关节臂式柔性坐标测量机测量空间分析
- 格式:pdf
- 大小:203.44 KB
- 文档页数:2
关节臂测量机工作原理
关节臂测量机是一种用于测量物体位置和方向的机器人设备。
它通常由一个机械臂和一套传感器组成。
工作原理如下:
1. 目标识别:关节臂测量机首先需要通过视觉或其他传感器来识别目标物体。
这可以通过摄像头、激光传感器或其他感知设备实现。
2. 姿态估计:一旦目标物体被识别,关节臂测量机需要根据目标物体的位置和方向来估计其姿态。
这可以通过计算物体的旋转角度和位置来实现。
3. 关节控制:根据目标物体的姿态估计,关节臂测量机会计算出每个关节的运动和位置。
它会使用驱动器或电机来控制关节的旋转,以将测量设备定位到正确的位置。
4. 测量数据记录:一旦关节臂测量机定位到正确的位置,它会使用内置的传感器来测量目标物体的位置、形状或其他特性。
这些传感器可以是激光测距仪、相机或其他测量设备。
关节臂测量机的工作原理可以根据具体的设备和应用而有所差异,但通常包括目标识别、姿态估计、关节控制和测量数据记录等步骤。
这些步骤使得关节臂测量机能够准确地测量目标物体的位置和方向,广泛用于工业生产、科学研究和其他领域。
摘要关节式测量臂的结构参数误差是影响其测量精度的最主要因素,各关节的结构参数误差对测量机精度的影响差异很大,并且这些结构参数误差造成的测量误差随着测量机位姿的变化而变化。
本课题建立了关节式测量臂机器人的坐标系统及位姿误差模型,设计了基于MATLAB的误差仿真软件,根据误差仿真结果绘制了关节空间的误差分布图,分析了测量臂各关节结构参数及测量臂位姿对其测量精度的影响,便于关节式测量臂的合理地使用,研究结果为关节式测量臂的误差补偿提供了依据。
关键词:关节式测量臂;误差分析;位姿;MATLAB仿真ABSTRACTThe kinematics parameter errors of the articulated measuring arm are the most important factors that affect its measuring accuracy, the kinematics parameter errors of different joints can cause different measuring errors, and the measuring errors are changing as the articulated measuring arm pose varies. The position and orientation error model of the articulated measuring arm has been built, and an error analysis program based on MATLAB has been developed. The error distribution map has been plotted, the effects of the structural parameters and poses of the articulated measuring arm on the measuring accuracy has been analyzed. The research result provides a basic reference for the error compensation of robots.Key words: articulated measuring arm; error analysis; position and orientation;MATLAB simulation目录第一章绪论 (1)1.1引言 (1)1.2关节式测量臂的误差源 (1)1.3影响关节式测量臂位姿精度的主要因素 (3)1.4本文研究内容 (4)第二章六自由度关节式测量臂运动分析 (5)2.1运动学分析概述 (5)2.1.1坐标变换 (6)2.1.2齐次变换 (8)2.2关节式测量臂D-H模型建立 (8)2.2.1D-H模型建立的方法 (8)2.2.2关节式测量臂的D-H矩阵模型 (9)2.3本章小结 (12)第三章基于MA TLAB的关节式测量臂误差分析 (13)3.1 MATLAB简介 (13)3.2 误差分析界面设计 (13)3.3结构参数误差仿真分析 (17)3.3.1关节转角误差θ对测量臂精度的影响分析 (18)3.3.2关节扭转角误差α对测量臂精度的影响分析 (21)3.3.3杆长误差d对测量臂精度的影响分析 (25)3.3.4关节长度误差a对测量臂精度的影响分析 (27)3.3.5提高测量臂精度的措施 (30)3.4本章小结 (31)第四章总结与展望 (32)参考文献 (33)附录 (34)附录1 (34)附录2 (41)谢辞.......................................................................................................... 错误!未定义书签。
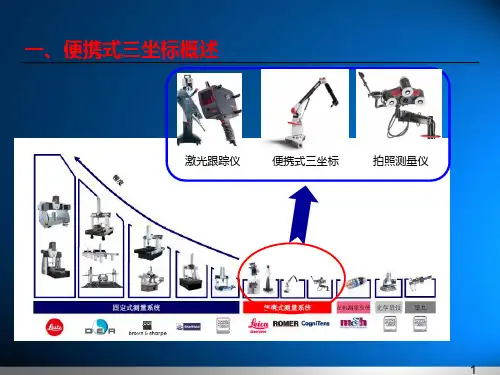
关节臂三坐标测量仪使用方法1. 简介关节臂三坐标测量仪是一种用于测量物体三维空间位置和姿态的精密测量设备。
它采用关节臂结构,能够灵活自由地移动和旋转,具有高精度和高稳定性,广泛应用于工业制造、机械加工、航空航天等领域。
本文将详细介绍关节臂三坐标测量仪的使用方法,包括设备准备、操作步骤、数据处理等内容,帮助用户快速上手并正确地使用该设备。
2. 设备准备在开始使用关节臂三坐标测量仪之前,需要进行以下准备工作:2.1 检查设备完整性检查设备是否完整,并确保所有零部件齐全。
包括主机、控制器、触发器、传感器等。
2.2 连接电源与通信线路将主机与电源连接,并确保电源正常工作。
同时,根据需要连接通信线路,以实现与计算机或其他外部设备的数据传输。
2.3 安装校准板校准板是关节臂三坐标测量仪的重要配件,用于校准设备的测量精度。
将校准板固定在测量区域内的合适位置,并确保其表面平整、无损坏。
2.4 调整设备位置根据实际需求,调整关节臂三坐标测量仪的位置和方向,使其能够覆盖待测物体的整个空间范围。
3. 操作步骤关节臂三坐标测量仪的操作步骤如下:3.1 打开软件在计算机上打开关节臂三坐标测量仪的控制软件,并确保与设备正常连接。
3.2 标定设备在进行实际测量之前,需要对关节臂三坐标测量仪进行标定。
按照软件提示,依次进行零点标定、轴向标定和角度标定等步骤,以确保设备的测量精度和准确性。
3.3 设置测量参数根据待测物体的特点和需求,设置合适的测量参数。
包括采样频率、数据存储方式、坐标系选择等。
3.4 放置待测物体将待测物体放置在关节臂三坐标测量仪的测量区域内,并调整其位置和姿态,使其符合测量要求。
3.5 进行测量点击软件界面上的“开始测量”按钮,关节臂三坐标测量仪将自动进行测量。
在此过程中,设备会通过传感器采集物体的位置和姿态信息,并实时显示在软件界面上。
3.6 数据处理与分析测量完成后,可以对采集到的数据进行处理和分析。
常见的处理方式包括数据平滑、滤波、坐标转换等。
关节臂式坐标测量机参数标定方法王学影;王华;陆艺;张培培【摘要】采用对称点法对关节臂式坐标测量机的各参数进行标定.该标定方法把各参数分离,使标定过程更简单.首先,在D-H参数建模法的基础上,利用基于准球坐标系的建模方法,建立了关节臂式坐标测量机的数学模型,使关节间各个参数正交,进而推导了运动学方程.借助设计的固紧装置,在ROMER Infinite 2.0型关节臂式坐标测量机上运用该方法进行了标定实验,得出了坐标测量机的结构参数,验证了参数标定方法的可行性和实验结果的准确性,为进一步提高关节臂式坐标测量机的测量精度奠定了基础.【期刊名称】《农业机械学报》【年(卷),期】2016(047)006【总页数】5页(P408-412)【关键词】关节臂式坐标测量机;参数标定;对称点法【作者】王学影;王华;陆艺;张培培【作者单位】中国计量大学计量测试工程学院,杭州310018;中国计量大学计量测试工程学院,杭州310018;中国计量大学计量测试工程学院,杭州310018;中国计量大学计量测试工程学院,杭州310018【正文语种】中文【中图分类】TH721关节臂式坐标测量机作为—种便携的测量仪器在工业生产中的应用越来越广泛[1-2]。
