的输出直接可测量的情况;模型匹配适用于系统的输出无法直接测量或想要通过模型进行预测的情况。
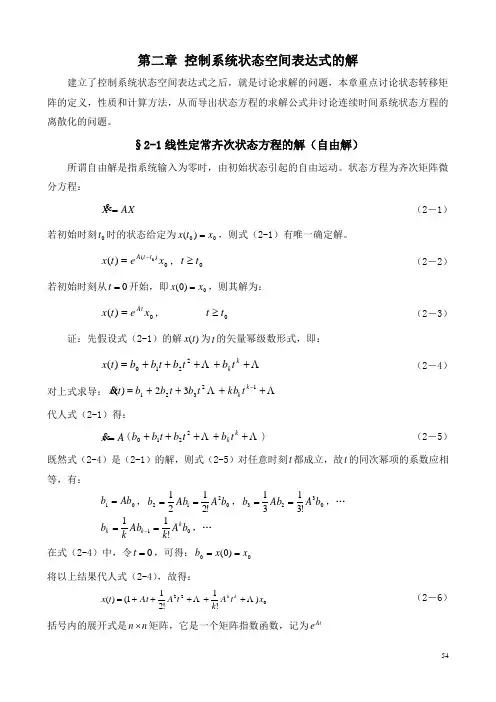
第二章 控制系统状态空间表达式的解建立了控制系统状态空间表达式之后,就是讨论求解的问题,本章重点讨论状态转移矩阵的定义,性质和计算方法,从而导出状态方程的求解公式并讨论连续时间系统状态方程的离散化的问题。
§2-1线性定常齐次状态方程的解(自由解)所谓自由解是指系统输入为零时,由初始状态引起的自由运动。
状态方程为齐次矩阵微分方程:AX X= (2-1)若初始时刻0t 时的状态给定为00)(x t x =,则式(2-1)有唯一确定解。
0)(0)(x e t x t t A -=,0t t ≥(2-2)若初始时刻从0=t 开始,即0)0(x x =,则其解为:0)(x e t x At =, 0t t ≥(2-3)证:先假设式(2-1)的解)(t x 为t 的矢量幂级数形式,即:+++++=k k t b t b t b b t x 2210)((2-4)对上式求导: ++++=-1232132)(k k t kb t b t b b t x代人式(2-1)得:A x= ( +++++kk t b t b t b b 2210) (2-5)既然式(2-4)是(2-1)的解,则式(2-5)对任意时刻t 都成立,故t 的同次幂项的系数应相等,有:01Ab b =,0212!2121b A Ab b ==,0323!3131b A Ab b ==,… 01!11b A k Ab kb k k k ==-,… 在式(2-4)中,令0=t ,可得:00)0(x x b == 将以上结果代人式(2-4),故得:022)!1!211()(x t A k t A At t x k k +++++= (2-6)括号内的展开式是n n ⨯矩阵,它是一个矩阵指数函数,记为At e221112!!At k ke At A t A t K =+++++ (2-7)式(2-6)可表示为:0()At x t e x =再用)(0t t -代替)0(-t ,即在代替t 的情况下,同样证明0)(0)(x e t x t t A -=的正确性。
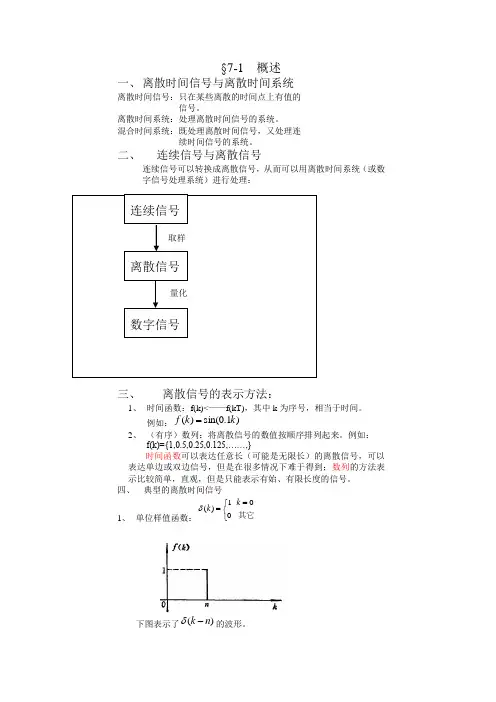
§7-1 概述一、 离散时间信号与离散时间系统离散时间信号:只在某些离散的时间点上有值的信号。
离散时间系统:处理离散时间信号的系统。
混合时间系统:既处理离散时间信号,又处理连续时间信号的系统。
二、 连续信号与离散信号连续信号可以转换成离散信号,从而可以用离散时间系统(或数字信号处理系统)进行处理:三、 离散信号的表示方法:1、 时间函数:f(k)<——f(kT),其中k 为序号,相当于时间。
例如:)1.0sin()(k k f =2、 (有序)数列:将离散信号的数值按顺序排列起来。
例如:f(k)={1,0.5,0.25,0.125,……,}时间函数可以表达任意长(可能是无限长)的离散信号,可以表达单边或双边信号,但是在很多情况下难于得到;数列的方法表示比较简单,直观,但是只能表示有始、有限长度的信号。
四、 典型的离散时间信号1、 单位样值函数:⎩⎨⎧==其它001)(k k δ下图表示了)(n k -δ的波形。
连续信号离散信号 数字信号 取样量化这个函数与连续时间信号中的冲激函数)(t δ相似,也有着与其相似的性质。
例如:)()0()()(k f k k f δδ=, )()()()(000k k k f k k k f -=-δδ。
