基于运动补偿的小型无人机云台控制器设计方法_李湘清
- 格式:pdf
- 大小:1.33 MB
- 文档页数:4

小型无人机机载两轴云台设计与实现
杨润;闫开印;马术文
【期刊名称】《自动化与仪器仪表》
【年(卷),期】2014(0)7
【摘要】针对小型无人机功率和载荷有限这一特点,本文设计了一套小型无人机机载两轴云台,采用集成了三轴陀螺仪、三轴加速度计MPU6050作为云台姿态反馈元件,使用互补滤波进行姿态解算。
由于传统小型无人机的云台采用伺服舵机作为驱动电机,舵机内部减速齿轮的回滞误差会导致拍摄画面晃动,因此采用无刷电机直接驱动云台。
为了测试该系统的有效性,通过小型四旋翼挂载该两轴云台拍摄实验,实验结果表明该云台使拍摄画质更加平稳,验证了该系统的有效性。
【总页数】4页(P165-167)
【关键词】云台;互补滤波;MPU6050;无刷电机
【作者】杨润;闫开印;马术文
【作者单位】西南交通大学机械工程学院
【正文语种】中文
【中图分类】U666.121
【相关文献】
1.基于双目视觉的桥梁检测无人机两轴云台设计与实现 [J], 王雨峰
2.无人机机载天线单轴稳定平台设计与实现 [J], 韩松;张晓林
3.小型无人机地面目标跟踪系统机载云台自适应跟踪控制 [J], 辛哲奎;方勇纯;张雪
波
4.面向小型无人机的两轴稳像云台控制系统 [J], 陈彤阳;王向军
5.适用于多旋翼无人机的两轴云台结构设计 [J], 喻伯牙;易华辉;侯羽生;李晓;刘岩因版权原因,仅展示原文概要,查看原文内容请购买。
第33卷 第2期系统工程与电子技术Vol .33 No .22011年2月Systems Engineering and Electronics February 2011文章编号:1001-506X (2011)02-0376-04收稿日期:2010-04-07;修回日期:2010-07-20。
作者简介:李湘清(1983-),男,博士研究生,主要研究方向为视觉导航、目标跟踪与定位。
E -mail :blues kylixq @基于运动补偿的小型无人机云台控制器设计方法李湘清1,孙秀霞1,彭建亮1,周新立2(1.空军工程大学工程学院,陕西西安710038;2.中国人民解放军95214部队,湖南长沙410007) 摘 要:云台安装的摄像机可用于基于视觉的小型无人机目标跟踪与定位。
分析了无人机平移和旋转运动对目标在图像平面成像的影响,推导了机体角速度与云台姿态角速度转换矩阵,设计基于运动补偿的云台控制器将无人机速度和机体角速度引入云台控制器输入,补偿因无人机运动引起的摄像机视线改变,并利用目标在图像平面的位置偏差修正摄像机跟踪误差。
仿真实验表明所设计的云台控制器可提高目标跟踪精度,减少云台抖动。
关键词:运动补偿;云台控制器;无人机;摄像机中图分类号:TP 242.6+2 文献标志码:A DOI :10.3969/j .issn .1001-506X .2011.02.29Motion compensation based gimbal controller design for small UAVLI Xiang -qing 1,S UN Xiu -xia 1,PENG Jian -liang 1,ZH OU Xin -li2(1.Engineering College ,Air Force Engineering University ,X i 'an 710038,China ;2.Unit 95214of the P LA ,Changsha 410007,China ) Abstract :A gimbaled c amera c an be used in vision -based target tracking and geoloc ation on small unmannedaerial vehicles (UAV ).The effect of cam era rotation and t ranslation