坦克装甲车辆传动装置
- 格式:doc
- 大小:2.91 MB
- 文档页数:118
坦克作为战斗车辆,既不同于火车行驶在轨道上,也不同于汽车行驶在公路上。
它在十分复杂的路面行驶时,遇到沟壑土丘、残垣断壁、水渠田垄等都要跨越而过。
因此,坦克遇到的阻力变化很大,必须在坦克的发动机之后,配上一套增力变速机构,以扩大发动机输出牵引力的变化范围和转速的变化范围。
坦克传动装置安置在发动机与履带推进装置之间,可以说是坦克的“动脉”,它将坦克“心脏”——发动机的动力按传动路线传给主动轮,使坦克前进、倒驶、转向、制动和停车;在发动机扭矩、转速不变时,增大主动轮的扭矩和转速的变化范围,以改变坦克运动时的牵引力。
传动装置由传动箱、主离合器或液力变矩器、变速箱、转向机构、制动器及侧减速器等部件组成。
传动箱用来将发动机的动力传给主离合器或液力变矩器,并增高转速;用电起动发动机时,通过传动箱可增大起动扭矩,使发动机容易起动。
主离合器位于发动机与变速箱之间,通过主、被动摩擦片的摩擦力来传递动力,分离时便于起动发动机和换档,结合时传递发动机扭矩,并借助结合摩滑使坦克平稳起动加速。
液力变矩器是主要以液体动能传递能量的液力式传动部件,可使坦克传动装置有良好的自动适应性。
变速箱用以在较大范围内改变坦克主动轮上的扭矩和转速,实现坦克倒退行驶和切断动力。
转向机构是控制坦克行驶方向的部件。
制动器是利用摩擦来吸收坦克动能的部件,通过控制摩擦力矩使坦克减速或停车。
侧减速器是直接与主动轮相联的末端减速机构,用以增大主动轮上的扭矩和降低其转速,以增大推动坦克前进的牵引力。
传动装置按传递动力的介质,可分为机械、液体和电力传动装置三大类。
目前世界各国主战坦克采用的传动装置有两大类,第一种类型是机械传动装置,它是依靠机械元件传递动力的传动装置。
如俄罗斯T-72和T-80系列主战坦克等就采用了这种传动装置。
其中,T-72坦克的机械传动装置有7个前进档和1个倒档,一档的最大车速为7.32千米/小时,二档为13.59千米/小时,三档为17.16千米/小时。
坦克的“脉动”——坦克装甲车辆动力传动装置发展新动向(中)作者:张文超来源:《坦克装甲车辆》 2015年第5期★张文超传动技术多元化发展从目前来看,液力机械综合传动技术成熟,已成为坦克装甲车辆的主流传动装置,当前及今后一段时间仍将得到广泛应用和发展;液压机械传动技术取得重大突破,已应用到日本最新型10式主战坦克上,可以预测国外未来将加大研究力度,该技术有望得到进一步发展;混合电驱动技术近年来发展活跃,技术水平不断提高,其中机电复合传动成为混合电驱动技术的近期发展方向;双态逻辑传动装置、无限变速式机械无级变速器等新型传动技术已获得突破,并有产品推出,有望用于坦克装甲车辆。
液力机械综合传动技术仍将得到广泛应用和发展液力机械传动经过较长时间的发展和改进,技术上已经比较成熟,与其他传动技术相比,具有传递功率较大、功率密度大等独特的优势,性能上可较好地满足坦克装甲车辆使用要求,因此,液力机械传动具有较强的技术生命力。
当前,国外坦克装甲车辆大都采用液力机械综合传动装置,美国陆军下一代战车——GCV(地面战车)也将阿里逊公司的Xll00液力机械传动装置作为候选传动方案。
目前来看,液力机械综合传动装置的单位功率最大达到1 000~1 200千瓦/立方米,吨功率为420~630千瓦/吨,传递功率能够满足当前880~1 103千瓦大功率发动机的需求。
此外,液力机械综合传动装置的可靠性、系列化程度以及信息化程度也得到大幅提高。