2、 单位阶跃函数:⎩⎨⎧≥=其它001)(k k ε这个函数与连续时间信号中的阶跃函数)(t ε相似。
用它可以产生(或表示)单边信号(这里称为单边序列)。
3、 单边指数序列:)(k a k ε比较:单边连续指数信号:)()()(t e t e t a at εε=,其底一定大于零,不会出现负数。
4、 单边正弦序列:)()cos(0k k A εφω+(a) 0.9a = (d) 0.9a =-(b) 1a = (e) 1a =-(c) 1.1a = (f) 1.1a =-双边正弦序列:)cos(0φω+k A五、 离散信号的运算1、 加法:)()()(21k f k f k f +=<—相同的k 对应的数相加。

matlab离散化状态空间模型-回复如何使用MATLAB 进行离散化状态空间模型的建模和分析离散化状态空间模型是一类广泛应用于系统建模和分析的数学工具。
它在控制论和动态系统理论中有着重要的作用。
MATLAB 是一个功能强大的数学软件,可以方便地进行离散化状态空间模型的建模和分析。
本文将介绍如何使用MATLAB 进行离散化状态空间模型的建模和分析。
一、离散化状态空间模型的概念和原理离散化状态空间模型是描述离散时间系统动态特性的一种数学模型。
它由状态方程和输出方程组成。
状态方程描述了系统状态的演化规律,输出方程描述了系统输出与状态的关系。
离散时间系统的状态方程和输出方程可以用矩阵形式表示如下:x(k+1) = Ax(k) + Bu(k)y(k) = Cx(k) + Du(k)其中,x(k) 表示系统在时刻k 的状态向量,u(k) 表示系统在时刻k 的输入向量,y(k) 表示系统在时刻k 的输出向量,A、B、C、D 分别为系统的状态矩阵、输入矩阵、输出矩阵和直接传递矩阵。
离散化状态空间模型的建模需要将连续时间系统的状态空间模型进行离散化处理。
离散化的基本原理是将连续时间系统的状态方程和输出方程在一段时间内进行离散化处理,使得系统的状态和输出在该离散时间内近似地描述系统的动态特性。
二、使用MATLAB 进行离散化状态空间模型的建模和分析的步骤1. 定义系统的连续时间状态空间模型首先,需要定义连续时间状态空间模型的状态矩阵A、输入矩阵B、输出矩阵C 和直接传递矩阵D。
这些矩阵的维度和元素值反映了系统的动态特性。
例如,假设我们有一个连续时间状态空间模型:dx(t)/dt = Ax(t) + Bu(t)y(t) = Cx(t) + Du(t)其中,状态向量x(t) 的维度为n,输入向量u(t) 的维度为m,输出向量y(t) 的维度为p。
那么,我们可以用MATLAB 编写如下代码定义连续时间状态空间模型:A = [a11, a12, ..., a1n; a21, a22, ..., a2n; ..., an1, an2, ..., ann];B = [b11, b12, ..., b1m; b21, b22, ..., b2m; ..., bn1, bn2, ..., bnm];C = [c11, c12, ..., c1n; c21, c22, ..., c2n; ..., cp1, cp2, ..., cpn];D = [d11, d12, ..., d1m; d21, d22, ..., d2m; ..., dp1, dp2, ..., dpm];2. 将连续时间状态空间模型离散化在MATLAB 中,可以使用c2d 函数将连续时间状态空间模型离散化为离散时间状态空间模型。
离散系统状态方程一、概述离散系统是指系统的输入和输出都是离散信号的系统。