on t arget 's image movem ent on an imageplane is analyzed ,the transfer m at rix betw een UAV 's body rates and gimbal at titude rates is inferred ,a gim bal cont roller is designed w hich uses UAV 's velocity and body rates as feedback to compensate cam era 's line -of -sigh t change ,and the target 's position on the im age plane is used to correct the gimbal angle error .Simula -tion result s sh ow th at the cont roller can imp rove tracking prec ision and elim inate gim bal vibration .Keywords :motion compensation ;gimbal controller ;unm anned aerial vehicle (UAV );camera0 引 言 小型无人机(unm anned aerial vehicle ,UAV )视觉技术是当前研究热点问题之一,基于视觉的目标跟踪与定位研究中将视觉传感器如摄像机获得的信号作为反馈。
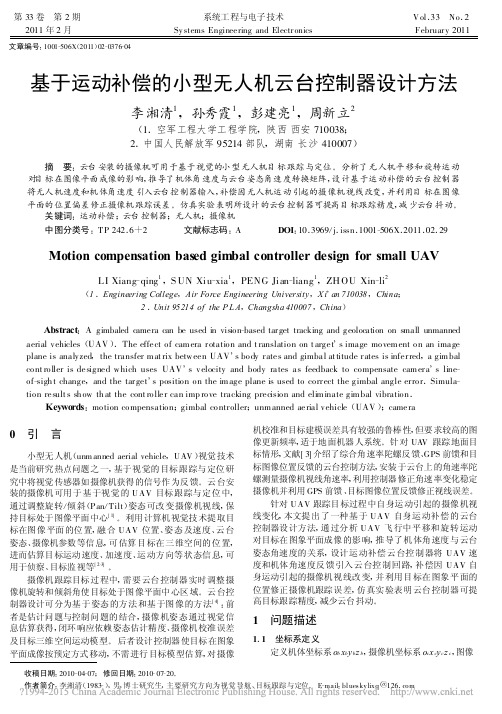
本技术公开了一种基于运动估计和视觉跟踪的云台自动锁定系统和锁定方法,其中,锁定系统包括由数据链路实现通讯的天空端和地面端,其中天空端由变焦相机、三轴云台、云台电机、控制器及编码模块构成,地面端主要包括控制模块,方便操作人员在地面操纵云台相机实现目标跟踪和和精细调整;基于上述自动锁定系统的锁定方法,通过创新的跟踪算法可以自动补偿云台运动造成的目标位置变化,提高了目标位置估计的精度;同时,通过在跟踪算法中设置尺度池,可以自适应跟踪目标的距离变化,无论其在图像中的占比变大还是变小,都可以正确跟踪。
另外,该锁定方法还可以根据目标在图像中的占比自动调节焦距,使其处于合适的大小。
权利要求书1.基于运动估计和视觉跟踪的云台自动锁定系统,其特征在于,包括变焦相机、三轴云台、云台电机、控制器、数据链路、编码模块及控制模块,所述变焦相机、三轴云台、云台电机、控制器及编码模块构成天空端,所述控制模块构成地面端,所述天空端与地面端通过数据链路实现通讯;所述变焦相机安装于三轴云台上,用于拍摄视频数据;所述三轴云台由受控制器控制的云台电机驱动,实现在偏航、横滚、俯仰三个角度上按照控制指令运动;所述编码模块将拍摄到的视频数据进行编码,经由数据链路传输至控制模块;所述控制模块对接受到的视频数据进行解码、还原、运动估计和预处理,跟踪寻找用户框选目标并得出目标在图像中的中心坐标和大小,同时计算出云台电机偏移控制量和变焦控制量,分别传输至控制器和变焦相机。
2.根据权利要求1所述的基于运动估计和视觉跟踪的云台自动锁定系统,其特征在于,所述控制模块包括:解码子模块:将天空端传输回的数据进行解码,还原为RGB格式的图像数据;运动估计子模块:得到预期的目标位置差值;图像数据预处理子模块:将原始图像变换至合适大小,并消除噪点平滑图像;视觉跟踪算法子模块:在图像中获取到目标的位置和大小;云台控制子模块:实现变焦控制,调整变焦镜头。