液压机械传动技术取得重大突破液压机械传动既可达到无级传动的理想效果,又可大大提高传动效率以及降低对大功率液压元件的需求,因此,国外非常重视液压机械传动技术研究。
美国已推出HMPT系列液压机械传动装置,但是传递功率较小,只在“布雷德利”步兵战车和韩国K-21步兵战车上得到了应用。
随着液压机械式无级自动变速器在日本10式坦克的成功应用,标志着液压机械传动技术研究取得重大突破。
该自动变速器采用了液压泵和行星齿轮的组合方式。

装甲保姆——以色列“雌虎”重型装甲车(三)作者:王征来源:《坦克装甲车辆》 2014年第3期★王征武装的“保姆”由于作战任务从攻坚矛头改为“装甲保姆”,“雌虎”MK1拆除了“梅卡瓦”1的炮塔和105毫米主炮,其主要武器改为安装在顶置武器站上(早期型号仅有遥控机枪,火力较为单薄)可替换性很强、可方便更换的30毫米机关炮、12.7毫米重机枪、40毫米榴弹发射器、反坦克导弹等武器。
为了节省开发成本,“雌虎”的作战系统(火控系统、作战指挥/战场管理系统、车载数据链系统、车长独立热成像仪等)非常先进,其火控系统直接移植“梅卡瓦”4的“骑士”火控系统,具备全天候作战能力。
其火控系统软件中仍然保留了“梅卡瓦”4主战坦克先进的“猎歼”射击模式。
依托该系统,车长和武器系统操作员可以控制车载直射武器(12.7毫米高射机枪或40毫米榴弹发射器等),在打击当前目标的同时跟踪下一个目标,大大缩短了武器系统的反应速度,从而使“雌虎”具有极强的应变能力和极高的反应速度。
车顶安装的卡特拉尼特(Katlanit)武器站是2005年以色列国防军从拉法尔公司(Rafael)订购的,当时的要求是能够使用7.62毫米和12.7毫米武器,但随后使用过程中发现其通用性较好,能够方便地安装其他轻武器,极大地扩展了任务弹性,该武器站可以通过外部平台自动控制,如传感器、战场管理系统和观察系统。
而在该武器站的最新改进中,其指挥中心可以通过光纤控制武器站,通常1个指挥中心可以控制4个武器站,这一特性使得该武器站不但适用于坦克装甲车辆,而且适用于无人边境值班系统,从而减轻巡逻队的压力。
在以色列边界,目前共安设了43个这种无人武器站,用于代替边境火力点和岗哨。
“雌虎”MK1上“不可替换”的武器是顶置武器站左侧安装的l挺7.62毫米MAG58机枪(而不是以色列近些年广泛装备的“内格夫”(Negev) 5.56毫米轻机枪),也可以安装以色列坦克装甲车辆的最爱——60毫米迫击炮。
用技术传递“力量”——国外坦克传动技术最新发展报告作者:沈蓉孙金奎张秀丽来源:《坦克装甲车辆》 2014年第17期沈蓉孙金奎张秀丽传动系统是坦克装甲车辆的关键组成部分,其作用是将动力装置的驱动功率传递给行动装置,改变行驶速度和牵引力,同时具有转向、制动等功能,对车辆机动性能的发挥具有重要作用。
坦克装甲车辆传动系统由行星变速机构、泵马达、驱动电机和控制系统等核心部件组成,涉及到机械、电子、控制、信息等技术,是复杂的机电液产品,其技术水平和研发能力代表着一个国家整体工业水平的高低。
国外传动技术发展现状液力机械传动仍将广泛应用国外液力机械传动技术经过较长时间的发展和改进,技术上已经非常成熟,当前已成为地面机动平台的主流传动技术,在今后一段时间内仍将具有独特的优势和强大的生命力。
著名的德国“豹”Ⅱ、法国“勒克莱尔”、美国M1/M1A1、英国“挑战者”等主战坦克的传动装置均采用液力机械综合传动技术。
欧洲动力传动机组采用伦克公司的HSWL295TM综合传动装置,2011年,GDLS团队提出的GCV竞标方案仍采用X1100系列液力机械传动装置。
轮式装甲车辆大量采用液力机械自动变速器(AT),如美国艾里逊公司(Allison)从20世纪70年代后期,所提供的轮式车辆各类传动装置均具有自动变速功能。
