工业机器人操作与编程 认识示教器
- 格式:pptx
- 大小:1.85 MB
- 文档页数:9
工业现场编程-示教器使用工业现场编程-示教器使用1.引言1.1 目的1.2 背景1.3 示例案例2.示教器简介2.1 示教器功能概述2.2 示教器基本操作说明2.2.1 示教器启动和关闭2.2.2 示教器屏幕布局2.2.3 示教器按键功能说明2.2.4 示教器输入输出接口3.控制系统接口3.1 连接示教器和控制系统3.2 示教器与控制系统之间的通信设置3.3 示教器与控制系统的兼容性4.示教器编程功能4.1 示教器编程模式概述4.2 示教器编程语言介绍4.3 示教器编程步骤详解4.3.1 示教器编程环境设置4.3.2 示教器编程指令使用说明 4.3.3 示教器程序的创建与编辑 4.3.4 示教器程序的调试与执行 4.4 示教器编程技巧和注意事项4.4.1 充分利用示教器提供的功能 4.4.2 编写清晰、简洁的程序4.4.3 避免示教器编程常见错误5.示例案例5.1 示例案例一:装配过程5.1.1 任务描述5.1.2 程序设计与编写5.1.3 执行效果和调试过程5.2 示例案例二:焊接操作5.2.1 任务描述5.2.2 程序设计与编写5.2.3 执行效果和调试过程6.附件6.1 示教器使用手册6.2 示教器编程示例代码6.3 相关图片和图表附录1.法律名词及注释- 示教器:指用于在现场对工业进行编程和控制的设备。
- 控制系统:指用于控制工业运动和操作的软件和硬件系统。
- 调试:指对示教器程序进行测试和调整,以确保其正常执行的过程。
- 兼容性:指示教器与控制系统之间能够正常通信和配合使用的程度。

工业机器人示教与编程实训小结本文是一篇关于工业机器人示教与编程实训的小结,主要包含以下方面的内容:机器人示教器操作、机器人编程语言理解、坐标系设置与校正、工具与工件坐标设定、程序数据与IO信号配置、运动指令规划与实现以及碰撞检测与安全功能应用。
一、机器人示教器操作在实训中,我们首先学习了如何正确使用机器人的示教器。
示教器是操作和控制机器人运动的主要设备,包括键盘、触摸屏、操纵杆等输入装置。
操作机器人示教器时,需要遵循一定的步骤和注意事项,如确认机器人安全锁定、操作前先选择工具坐标系、运动速度要缓慢等。
二、机器人编程语言理解机器人编程语言是实现机器人运动和任务自动执行的基础。
在实训中,我们学习了常用机器人编程语言的基本概念和应用。
例如,ROBOTICS WORKS软件支持的高级语言Labo,以及示教器上使用的低级语言T-code和R-code。
通过编写简单的程序,我们加深了对编程语言的理解。
三、坐标系设置与校正机器人的坐标系分为世界坐标系、工具坐标系和工件坐标系等。
在实训中,我们学习了如何正确设置和校正这些坐标系。
例如,通过使用机器人自带的传感器或第三方设备进行坐标系校准,确保机器人运动的准确性。
同时,我们也了解了常见问题和解决方法,如碰撞后坐标系失准、校正参数不正确等。
四、工具与工件坐标设定工具坐标系和工件坐标系用于描述机器人末端执行器和工件的位置和姿态。
在实训中,我们学习了如何使用工具和工件坐标系进行运动规划和控制。
例如,通过设定工具坐标系,使机器人在执行某些任务时更加精确;通过设定工件坐标系,实现机器人的自主定位和搬运等功能。
五、程序数据与IO信号配置程序数据和IO信号是机器人执行任务的重要参数。
在实训中,我们学习了如何配置这些参数,并进行仿真和实验。