离散系统的状态方程描述了系统的状态随时间变化的规律。
常见的离散系统状态方程的求解方法有前向欧拉法和后向欧拉法。
二、离散系统状态方程的基本形式离散系统状态方程通常采用以下一般形式表示:x(k+1) = Ax(k) + Bu(k)y(k) = Cx(k) + Du(k)其中,x(k)是系统的状态向量,A是状态转移矩阵,B是输入矩阵,u(k)是系统的输入向量,y(k)是系统的输出向量,C是输出矩阵,D是直达矩阵。
三、前向欧拉法1. 基本原理前向欧拉法是一种离散时间下的常微分方程近似数值解法。
对于给定的状态方程,前向欧拉法通过欧拉逼近求解系统状态在下一个离散时间点的值。
2. 求解步骤给定系统状态方程 x(k+1) = Ax(k) + Bu(k),可以用前向欧拉法求解下一个时刻的状态值:x(k+1) = (I + hA)x(k) + hBu(k)其中,h为离散时间间隔。
3. 优缺点前向欧拉法求解简单且易于实现,但由于近似计算的原因,在一些特定系统下可能存在数值不稳定的情况。
四、后向欧拉法1. 基本原理后向欧拉法是另一种常微分方程的数值解法。
对于给定的状态方程,后向欧拉法通过在欧拉逼近的基础上,利用下一个时刻的状态值反推当前时刻的状态值。
2. 求解步骤给定系统状态方程 x(k+1) = Ax(k) + Bu(k),可以用后向欧拉法求解当前时刻的状态值:x(k) = (I - hA)^(-1)x(k+1) - h(I - hA)^(-1)Bu(k+1)其中,h为离散时间间隔。
3. 优缺点后向欧拉法相比于前向欧拉法,更加稳定且精确,但求解过程较为复杂,通常需要使用数值计算方法求解线性方程组。
五、总结离散系统状态方程描述了离散系统的状态随时间变化的规律,对于工程控制和信号处理等领域有着重要的应用。
前向欧拉法和后向欧拉法都是常见的离散系统状态方程求解方法,各有优缺点,应根据实际情况选择合适的方法进行求解。
差分方程状态方程和输出方程差分方程是数学中重要的一种方程,它可以描述离散时间间隔内变量的变化规律,是掌握离散时间系统动态特性的基础。
差分方程包含两部分:状态方程和输出方程。
一、状态方程状态方程描述离散时间系统中状态变量的演变规律,它通常为一个递推式,其中包含了系统当前时刻的状态和上一时刻的状态,以及此时时刻的输入。
状态方程的形式通常为:x(k+1) = f(x(k), u(k))其中,x(k)是系统在k时刻的状态变量,u(k)是系统在k时刻的输入,f( )是状态方程中的映射函数,它表示系统的状态转移规律。
状态方程是描述离散时间系统动态特性的关键。
通过状态方程,我们可以了解系统某一时刻的状态变化情况,并进一步推断出未来时刻的状态变化趋势。
二、输出方程输出方程描述系统的输出与状态变量之间的关系,它通常为一个函数式。
输出方程的形式通常为:y(k) = g(x(k), u(k))其中,y(k)是系统在k时刻的输出,x(k)和u(k)的含义与状态方程一致,g( )是输出方程中的映射函数,它表示系统的输出转换规律。
输出方程的主要作用是描述系统的输出与状态变量之间的关系。
通过输出方程,我们可以了解系统在某一时刻的输出情况,并进一步推断出未来时刻的输出趋势。
总体上,差分方程作为离散时间系统模型的核心,包含状态方程和输出方程两部分。
状态方程描述了系统随时间的演变规律,而输出方程描述了状态与输出之间的关系。
只有了解了差分方程的状态方程和输出方程,才能准确把握系统的动态特性,进一步进行控制和优化。