德国伦克公司从20世纪80年代开始,所提供的传动装置也都已经具有自动变速功能。
典型产品有美国艾里逊公司WT系列的4800SP、德国采埃夫(ZF)公司Ecomat系列的7HP902S等自动变速器。
机电复合是最重要的发展方向近年来,美国、德国等国均启动了机电复合传动/电传动技术专项技术研究计划。
2001年,美国完成了基于M113的20吨级电传动演示样车的研究;英国QinetiQ公司与联合防务公司、霍尼韦尔公司联合研制了适用于25吨级履带式车辆的E-X机电复合传动装置。
德国伦克公司与磁电机公司联合设计了EMT1100机电复合传动装置。
简析坦克装甲车辆电传动技术全电式战斗车辆的概念始于上世纪80年代,其构想是战斗车辆的主要组成部分——武器、装甲和传动系统全部采用电力方式。
尽管这种构想还没有实现,但是其中某些技术,尤其是电传动技术,已经取得了巨大的进步,并且得到了世界各国的极大关注。
发展历史与现状坦克装甲车辆电传动的发展历史根据其技术水平的变化可以划分成4个时期:第1个时期,坦克装甲车辆问世至第一次世界大战结束时;第2个时期(发展停滞期),1920—1960年,前面两个时期都是发展初期;第3个时期(复兴时期),1960年—1995年;第4个时期(现代发展期)。
发展初期 电传动装置早在第一次世界大战时期就已经达到了实用化。
最早采用电传动的是1917年5月亮相的法国“圣沙蒙”坦克。
该坦克由4缸汽油机带动直流发电机,再驱动左右两个直流电动机,带动履带转动。
“圣沙蒙”大约生产了400辆。
当时,电动机已经开始民用化,电车上就使用了直流电动机。
而且在坦克的动力控制领域,人们也有一种共识——直流电动机控制方式要比机械式变速器控制方式方便得多。
在一战末期, 法国FCM公司成功研制了采用电传动的2C重型坦克,但没有应用于战场。
2C坦克战斗全重达70吨,即使在今天看来也是最重级别的坦克了,其最大速度只有12公里/时。
同一时期,英国、德国、美国等也都分别试制了采用电传动的坦克。
到了二战时期,英国试制T O G 电传动的重型坦克。
同一时期,美国试制的T1E1重型坦克和T23中型坦克,两者都采用了通用电气公司的电传动装置。
其中T23坦克试制了约250辆,但未能用于实战。
德国鲍鲁西博士设计了一种“虎”I(P)重型坦克,重60吨。
德军虽然没有把这种坦克作为制式装备,却在该坦克的基础上研制出了“象”式自行榴弹炮,后者经受住了战火的考验。
二战后期,德国人又研制出了超重型的“鼠”式电传动坦克,战斗全重达188吨!其设计师是著名的费迪南•波尔舍博士。
“鼠”式坦克装备一门128毫米火炮,采用电传动装置。
全电坦克“三部曲”(上)作者:徐志伟来源:《坦克装甲车辆》 2018年第13期全电坦克之梦从坦克诞生之日起,一些坦克设计师便追求以电为动力的坦克设计,特别是电传动坦克的设计。
最早实现电传动的坦克,是法国于1917年研制成功的“圣沙蒙”坦克。
在“圣沙蒙”坦克上,由4缸汽油机带动直流发电机,再驱动左右两个直流电动机,使履带转动。
这种坦克大约生产了400辆,参加了第一次世界大战。
一战末期,法国FCM公司还研制出电传动的2C重型坦克,但未能用于实战。
一战期间,英国、德国、美国也分别试制出几种电传动坦克,但都未能用于实战。
一战过后,乃至二战期间,英国、美国和德国都研制过带有电传动装置的坦克。
其中,最成功的当属纳粹德国研制的“鼠”式超重型坦克。
“鼠”式超重型坦克采用电传动装置,和它的总设计师波尔舍博士热衷于电传动装置有直接关系。