例如,通过设置程序数据,使机器人在执行循环、条件判断等复杂任务时更加灵活;通过配置IO信号,实现机器人与其他设备的联动和控制。
六、运动指令规划与实现运动指令是控制机器人运动的指令集合。
编号:授课时间:授课班级:工业机器人应用班任课教师:项目名称第二章第一节认识工业机器人示教器学时:2教学目标知识目标1.能够掌握工业机器人示教器的作用2.能够掌握工业机器人示教器的主菜单及子菜单的操作方法技能目标能操作工业机器人示教器设置示教器的显示语言能操作工业机器人示教器进行示教器预留按键的设置能操作工业机器人示教器进行机器人系统的备份与恢复情感态度培养学生热爱学习的良好习惯,通过知识的收集和总结,提高学生理解能力,通过实际操作,提高学生的操作技能。
教学内容认识机器人示教器主要学习机器人示教器的基本结构与主菜单及子菜单的操作,能够使用示教器进行工业机器人常见的相关操作。
重点工业机器人示教器的主菜单及子菜单设置示教器的显示语言示教器预留按键的设置机器人系统的备份与恢复难点示教器预留按键的设置教学策略利用现有ABB工业机器人进行操作,采用现场教学的方式,按照一体化教学的步骤实施教学计划,强调学生的实际操作能力,在做中学,同时充分利用学校现有的教学资源库,最大限度的收集更多更好的网络资源,使课堂教学更生动。
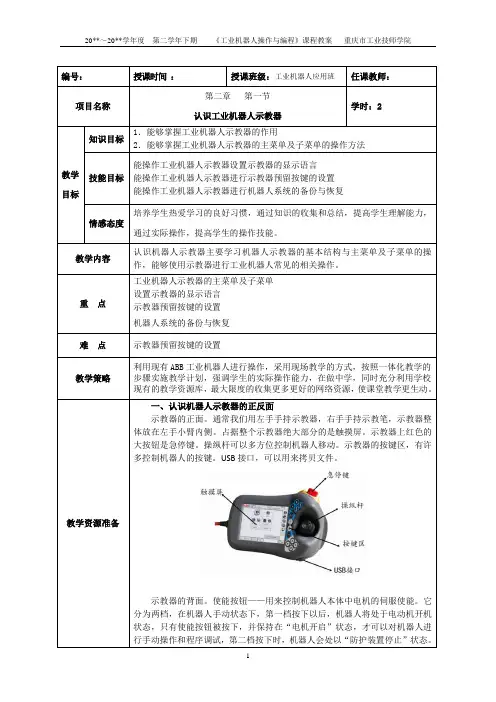
教学资源准备一、认识机器人示教器的正反面示教器的正面。
通常我们用左手手持示教器,右手手持示教笔,示教器整体放在左手小臂内侧。
占据整个示教器绝大部分的是触摸屏。
示教器上红色的大按钮是急停键。
操纵杆可以多方位控制机器人移动。
示教器的按键区,有许多控制机器人的按键。
USB接口,可以用来拷贝文件。
示教器的背面。
使能按钮——用来控制机器人本体中电机的伺服使能。
它分为两档,在机器人手动状态下,第一档按下以后,机器人将处于电动机开机状态,只有使能按钮被按下,并保持在“电机开启”状态,才可以对机器人进行手动操作和程序调试,第二档按下时,机器人会处以“防护装置停止”状态。
当发生危险时,人本能地将使能按钮松开或按紧,在这两种情况下机器人都会立刻停止,保证人身与设备的安全。
抽出触摸笔即可在触摸屏上使用。
重置按钮可实现示教器重置功能。
工业机器人操作与编程认识示教器示教器是工业机器人操作与编程的核心工具之一、它通常由两部分组成:示教工具和示教器控制台。
示教工具是用来操作机器人的手持设备,类似于遥控器,通过示教工具可以对机器人的动作、位置等进行控制。
示教器控制台用来将示教工具上的操作输入到机器人的控制系统中,并将其转化为机器人能够执行的指令。
示教器的操作方式主要有两种:在线示教和离线示教。
在线示教是指将示教工具与机器人直接连接,通过示教工具对机器人进行实时操作和编程。
离线示教是指将示教工具与机器人分开使用,通过示教工具对机器人的动作、位置等进行事先录制,并将其保存到示教工具中,然后再将录制的指令上传到机器人的控制系统中。
示教器的操作和编程过程中需要注意以下几个关键点:首先是机器人的基准点的设置。
基准点是机器人运动的参考点,一般是指机器人的起始位置或者一些固定位置。
在操作和编程之前,需要将机器人移动到基准点,并将其设置为机器人的原点。
其次是机器人的运动学参数的设置。
运动学参数是指机器人的关节角度、位置和速度等参数,通过设置这些参数可以对机器人的运动过程进行控制。