关节臂式坐标测量机参数的标定,直接影响着测量精度,从而影响到整个工业的生产过程[3-5]。
目前国外对关节臂式坐标测量机在参数标定方面的研究较多且深入。
KOVAC等[6]设计了—种专用量具结合商业化软件对关节臂式坐标测量机进行标定;FURUTANI等[7]利用装有多个标准球的金属板对关节臂式坐标测量机进行标定;SANTOLARIA等[8]使用拥有14个球的球形量规,建立基于傅里叶多项式的误差模型对关节臂式坐标测量机的参数误差进行了估计辨识;ACERO等[9]利用激光跟踪仪进行实验。
国内对参数标定这方面的研究相对较少。
主要方法有根据高精度正交三坐标测量机提供的标准,运用最小二乘参数辨识法对关节臂式坐标测量机进行标定[10];使用单点锥窝,运用模拟退火算法实现关节臂式坐标测量机的参数辨识[11];基于遗传算法对关节臂式坐标测量机的标定[12]。
关节臂坐标机示值校准不确定度分析作者:石韡蒋加平徐光洁来源:《中国新技术新产品》2019年第18期摘 ;要:JJF 1408—2013《关节臂式坐标测量机校准规范》仅给出了用标准球杆校准关节臂坐标机空间长度示值误差的方法。
该文将提出用3等量块校准关节臂坐标机空间长度示值误差的方法,并分析其不确定度,确定该方法的有效性。
确定此方法在校准实验室应用的科学性和可行性。
对于测量范围较小的关节臂测量机的空间尺寸的校准,使用量块进行校准尤为经济可行。
关键词:关节臂;量块;校准;方法;不确定度中图分类号:TB921 ; ; ; ; ; ; 文献标志码:A关节臂式坐标测量机也称便携式三维测量臂、曲臂式坐标测量机。
由于其便携性,广泛应用于汽车零配件、模具、钣金件、塑料制品、汽车整车等现场测量和检测。
作为测量器具,其示值校准显得尤为重要。
JJF 1408—2013颁布之前,部分校准机构就参照JJF 1064—2010《坐标测量机校准规范》用量块对关节臂测量机的空间尺寸示值进行校准。
JJF 1408—2013颁布之后,采用标准球杆对其空间尺寸示值进行校准的方法受到各校準机构的普遍重视。
但是由于标准球杆的制造工艺不成熟,国产厂家少,购置费用较高,很难得到普遍采用和推广。
1 测量任务及目标不确定度1.1 测量任务用900 mm三等量块校准测量臂空间测量直径1.2 mm,空间长度最大允许误差±0.025 mm 的关节臂坐标机的空间长度示值误差,并给出扩展不确定度。
1.2 测量任务目标不确定度U2 测量方法选用2块量块,短量块的长度为关节臂测量半径的50%~70%,长量块的长度为关节臂测量半径的120%~150%。
量块的摆放姿态为水平、垂直及45°。
每一个位置独立重复测量3次,同时用温度传感器对量块的温度进行实时测量,并计算量块的线膨胀值。
仪器测得值减去量块证书实测值和线膨胀值之和为示值误差,取3次测量结果中示值误差最大值为校准结果。
关节臂测量机调研报告一、引言关节臂测量机是一种用于测量和检测物体位置和角度的机器人装置。
它在工业和科研领域有着广泛的应用,可以帮助提高生产效率和质量控制能力。
本报告旨在对关节臂测量机进行调研,了解其工作原理、应用领域以及市场现状。
二、工作原理关节臂测量机是由多个关节和执行器组成的机械臂系统。
通过控制各个关节的运动,可以实现机械臂的位置和角度的精确控制。
关节臂测量机通常采用传感器来测量目标物体的位置和角度信息,并将这些数据反馈给控制系统进行处理和分析。
三、应用领域1.工业制造:关节臂测量机在工业制造中起到关键作用。
它可以用于装配线上的产品定位和检测,帮助提高装配效率和产品质量。
此外,关节臂测量机还可以用于零件的测量和检验,确保产品符合规格要求。