波尔舍博士早年供职于电气公司,1900年便设计出电动汽车,名噪一时。
二战期间,波尔舍参与设计的“鼠”式重型坦克和“象”式(“斐迪南”)坦克歼击车,全都采用电传动装置。
其中,“象”式坦克歼击车推进系统的设计,更是体现了电传动装置的优点,发电机(D)和电动机(F)可以分开布置(靠电缆供应电能),车内的空间利用更为合理。
显然,带有电传动装置的坦克,其动力来源还是传统的内燃机。
由内燃机曲轴带动发动机轴旋转发出电能,再驱动电动机。
这种驱动型式,实际上是混合动力形式,即“内燃机+发电机”的形式,还不是纯电动的。
但它是向全电动驱动过渡的重要一环。
电传动装置的一个重大的缺点是,电机的体积和重量太大。
如“鼠”式超重型坦克,光是发电机和联轴器就有3米多长,占用了大量的车内宝贵空间;再加上造价昂贵,成为制约坦克电传动装置发展的重要原因。
二战过后至今,由于稀土材料(镧、钐、钆等)、永磁电机技术以及电机整流技术的发展,电机(包括发电机和电动机等)的尺寸和体积已经可以成倍地缩小,再加上蓄电池技术(从铅酸蓄电池到锂电池等)的飞跃进步,从而可以为大功率电机装上坦克创造必要的条件。
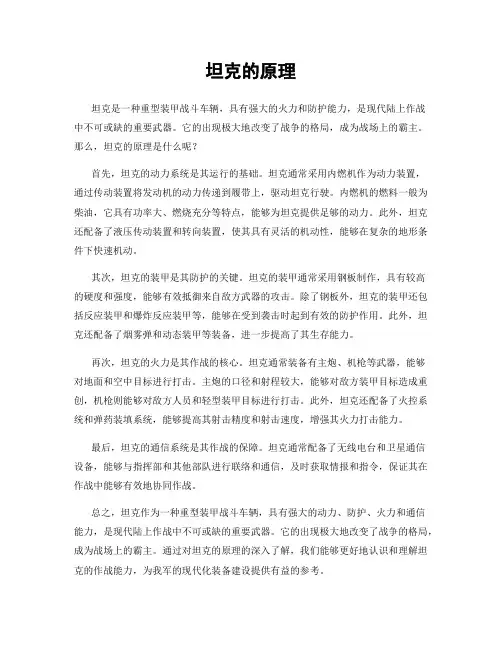
![[原创]坦克双流传动介绍](https://uimg.taocdn.com/c17ea95968eae009581b6bd97f1922791688bec0.webp)
[原创]坦克双流传动介绍上图是M1坦克的变速传动机构图纸,后续的A1,A2改变主要是上装部分。
该机构基本原理广泛用于各国主战坦克。
该机构为零差速双流传动机构(些外还有独立式双流传动,这里不讲),首先说一下正差速、零差速和负差速。
当坦克直线行驶时汇流行星排(不懂的可以先百度补习一下行星齿轮)的太阳轮与齿圈同向转动为正差速,反之为负差速,不动为零差速。
M46坦克用的是正差速。
负差速理论上可行,但结构复杂,稳定性差应用较少。
零差速的具有最好的转向性能,且能实现无级转向(方向盘),并不是说的传动效率高、加速快、倒车快。
发动机输出到该机构的带闭锁的液力变矩器上(图中最上面部分),实现扭矩极巨变化时的匹配,但由于液力变矩器传动效率比较低,为了不损失功率,在正常行驶时闭锁器摩擦片结合,液力变矩器不工作。
这里说一下液力变矩器,他是在液力耦合器的基础上,在涡轮和泵轮(主动的叫泵轮,从动的叫涡轮),加了一个和外壳固定的导向叶轮,也叫控制子或反应器,使其具备一定的变速控制能力,但该能力较弱,只能作为扩展性辅助,后面要有一个有2-4档的变速箱。
还是回到图上,液力耦合器出来后,一路去了变速箱,一路去了风扇离合器(虚线)。
我们只说变速箱这一路(因为风扇干什么的大家都能猜出来-强制散热)。
该变速箱由三个行星排K1、K2、K3两个离合器L1、L2,三个制动器Z1、Z2、Z3组成的变速机构,和一个液压泵、液压控制系统和液压马达组成的转向控制机构组成。
先说变速机构,当结合离合器L1时分别制动Z1、Z2、Z3,实现1档,2档、3档三个传动比的输出,1档时K1工作,K2、K3空转、2档里K2、K3工作、K1空转,3档时只有K3工作,当离合器L1、L2都结合时3个行星机构整体转动,实现4档输出。
当结合L2时分别制动Z1、Z2实现倒1档和倒2档。
该变速箱有4个前进档位和2个倒档。
因此吹什么现代坦克无级变速的可以先停了,不过一些早期的纯液力传动坦克(纯液力转动,控制更简单,一根操纵杆,向前加速,向后倒车,向左车向左,向右车向右,中间停车,但传动效率太低,已经基本淘汰)和新型纯电力传动的不在此例。