最后是机器人的路径规划和轨迹控制。
路径规划是指对机器人的运动路径进行规划,使其能够顺利地完成任务。
轨迹控制是指对机器人的运动轨迹进行控制,使其能够以指定的速度和加速度运动。
工业机器人操作与编程的示教器在工业生产中起着至关重要的作用。
通过示教器,工人可以对机器人进行灵活的操作和编程,使其能够完成各种复杂的任务。
示教器的使用也使得机器人的操作和编程变得更加简单和高效,提高了工业生产的效率和质量。
总结起来,工业机器人操作与编程的示教器是现代工业生产中不可或缺的工具。
它通过示教工具和示教器控制台的配合,实现对机器人的操作和编程。
示教器的操作方式主要有在线示教和离线示教,其中离线示教还可以分为点位示教和路径示教。
在操作和编程过程中需要注意设置机器人的基准点、运动学参数和路径规划等关键点。

工业机器人操作与编程认识示教器在当今的工业生产领域,工业机器人已经成为了不可或缺的重要角色。
它们能够高效、精准地完成各种复杂的任务,大大提高了生产效率和产品质量。
而要让工业机器人按照我们的意愿进行工作,就离不开示教器这个关键的工具。
接下来,让我们一起深入了解一下工业机器人的示教器。
示教器,从外观上看,它通常是一个类似于手持终端的设备,具有显示屏、操作按键和摇杆等部分。
虽然它的样子可能并不起眼,但它却承载着控制工业机器人的重要使命。
示教器的主要功能之一就是实现对工业机器人的手动操作。
通过操作摇杆或者按键,我们可以让机器人的各个关节运动到指定的位置,就好像我们亲手在摆弄一个巨大的机械手臂一样。
这种手动操作的方式对于机器人的初始设置、位置调整以及故障排除等环节都非常重要。
编程功能也是示教器的核心之一。
我们可以使用示教器上的编程界面和指令,为机器人编写执行任务的程序。
这些程序可以告诉机器人在什么时间、以什么样的速度和姿态去完成特定的动作。
比如说,让机器人从一个位置抓取一个零件,然后移动到另一个位置进行装配,这一系列的动作都可以通过编程在示教器中设定好。
示教器的显示屏则为我们提供了丰富的信息反馈。
在操作和编程过程中,显示屏会实时显示机器人的当前位置、姿态、运动速度等参数,让我们能够清晰地了解机器人的工作状态。
同时,如果在操作中出现了错误或者警告信息,也会在显示屏上及时提示,以便我们能够迅速采取措施进行处理。
不同品牌和型号的工业机器人,其示教器的外观和操作方式可能会有所差异,但它们的基本原理和功能是相似的。
一般来说,示教器的操作界面都设计得比较直观和简洁,以方便操作人员快速上手。
在使用示教器之前,我们需要先对其进行一些基本的设置和连接。
首先,要确保示教器与机器人的控制系统之间建立稳定的通信连接。
然后,根据具体的工作任务和机器人的性能要求,设置一些参数,比如运动速度限制、精度要求等。
当我们开始操作示教器时,需要特别注意安全问题。

工业机器人示教器的使用操作流程1. 简介工业机器人示教器是用于控制和操作工业机器人的设备。
它可以通过简单的操作,实现工业机器人的示教和编程。
本文将介绍工业机器人示教器的使用操作流程,帮助用户快速上手使用。
2. 准备工作在开始使用工业机器人示教器之前,需要完成以下准备工作:•确认机器人的品牌和型号,并准备相应的示教器;•检查机器人示教器的电源和连接线是否正常;•确保机器人与示教器之间的通信正常。