2.医疗领域:关节臂测量机在医疗领域也有广泛的应用。
例如,在手术中可以用于精确定位和导航,帮助医生进行精准的手术操作。
此外,关节臂测量机还可以用于康复训练,帮助患者恢复功能。
3.科研领域:关节臂测量机在科研领域也扮演着重要角色。
它可以用于实验室中的样品处理和实验操作,帮助研究人员获得准确的数据。
此外,关节臂测量机还可以用于科学仪器的研发和测试。
四、市场现状目前,关节臂测量机市场正处于快速增长阶段。
随着工业自动化的需求不断增加,关节臂测量机在工业制造中的应用越来越广泛。
此外,医疗和科研领域对关节臂测量机的需求也在不断增加。
预计在未来几年,关节臂测量机市场将继续保持良好的发展势头。
然而,关节臂测量机市场竞争也在日益激烈。
据调研数据显示,目前市场上有许多供应商提供各种类型的关节臂测量机,价格和性能都存在较大的差异。
因此,消费者在选择关节臂测量机时需要根据自身需求和预算进行综合考虑。
五、结论关节臂测量机是一种具有广泛应用前景的机器人装置。
它在工业、医疗和科研领域都有着重要的作用,可以帮助提高生产效率和质量控制能力。
目前,关节臂测量机市场呈现出快速增长的趋势。
然而,市场竞争也在加剧,消费者需要根据自身需求和预算选择合适的产品。
doi:12.11323/j.issn.1674-5795.2220.05.06关节臂式测量机动态误差分析与补偿李少芝,杨凯(马鞍山市特种设备监督检验中心,安徽马鞍山243000)摘要:关节臂式测量机误差来源多且易累积放大,其动态误差分析与补偿成为了国内外学者研究的重点。
本文通过分析热变形误差、测量力误差与角度编码误差三种主要误差因素,得出了关节臂式测量机工作的最佳温度值以及表征其动态误差的三种误差因子——最大定位误差(MPE)、残余定位误差(RPE)和关节转角值(JA)。
针对以上误差因子,提出了将T-S模糊神经网络(T-S Fuz z y Nearal Network,T-S FNN)在自学能力和大规模运算方面的优势以及模拟退火算法(Jimulatea Annealing,SA)对全局寻优的能力相结合的新补偿方法,并建立了模型。
经正交实验表明本文提出的补偿方法使动态过程中的误差分别减小了85.5%,82.2%,71.3%,证明该模型能够有效提高测量机的动态测量精度。
关键词:关节臂式测量机;误差建模;误差补偿;模糊神经网络;模拟退火算法中图分类号:TB4文献标识码:A文章编号:1677-5795(2020)27-0231-06Dynamic Error of Analysis and Compensation of Articulated Arm Measuring MachineLI SSaoza::YANG Ka:(Maanshae City Speciai Equipment Supervision and Inspection CenWa,Ma'anshae243000,China) Abstroch:The dynamio error analysis and compeesation of articulatea arm measnring machine han become We focun of research of domestic and foreian scholars.In this paper,by analyzina We tWermai deformation61X00,We measeremest force error and We anala00^11.