高度模块化的“明星”产品——德国新型“山猫”履带式步兵战车作者:张秀丽来源:《坦克装甲车辆》 2016年第19期张秀丽德国莱茵金属公司和克劳斯-玛菲公司联合推出的“美洲狮”步兵战车凭借其先进的设计理念和完美的技术整合成为21世纪履带式步兵战车的典范,但是莱茵金属公司并没有因此放弃对“黄鼠狼”步兵战车的升级改进。
与德国“豹”2坦克在国际市场走俏一样,“黄鼠狼”步兵战车也受到不少国家的青睐。
为了抢占国际市场,融合了“美洲狮”步兵战车部分先进技术的“山猫”(Lynx)步兵战车应运而生。
发展概况早在2012年的萨托利防务展会上,德国莱茵金属公司自筹资金制造的两种“黄鼠狼”步兵战车的改进型就已经公开亮相,其底盘与“山猫”步兵战车基本相同,不过“山猫”采用了脱胎于“美洲狮”的新型动力系统,因此机动性能有很大提升。
莱茵金属公司的升级改进方案采用的是模块化设计,可针对特定用户的特殊需求加装不同的武器站和装甲防护套件。
在升级型的车体上,装有昼/夜摄像机和倒车摄像头,可以为车辆提供全周监视信息,车长、炮长和车辆后部载员舱内的士兵可共享由摄像机拍摄到的视频输入信息。
莱茵金属公司为该车提供了自己研制的ROSY(快速遮盖系统)防护系统,它可以与其它传感器耦合,或者接受其他传感器的提示而触发,快速射出的ROSY榴弹可以有效抵御各种电视、光电、红外、激光制导武器的袭击。
该车还可以安装奥托·梅莱拉公司研制的105毫米低后坐力(LRF)炮塔或者120毫米滑膛炮。
改进型车族的标准配备中,还包括一个辅助动力装置、一个超压CBRN防护包和一台空调设备。
目前,莱茵金属公司正在“黄鼠狼”的基础上大力发展其它一些衍生车型,如防空作战车辆、工程车辆、指挥车辆、救援车辆、后勤保障车辆、救护车辆,以及搜索侦察车和迫击炮车等。
与之相似,“山猫”(Lynx)步兵战车也是采用高度模块化的设计理念,通过整合特殊的任务包,可以转变为具备特定功能的变型车。
坦克的原理坦克是一种重型装甲战斗车辆,具有强大的火力和防护能力,是现代陆上作战中不可或缺的重要武器。
它的出现极大地改变了战争的格局,成为战场上的霸主。
那么,坦克的原理是什么呢?首先,坦克的动力系统是其运行的基础。
坦克通常采用内燃机作为动力装置,通过传动装置将发动机的动力传递到履带上,驱动坦克行驶。
内燃机的燃料一般为柴油,它具有功率大、燃烧充分等特点,能够为坦克提供足够的动力。
此外,坦克还配备了液压传动装置和转向装置,使其具有灵活的机动性,能够在复杂的地形条件下快速机动。
其次,坦克的装甲是其防护的关键。
坦克的装甲通常采用钢板制作,具有较高的硬度和强度,能够有效抵御来自敌方武器的攻击。
除了钢板外,坦克的装甲还包括反应装甲和爆炸反应装甲等,能够在受到袭击时起到有效的防护作用。
此外,坦克还配备了烟雾弹和动态装甲等装备,进一步提高了其生存能力。
再次,坦克的火力是其作战的核心。
坦克通常装备有主炮、机枪等武器,能够对地面和空中目标进行打击。
主炮的口径和射程较大,能够对敌方装甲目标造成重创,机枪则能够对敌方人员和轻型装甲目标进行打击。
此外,坦克还配备了火控系统和弹药装填系统,能够提高其射击精度和射击速度,增强其火力打击能力。
最后,坦克的通信系统是其作战的保障。
坦克通常配备了无线电台和卫星通信设备,能够与指挥部和其他部队进行联络和通信,及时获取情报和指令,保证其在作战中能够有效地协同作战。
总之,坦克作为一种重型装甲战斗车辆,具有强大的动力、防护、火力和通信能力,是现代陆上作战中不可或缺的重要武器。
它的出现极大地改变了战争的格局,成为战场上的霸主。