3.利用权利要求1所述的云台自动锁定系统实现云台自动锁定的方法,其特征在于,包括如下步骤:S1、变焦相机采集视频数据,编码模块对视频数据进行编码后由数据链路传输至地面端的控制模块;S2、解码子模块对接收到的图像数据进行解码,还原为RGB格式的数据图像,显示在人机交互界面上;S3、操作用户在人机交互界面中框选指定的目标,算法逻辑进入跟踪模式,首先通过运动估计模块和图像数据预处理模块对变焦相机传回的图片进行运动估计和图像数据预处理,然后跟踪算法模块逐帧寻找用户框选的目标,获得目标在图像中的中心坐标和大小;S4、云台控制子模块计算出云台电机偏移控制量和变焦控制量,并将数据反馈至控制器驱动云台电机,使变焦相机对准并持续跟踪锁定目标,同时调整变焦相机改变镜头焦距。

轻小型无人机云台机电多目标优化佚名【摘要】轻小型多旋翼无人机云台是一种复杂机电伺服系统,要求兼具轻质量与快响应等机电特性.本文针对传统方法在机电伺服系统中设计的不足,以轻小型多旋翼无人机云台为研究对象,提出一种针对系统带宽的机电多目标优化设计方法.方法中,系统结构部分通过灵敏度分析得到7个尺寸设计参数,并以一阶模态和质量为目标进行优化;系统控制部分以速率环和位置环控制器参数为设计变量,并以上升时间、调节时间和绝对积分误差(Integral Absolute Error,IAE)为目标进行优化.在优化设计中,将近似模型与多目标遗传算法相结合,以降低优化复杂度、并提高优化效率及全局寻优能力.对方法进行仿真分析,结果表明:相比初始结构系统和控制系统模型,采用机电多目标优化设计方法后,结构部分质量降低了8.8%,控制部分IAE型积分误差、调节时间及上升时间等主要性能参数分别降低了54.8%、81.9%和53.4%.最后采用锤击法对云台结构进行模态实验,实验得到的一阶模态频率与优化结果的误差为13.4%.说明提出方法可有效实现云台系统机电总体多目标优化.【期刊名称】《光学精密工程》【年(卷),期】2018(026)011【总页数】10页(P2754-2763)【关键词】轻小型云台;机电多目标优化;近似模型;带宽【正文语种】中文【中图分类】TP394.1;TH691.91 引言轻小型多旋翼无人机因其获取影像机动灵活、影像分辨率高、成本低等优点,成为传统航空摄影测量手段的有效补充,目前已在测绘地理信息、防灾减灾、反恐维稳、农业估产、水电工程、公路勘探等军民重要领域得到了广泛应用[1]。
轻小型多旋翼无人机航摄系统中,云台系统作为关键设备之一,承受并稳定成像载荷,通过实时伺服控制,有效隔离无人机载体内外的各种扰动,保证成像载荷视轴准确跟踪目标,并有效避免了成像载荷抖动造成的成像质量退化[2-4]。
轻小型无人机云台由结构和控制两个子系统组成,进行机电系统多目标联合优化设计时,需要考虑两个子系统之间的耦合关系。

无人机云台控制系统的设计与实现自从电子技术飞速发展以来,人类的生活变得越来越高效和方便。
特别是近年来,无人机技术的快速发展,加速了人们对高空拍摄、物流配送等方面的追求和实现。
然而,在实际操作中,无人机的飞行稳定性和姿态控制效果也面临巨大的挑战。
为了解决这一问题,无人机云台控制系统的设计与实现尤为重要。
一、无人机云台控制系统的意义与应用无人机云台控制系统是一种能够实现云台稳定、精确控制无人机姿态的装置。
基于图像处理系统,该系统的原理是实时获取无人机云台传感器数据,并按照所需的姿态角度进行调整,自动控制云台高度、方向和视线。
这样,无人机在在高空作业过程中,就可以保持更加稳定的状态,提高拍摄、运输和监视等各方面的效率与安全性。
二、无人机云台控制系统的基本组成(1) 控制系统主控芯片: 通常采用fpga或smo等高性能处理器,可实现精准控制和高速数据处理。
(2) 控制算法: 云台运动控制的核心,是实现无人机精准姿态控制的基本方法和步骤。
(3) 传感器: 主要包括陀螺仪、加速度计、磁力计和气压计等,可检测无人机的各项姿态参数。
(4) 云台驱动器: 可实现云台的三维转动,用于控制云台的位移、偏航和俯仰等动作。
(5) 视觉感知网络: 通过图像识别技术,实现无人机的自主导航、自动飞行和避障等功能。
三、无人机云台控制系统的设计与实现(1) 基于飞控系统的控制算法: 根据无人机的飞行动态特性,设计一种能够实现云台精准姿态控制的控制算法,通过全面优化和精密校准,提高控制效率和运行速度。