©^,We op-Wmai temperature value of We arkculated arm measekna machine is oPwinea,and We Wrec error factorc characterizina itc dynamio error,namely maxinium positionina error(MPE),residual positionina error(RPE)and joiat anala value(Ja),are oPwinea.E view of the above error fac-Wo,Wis paper proposes a aw compedsation meWoh which combiaes We aevvnWnes of T-S fuzzy deural rietWorU(T-S FNN)in self-learnina ability and larac-schle operation,and We ability of simulawa andealina(SA)in nobal optimization,and esWeUshes We mohea The orWoponai expekmest shows WaW We error is of dynamio process are reaucea by85.5%,80.2%and71.3%ospectively by We poposeS compeesation meWoh,which proves thaf We moPci can effectively inipove We dynamio measuomect accuocy of We measekna machide.Key words:Anichlatea arm measukna machide;Eor mohelina;Eror compeesation;Fuzzy Nearal Network;Simulawa Andealina0引言三坐标测量机因精度高、环境适用性好,广泛应用于汽车装配、机械加工制造、精密仪器检测等领域。
关节臂式三坐标应用关节臂式三坐标是一种常用的测量装置,可用于对物体的三维空间位置和形状进行精确测量和分析。
它由测量臂、关节、测量头和软件控制系统等组成,广泛应用于工业生产、制造业、质量控制和科学研究等领域。
本文将探讨关节臂式三坐标的应用以及其在不同领域的优势和发展前景。
一、工业制造领域1. 质量检测与控制:关节臂式三坐标可以测量工件的尺寸、形状和位置,用于检测制造过程中的质量问题,并进行实时监控和控制,提高产品的一致性和稳定性。
通过与CAD软件的配合,可以进行三维比对分析,及时发现和修复制造偏差,提高产品的质量和精度。
2. 零件加工与装配:关节臂式三坐标可以测量零件的孔距、孔径、轴线位置等重要参数,用于零件的加工和装配。
它可以通过与数控机床的连接,实现自动化测量和加工,在提高生产效率的同时,保证产品的精度和质量。
3. 逆向工程:关节臂式三坐标可以将复杂的物体进行快速而准确的扫描和重建,用于逆向工程的三维建模和分析。
它可以将实物对象转化为数字模型,可应用于产品设计、原型制作和产品改进等领域。
二、医疗领域1. 骨科测量与手术规划:关节臂式三坐标可以测量和分析骨骼结构,用于骨科医生进行手术规划和操作导航。
通过测量患者的骨骼数据,医生可以更准确地制定手术方案,提高手术的成功率和患者的康复效果。
2. 矫形器设计与定制:关节臂式三坐标可以测量和分析患者的身体形态和尺寸,用于矫形器的设计和个性化定制。
通过精确测量患者的身体数据,可以制造适合患者个体差异的矫形器,提供更好的矫治效果。
三、科研领域1. 材料分析与性能测试:关节臂式三坐标可以测量材料的形状、尺寸和表面特征,用于材料的分析和性能测试。
通过测量材料的三维数据,可以评估材料的质量和性能,为科学家提供有力的数据支持。
2. 错误分析与优化设计:关节臂式三坐标可以对产品或实验结果进行测量和分析,用于错误分析和优化设计。
通过与CAD软件的配合,可以对实验数据和模型进行比对和分析,及时发现和纠正错误,提高实验结果的准确性和可靠性。
第30卷第6期2009年11月计量学报A C T A M E TR O LO G I C A SI N IC AV01.30,N o6N o ve m b e r,2009doi:10.3969/j.i ssn.1000-1158.2009.06.05关节臂式坐标测量机数据采集系统的关键点设计凌清平,刘书桂,王学影,张国雄(天津大学精密测试技术及仪器国家重点实验室,天津300072)摘要:对关节臂式坐标测量机数据采集系统的几个关键点进行了分析设计,其中包括数据同步锁存、对径读数、坐标实时显示。