通过对坦克的原理的深入了解,我们能够更好地认识和理解坦克的作战能力,为我军的现代化装备建设提供有益的参考。
坦克链的工作原理坦克链是一种用于驱动坦克履带的重要装置,它的工作原理是通过将动力源传递给履带上的驱动轮,从而使坦克能够前进、后退以及转向。
本文将详细介绍坦克链的工作原理以及相关的机械结构和传动方式。
一、机械结构坦克链主要由内链、外链和销子等组成。
内链是连接履带板的零件,外链则是将内链与驱动轮和托带轮连接起来的零件。
销子是连接内链与外链的关键部件,它们通过销子的连接使得履带板能够紧密地连接在一起。
二、传动方式1. 正链传动正链传动是最常见的一种传动方式,也是坦克链的主要传动方式。
在正链传动中,内链和外链通过销子连接在一起,当驱动轮转动时,动力会通过链条传递给履带板,从而使坦克能够前进或后退。
2. 反链传动反链传动是一种特殊的传动方式,它与正链传动相反。
在反链传动中,内链和外链的连接方式与正链传动相反,即内链连接驱动轮,外链连接托带轮。
当驱动轮转动时,动力会通过链条传递给托带轮,从而使坦克能够前进或后退。
三、工作原理坦克链的工作原理可以简单概括为:当驱动轮旋转时,动力通过链条传递给履带板,从而产生牵引力,使坦克能够前进、后退或转向。
具体而言,当驱动轮旋转时,它会拉动链条向前或向后运动。
内链和外链之间的销子会沿着驱动轮的轨迹移动,从而使履带板紧密地连接在一起。
同时,托带轮的作用是保持链条的张紧度,使其能够牢固地固定在驱动轮和托带轮上。
通过这种机械结构和传动方式,坦克链能够有效地将动力传递给履带板,从而使坦克能够在不同地形上行驶。
无论是崎岖的山地、泥泞的湿地还是沙漠的沙地,坦克链都能够提供强大的牵引力,使坦克能够稳定地行驶。
总结:坦克链是坦克的重要组成部分,它通过将动力源传递给履带板,使坦克能够前进、后退以及转向。
其工作原理主要包括机械结构和传动方式两个方面。
机械结构由内链、外链和销子等组成,传动方式主要有正链传动和反链传动两种。
通过这种工作原理,坦克链能够在各种地形上提供强大的牵引力,使坦克具备卓越的机动性和适应性。
坦克的“脉动”——坦克装甲车辆动力传动装置发展新动向(下)作者:张文超来源:《坦克装甲车辆》 2016年第7期张文超动力辅助系统发展的关键技术随着坦克装甲车辆推进系统向紧凑化、整体化发展,以及发动机功率密度的不断增加,坦克装甲车辆对动力辅助系统的要求也越来越高。
国外积极开发和不断改进动力辅助系统,以适应先进推进装置的发展要求。
目前,高性能温控调速型冷却风扇、高效紧凑铝板翅式散热器、高温冷却技术、先进空气滤清器等部件技术,以及系统优化匹配技术成为了动力辅助系统发展的关键技术。
系统优化匹配技术随着动力辅助系统结构日趋复杂,其设计不仅要考虑单个部件,而且还要考虑部件之间的相互作用以及车辆结构的影响,从而实现最优设计。
另外,冷却系统的独立设计是未来设计的必然趋势,它虽然名义上是发动机的附件,但与车体紧密相连,在当前动力、传动、辅助系统三位一体的推进装置中作为一个独立的系统进行设计具有突出的优点,从动力、传动部件的总体性能出发,进行系统的统筹,实现匹配的最佳化。
高温冷却技术高温冷却技术是减小辅助系统体积和质量,使柴油机实现高效运行的有效措施。
涉及的技术主要包括高温润滑技术、高低温双循环冷却系统、热管散热技术等。
MTU890系列柴油机的冷却系统即采用了高温冷却技术,使散热器的尺寸大为减小,并允许发动机下游冷却液温度高达130度,提高了发动机的温度均衡能力,减少了流入冷却液的热量,改善了发动机燃烧环境。
冷却风扇及其驱动技术目前坦克装甲车辆用冷却风扇己日趋高转速、小尺寸、多风扇的结构型式。