3. 示教器的基本功能工业机器人示教器通常具有以下基本功能:•示教功能:可以通过示教器直接操作机器人,实现运动轨迹的示教;•编程功能:可以利用示教器进行机器人程序的编写和编辑;•监控功能:可以实时监控机器人的状态和运行情况;•参数设置功能:可以设置机器人的相关参数。
4. 使用操作流程4.1 连接示教器首先,将示教器与机器人连接。
确保示教器和机器人之间的通信连接正常。
通常示教器与机器人之间通过连接线连接,确保连接线的接口和插槽对应正确。
4.2 打开示教器使用电源将示教器接通,然后按下示教器上的开/关按钮,启动示教器。
等待示教器系统启动完成。
4.3 连接机器人在示教器上选择机器人类型和机器人的通信方式,并设置通信参数。
确保示教器和机器人之间的通信正常。
4.4 示教运动轨迹通过示教器的示教功能,可以实现对机器人运动轨迹的示教。
具体操作如下:1.选择示教模式:在示教器上选择示教模式,例如手动示教模式或自动示教模式。
2.选择运动方式:选择机器人的运动方式,例如点动、连续运动或连续路径运动。
3.进行示教:根据机器人运动的要求,在示教器上操作,将机器人移动到想要的位置。
示教器通常具有按钮、手柄或触摸屏等操作方式。
4.记录示教点位:在示教过程中,示教器会记录机器人的示教点位信息。
可以通过示教器上的按钮或菜单,将示教点位保存和命名。
4.5 编写机器人程序基于示教器记录的示教点位信息,可以进行机器人的程序编写。
具体操作如下:1.进入编程模式:在示教器上选择编程模式,进入机器人的编程环境。
工业机器人操作与编程认识示教器一、引言工业机器人是一种能够代替人类完成重复、繁琐或危险工作任务的自动化设备。
工业机器人不仅能够提高生产效率,减少人力成本,还能够提高产品质量和增强企业竞争力。
而为了能够高效地操作和编程工业机器人,需要使用示教器。
二、示教器的概念示教器是一种专门用于操作和编程机器人的设备。
它包括硬件和软件两个部分。
硬件部分主要包括示教器手柄、操作按钮、触摸屏等。
软件部分主要包括机器人操作系统、编程界面等。
示教器用于实现与机器人的交互操作和编程指令的输入。
三、示教器的操作1.连接示教器和机器人将示教器与机器人通过通信线缆进行连接。
连接方式主要有有线连接和无线连接两种。
在连接完成后,示教器即可与机器人进行通信。
2.示教器的操作按钮示教器上通常有各种操作按钮,如启动按钮、暂停按钮、停止按钮等。
通过按下这些按钮,可以控制机器人的启停和运动。
3.示教器的手柄示教器手柄是示教器的一个重要组成部分,用于操作机器人的运动。
手柄上通常有两个摇杆,分别用于控制机器人的位置和方向。
通过手柄的操作,可以实现机器人的直线运动、旋转运动等。
4.示教器的触摸屏四、示教器的编程示教器的编程主要采用图形化编程语言,如流程图或拖拽式编程。
通过图形界面,可以方便地拖拽编程块,设置参数,编写机器人的操作程序。
同时,示教器也支持文本编程语言,如C++、Python等。
示教器的编程步骤如下:1.创建工作流程首先,需要创建一个工作流程,用于描述机器人的操作步骤和流程。
2.添加编程块在工作流程中,添加各种编程块,如移动块、旋转块、抓取块等。
通过设置编程块的参数,可以实现机器人的具体动作。
3.设置编程块的参数对于每个编程块,需要设置相应的参数,如移动的距离、速度等。
通过调整这些参数,可以精确控制机器人的运动轨迹和速度。
4.编写机器人的操作程序在添加完编程块并设置好参数后,就可以编写机器人的操作程序了。
操作程序由多个编程块组成,按照顺序执行。