通过可编程逻辑器件(C PLD)与单片机的结合,完成了光栅信号的滤波、4细分、辨向及可逆计数等功能。
实验证明,该设计能够准确完成测量机的数据采集。
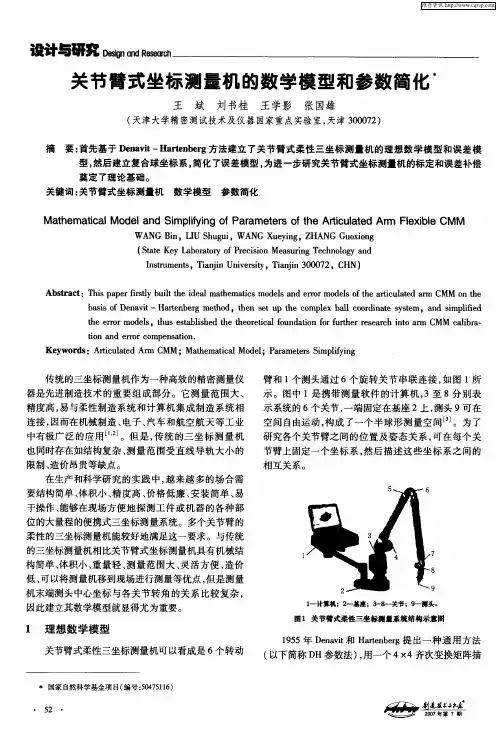
关键词:计量学;坐标测量机;关节臂;非正交坐标系统;同步锁存;对径读数中图分类号:T B92文献标识码:A文章编号:11300—1158(2009)06-0505-04K ey Poi nt s D esi gn of A r t i cul at e d A r m-C m m D at a A cqui si t i on Syst e mL I N G Q i ng—pi ng,L I U Shu—gI l i,W A N G X u e—y i ng,Z H A N G G uo—xi ong (St at e K ey L ab or at o r y of Pr eci s i o n M e弱uri ng T e chnol ogy a nd I nst r u m ent s,Ti anj i n U ni ver si t y,Ti anji n300072,C hi na)A bst r a ct:S ever al ke y point s of ar t i cul at eda皿一CH i l l i dat a acqui s i t i o n sy st e m ana l yz ed a nd d船i gned,i ncl udi ng da t a sync hr onous l a t ch es,p ai r-m d i u8r e adi ngs,and coor di nat es r ea l·t i m e di spl a y.T he com bi nat i on of C PLD a nd A V R m i cr o cm nt r ol l e r com pl et es t he f unct i on s of gr at i ng si gI la l f al t er i ng,4subdi vi ded,di s cer ni ng di r ect i on and r ever si bl e count i ng,a nd on.A c cor di ng t Ot he e xper i m ent,t he dat a col l ect i on of t he m ac hi ne be co m p l el e accur at el y.K e y w ords:M et rol ngy;Coordi nat e m easu r i I l g m achi ne(C M M);A r t i cul at ed ar m;N on-or t hogonal coo r di na t e s ys tem;Synchr onous l a t ch;P ai r-r a di u s陀a di ng1引言关节臂式坐标测量机是一种典型的非正交坐标测量机,它仿照人体手臂的关节结构,将3个杆件和一个测头通过5个旋转关节串联起来。
图1组合式殷钢球棒标准球窝是专门用于关节臂式坐标测量机校准的专用工具。
其材质采用钢制结构,主体为1.5英寸标准金属球,其圆度指标达到2μm。
从一侧去除内部材料,在球心位置处构造出一个标准锥窝,锥窝与测头球径(常用3mm或6mm等)相切,此时测头中心与标准球窝的球心相合,如图2所示结构,其精度达到±0.015μm。
校准过程中将标准球窝放置于球棒两端,并使锥窝开口方向同向图2标准球窝支撑尺架安装在球棒姿态调整装置顶部,由主体型材和支撑座构成,可用于对球棒的支撑和夹持,在支撑过程中通常采用艾力点支撑方式,提高标尺的稳定性和精度。