混流式风扇兼顾轴流风扇和离心风扇的优点,结构紧凑,性能参数的综合指标较高,特别是对排风道的要求比较低,目前应用较广泛。
在风扇驱动技术方面,国外已经研制了多种可调速的风扇驱动装置,其中尤以液压传动较为广泛,风扇温控调速液压传动装置已得到应用。
散热器技术板翅式铝制散热器是散热器发展的主流,特别是散热翅片与传热管整体成型,无接触式的新型低阻散热器,热效率可提高20~30%,重量、体积降低20%。
坦克作为战斗车辆,既不同于火车行驶在轨道上,也不同于汽车行驶在公路上。
它在十分复杂的路面行驶时,遇到沟壑土丘、残垣断壁、水渠田垄等都要跨越而过。
因此,坦克遇到的阻力变化很大,必须在坦克的发动机之后,配上一套增力变速机构,以扩大发动机输出牵引力的变化范围和转速的变化范围。
坦克传动装置安置在发动机与履带推进装置之间,可以说是坦克的“动脉”,它将坦克“心脏”——发动机的动力按传动路线传给主动轮,使坦克前进、倒驶、转向、制动和停车;在发动机扭矩、转速不变时,增大主动轮的扭矩和转速的变化范围,以改变坦克运动时的牵引力。
传动装置由传动箱、主离合器或液力变矩器、变速箱、转向机构、制动器及侧减速器等部件组成。
传动箱用来将发动机的动力传给主离合器或液力变矩器,并增高转速;用电起动发动机时,通过传动箱可增大起动扭矩,使发动机容易起动。
主离合器位于发动机与变速箱之间,通过主、被动摩擦片的摩擦力来传递动力,分离时便于起动发动机和换档,结合时传递发动机扭矩,并借助结合摩滑使坦克平稳起动加速。
液力变矩器是主要以液体动能传递能量的液力式传动部件,可使坦克传动装置有良好的自动适应性。
变速箱用以在较大范围内改变坦克主动轮上的扭矩和转速,实现坦克倒退行驶和切断动力。
转向机构是控制坦克行驶方向的部件。
制动器是利用摩擦来吸收坦克动能的部件,通过控制摩擦力矩使坦克减速或停车。
侧减速器是直接与主动轮相联的末端减速机构,用以增大主动轮上的扭矩和降低其转速,以增大推动坦克前进的牵引力。
传动装置按传递动力的介质,可分为机械、液体和电力传动装置三大类。
目前世界各国主战坦克采用的传动装置有两大类,第一种类型是机械传动装置,它是依靠机械元件传递动力的传动装置。
如俄罗斯T-72和T-80系列主战坦克等就采用了这种传动装置。
其中,T-72坦克的机械传动装置有7个前进档和1个倒档,一档的最大车速为7.32千米/小时,二档为13.59千米/小时,三档为17.16千米/小时。
坦克的结构原理简介:坦克作为一种重型装甲战车,具备强大的火力和防护能力,已成为现代战场上不可或缺的存在。
它的结构原理是由多个关键部件组成的复杂系统,使其能够在各种复杂环境中高效作战。
车体结构:坦克的车体是其最基本的组成部分,承载着其他各个部件。
车体由坚固的装甲板构成,以提供足够的防护能力。
同时,为了增加机动性,车体还配备了履带和悬挂系统,使其能够在不平坦地形上行进。
主炮与副武器:坦克的主要火力来源是其主炮,通常装备有高射速和强大的穿甲能力。
主炮安装在炮塔上,可以360度旋转,使坦克能够灵活瞄准目标。
此外,坦克还配备有副武器,如机枪或反坦克导弹,以对付不同类型的目标。
动力系统:坦克的动力系统通常由内燃机和传动装置组成。
内燃机提供动力,驱动坦克前进。
传动装置将发动机的动力传输到履带上,使坦克能够在各种地形上行驶。
为了提高机动性,一些现代坦克还配备了涡轮增压器和涡轮发动机。
防护系统:为了保护乘员的生命安全,坦克配备了多层防护系统。
装甲板是坦克最外层的防护,可以抵挡来自敌方的火力。
此外,坦克还通过装备反应装甲、爆炸反应装甲和主动防护系统等技术来进一步提高防护能力。