目录I 考查目标 ......................................................................................... 2 II 考试形式和试卷结构 ................................................................... 2 III 考查内容 ..................................................................................... 3 IV. 题型示例及参考答案 (4)全国硕士研究生入学考试信号与线性系统考试大纲真题及答案I 考查目标信号与线性系统课程研究生考试范围限于确定性信号(非随机性信号)经线性时不变系统传输与处理的基本理论及基本分析方法。
测试主要分两个方面:一是基本理论。
测试考生对基本理论概念掌握的深度与熟练程度;二是综合解决问题的能力。
要求考生熟练掌握连续时间信号与系统、离散时间信号与系统的时域分析法及其相应的频域分析、复频域分析和z变换分析法。
具体要求如下:1、掌握确定性信号的时域运算与变换;掌握系统线性时不变性质的判定;掌握系统零输入响应、零状态响应和全响应的概念与求解;掌握冲激响应的求解;掌握卷积积分的性质及利用卷积积分求系统零状态响应的方法和物理意义。
2、理解信号正交分解的原理;掌握周期信号和非周期信号的频谱及其特点;重点掌握傅里叶变换及其主要性质、典型周期信号的傅里叶变换;掌握帕色瓦尔定理的主要内容。
3、掌握连续时间系统频域响应函数的求解;熟练掌握周期信号和非周期信号激励下系统响应的求取;掌握系统无失真传输条件;掌握理想低通滤波器频响特性及其冲激响应特点;了解系统物理可实现条件、佩利-维纳准则;理解希尔伯特变换原理;熟练掌握调制与解调的原理及其应用;熟练掌握时域采样定理;理解抽样信号的傅立叶变换;了解频分复用和时分复用原理。
差分方程状态方程和输出方程差分方程状态方程和输出方程是系统控制领域中常用的数学工具,用于描述动态系统的行为和输出。
下面,我们将分别介绍差分方程状态方程和输出方程的定义和作用。
差分方程状态方程是描述离散时间系统动态行为的数学模型。
它通过差分方程的形式,将系统的输入和状态变量之间的关系表示出来。
具体而言,差分方程状态方程可以表示为:x(k+1) = A*x(k) + B*u(k)其中,x(k)表示系统在时刻k的状态向量,u(k)表示系统在时刻k 的输入向量,A和B分别是状态转移矩阵和输入矩阵。
差分方程状态方程可以用来描述系统在不同时刻的状态变化情况,从而帮助我们理解系统的动态特性。
差分方程输出方程是描述离散时间系统输出的数学模型。
它通过差分方程的形式,将系统的状态变量和输出之间的关系表示出来。
具体而言,差分方程输出方程可以表示为:y(k) = C*x(k) + D*u(k)其中,y(k)表示系统在时刻k的输出向量,C和D分别是输出矩阵和输入矩阵。
差分方程输出方程可以用来描述系统输出与状态变量和输入之间的关系,从而帮助我们预测系统的输出值。
差分方程状态方程和输出方程在系统控制中起着重要的作用。
它们可以帮助我们分析系统的稳定性、响应特性和控制性能,并设计出合适的控制策略。
通过对差分方程状态方程和输出方程的研究,我们可以深入了解系统的内部机制,从而提高系统的控制效果。
总结起来,差分方程状态方程和输出方程是描述离散时间系统行为和输出的数学模型。
它们在系统控制领域中具有重要的作用,可以帮助我们理解系统的动态特性,并设计出合适的控制策略。
通过对差分方程状态方程和输出方程的研究,我们可以提高系统的控制效果,实现系统的稳定运行和优化控制。