球棒姿态调整装置安装在支撑架顶部(如图3所示)过沿转轴旋转以实现球棒0~90°方向的位置调整,拧紧锁紧把手即可实现固定。
支撑架主要由碳纤维支撑组件、升降组件和抱紧组件如图4所示),其中碳纤维支撑组件和升降组件主体均由碳纤维材质构成,其余连接件由铝合金材质制作,从而保证该架体具有足够的稳定性和轻便型,便于安装运输。
使用过程中松开抱紧组件,可以提起升降组件至指定工作位置,再进行抱紧既可。
之后再通过球棒姿态调整装置调整角度,进行测试。
图4激光对中仪校准装置效果图球窝球棒支撑尺架球棒姿态调整装置支撑架3关节臂示值误差测量结果不确定度分析根据JJF1408-2013规范要求,选用两个标准球棒,短球棒长度L 1=(50~70%)R ,长球棒长度L 2=(120~150%)R 。
对关节臂式坐标测量机在不同的摆放位置下测出球棒的实测长度L i ,每一位置独立重复测量3次,取每个位置的长度测量值L i 与标准球棒中心长度值L cal 之差的最大值作为空间长度示值误差校准结果。
3.1测量重复性引入的不确定度在同一条件下,对关节臂式坐标测量机示值误差进行6次连续测量,得到一个测量列(1050.687,1050.681,1050.685,1050.693,1050.682,1050.688),则重复测量引入的标准偏差为:≈4.4μm 测量中取3次测量的平均值作为测量结果,u 1=S (x )/3√≈2.5μm3.2标准球棒引入的不确定度分量根据溯源的校准证书可以得到,,服从正态分布,取k=2 3.4标准球棒的线胀系数测量误差引入的不确定度标准球棒的材质为殷纲(4J36)材质,3.5合成标准不确定度评估由于各标准不确定度分量互不相关,合成标准不确定度为:3.6扩展不确定度评估取包含概率p=95%,k=2则:3.7不确定度评定主体旋转机构转轴锁紧把手图3球棒姿态调整装置。
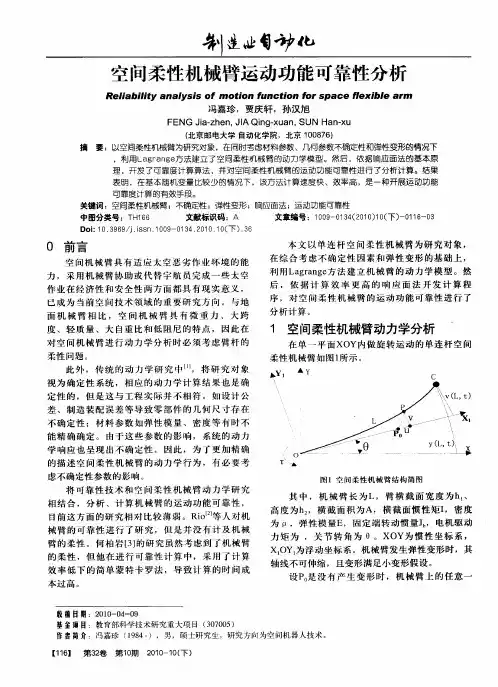
空间站柔性机械臂辅助舱段对接动力学分析危清清;王耀兵;唐自新;张大伟【摘要】Position errors and angle errors exist inevitably in space manipulator system assisted docking of spacecraft. A dynamic and control model concerned the contaction between the docking system was set up to simulate the space manipulator system assisted docking of spacecraft. The impedance control system associated with the detai led joint dynamic model, joint torque control system was bui lt. The results show that the space manipulator system could overcome the initial error of the spacecraft,and finish the job of space assisted docking.The control force turned down immediately after the spacecraft was docked.Also,the space manipulator system could hold the position and shape.%为验证空间站柔性机械臂系统在有初始位置、姿态误差的情况下能否成功完成辅助舱段对接任务,文章建立了空间站柔性机械臂辅助舱段对接动力学模型,模型考虑了对接机构的接触碰撞,依据关节精细动力学模型、力矩控制方法和阻抗控制程序进行了空间柔性机械臂辅助舱段对接过程仿真。