传感器与通信系统:现代坦克还配备了先进的传感器和通信系统,以提高作战效能。
传感器可以探测并跟踪敌方目标,为坦克提供战场情报。
通信系统使坦克能够与指挥部和其他部队实时通讯,协调作战行动。
总结:坦克的结构原理是一个复杂的系统工程,它的各个部件相互配合,使坦克能够在战场上发挥出最大的战斗力。
从车体、火力、动力、防护、传感器到通信系统,每个部分都起着至关重要的作用。
只有通过合理的设计和精确的制造,坦克才能成为战场上的无敌之物,保卫着国家的安全和人民的和平生活。
坦克的组成及作用坦克由坦克武器系统、坦克推进系统、坦克防护系统、坦克通信设备、坦克电气设备及其它特种设备和装置组成。
现代坦克大多是传统车体与单个旋转炮塔的组合体。
按主要部件的安装部位,通常划分为操纵、战斗、动力-传动和行动4个部分。
1)操纵部分操纵部分(驾驶室)通常位于坦克前部,内有操纵机构、检测仪表、驾驶椅等;战斗部分(战斗室)位于坦克中部,一般包括炮塔、炮塔座圈及其下方的车内空间,内有坦克武器、火控系统、通信设备、三防装置、灭火抑爆装置和乘员座椅,炮塔上装有高射机枪、抛射式烟幕装置等;动力传动部分(动力室)通常位于坦克后部,内有发动机及其辅助系统、传动装置及其控制机构、进排气百叶窗等;行动部分位于车体两侧翼板下方,有履带推进装置和悬挂装置等。
在总体布置上,大多数坦克是是驾驶室在前,战斗室居中,动力-传动室在车体后部且发动机纵置。
有的坦克将发动机横置,有的坦克将动力-传动装置布置在车体前部。
坦克乘员多为4人,分别担负指挥、射击、装弹、驾驶等任务。
有些坦克采用了坦克炮自动装弹机,这样就不需要装填手,通常为3名乘员。
2)武器系统主武器多采用120mm或125mm口径的高压滑膛炮。
炮弹基数一般为40~50发,主要弹种有尾翼稳定的长杆式脱壳穿甲弹和多用途弹。
脱壳穿甲弹采用高密度的钨合金或贫铀合金弹芯,初速达1650~1800m/s,在通常的射击距离内,可击穿500余mm厚的均质钢装甲。
多用途弹对钢质装甲的破甲深度可达600mm左右,而且兼备杀伤爆破弹功能。
各种炮弹多采用带钢底托的半可燃药筒。
有的坦克炮有自动装弹机,有的坦克炮可发射反坦克导弹(也称炮射导弹)。
辅助武器多采用7.62mm并列机枪、12.7mm或7.62mm高射机枪,有的装有榴弹发射器。
现代坦克普遍装备了以电子计算机为中心的火控系统,包括数字式火控计算机及各种传感器、炮长和车长瞄准镜、激光测距仪、微光夜视仪或热像仪、火炮双向稳定器和瞄准线稳定装置、车长和炮长控制装置等。
坦克前进原理
坦克前进的原理主要是基于内燃机提供动力,通过传动系统将动力传递到坦克的履带或轮子上,从而使坦克前进。
坦克的内燃机是一种燃烧汽油或柴油的发动机,它产生大量的能量,通过传动系统传递到坦克的履带或轮子上。
履带是坦克的主要支撑和推进装置,它通过驱动轮带动自身转动,从而推动坦克前进。
同时,履带还能提供良好的抓地力和机动性,使坦克能够在不同地形中行驶。
除了履带式坦克外,还有一些坦克采用了轮式设计。
轮式坦克的轮子数量和布局都有所不同,但它们的原理基本相同。
轮式坦克的轮子通过轴承连接到车体内,车体内的发动机通过变速器将动力传递到轮子上,从而推动坦克前进。
在坦克行驶过程中,驾驶员需要控制油门和刹车等操作,以保持坦克的速度和方向。
同时,驾驶员还需要注意观察周围环境,确保坦克的安全行驶。
总之,坦克前进的原理是通过内燃机产生能量,通过传动系统将能量传递到履带或轮子上,从而推动坦克前进。
这种设计使坦克具有强大的动力和机动性,能够在不同地形中行驶并执行各种任务。