(2) 数模混合式控制方案: 根据模拟技术和数字技术的不同特点,采用混合式控制方案,实现云台的高精度运动控制和平稳性能。
(3) 高性能云台驱动器: 采用三相平衡电机驱动器和功率电子驱动控制技术,实现高精度云台运动,令其更加可控、高效、稳定。
(4) 反馈控制电路的优化: 结合多种传感器数据,设计全面、精确和实时性的反馈控制电路,能够对无人机云台姿态状态进行精准控制和反馈。
![云台和无人机控制方法、云台及无人机[发明专利]](https://img.taocdn.com/s1/m/27e85913770bf78a642954b1.png)
专利名称:云台和无人机控制方法、云台及无人机专利类型:发明专利
发明人:王映知,刘帅,林光远
申请号:CN201880039246.6
申请日:20180723
公开号:CN110945452A
公开日:
20200331
专利内容由知识产权出版社提供
摘要:一种云台(200)和无人机控制方法、云台(200)及无人机,其中,所述云台控制方法包括:获取当前时刻无人机的姿态和云台(200)的姿态;预测无人机的飞行速度;根据所获取的当前时刻无人机的姿态和云台(200)的姿态、及所预测的无人机的飞行速度,控制云台(200)的转动,以使云台(200)相对无人机的角度位于特定角度范围内;特定角度范围内,无人机的桨组件(400)出现在云台(200)上的拍摄装置(300)的拍摄画面的画面比例低于预设比例阈值。
利用该方法,能够控制云台(200)相对机身的角度在特定角度范围内,确保了桨组件(400)在拍摄画面中的画面比例较小或拍摄画面中不存在桨组件(400),确保了拍摄画面的可用;当无人机悬停或者飞行速度较小时,能够确保拍摄画面的平稳性。
申请人:深圳市大疆创新科技有限公司
地址:518057 广东省深圳市南山区高新区南区粤兴一道9号香港科大深圳产学研大楼6楼
国籍:CN
代理机构:北京博思佳知识产权代理有限公司
代理人:艾佳
更多信息请下载全文后查看。
有感FOC无刷直流电机驱动技术的三轴增稳云台研究黎泽宇;张祺【摘要】本文针对三轴增稳云台对所搭载负载变动的适应性问题,研究了一种基于有感磁场定向控制(FOC)的无刷直流电机驱动的三轴增稳云台控制方法.首先根据无刷直流电机的参数,建立FOC转矩控制模型.在此基础上,结合MEMS惯性传感器和姿态解算,研究了一种可适应多种不同负载的增稳云台控制方法.实验研究结果表明,这种控制方法能够在一定范围内适应多种不同的负载,鲁棒性强.【期刊名称】《电子世界》【年(卷),期】2018(000)004【总页数】4页(P49-52)【关键词】三轴增稳云台;FOC;直流无刷电机;姿态解算【作者】黎泽宇;张祺【作者单位】广东工业大学自动化学院;广东工业大学自动化学院【正文语种】中文1.引言三轴增稳云台是一种为实现目标物体姿态稳定控制的装置,应用增稳云台可以使摄像者在运动的过程中也可以轻松地拍摄出平稳流畅的视频画面。
增稳云台亦可以应用于商业航拍、空中摄影、空中巡航监视、安防等对视频画面质量要求较高的领域中[1],以保持拍摄画面的清晰与稳定。
文献[2-6]中介绍了采用了舵机、步进电机等作为云台的传动机构的方法,这些传统的执行机构大多采用开环结构,仅能在一定程度上实现云台的姿态位置补偿,消振能力极为有限,对变动负载的适应性不强,无法满足高响应度和大扭矩输出的能力[7],转动噪音大,极大地影响了拍摄效果。
采用高精度的非接触式编码器作为电机的位置反馈,结合磁场定向控制策略(FOC),无刷直流电机可实现高精度、高响应、大转矩的输出,转矩脉动小,转动平滑,噪音小,非常适合作为增稳云台的传动执行机构。
2.有感FOC无刷直流电机控制2.1 磁场定向控制的电磁转矩数学模型磁场定向控制(FOC),有时也称为矢量控制。
在电机内部,定子电流产生旋转的磁铁矢量,并以相同的旋转速度带动转子同步旋转。
从这个角度观察电机,定子电流就像是一个常量一样,并且旋转磁通矢量是静止的。
第33卷 第2期系统工程与电子技术Vol .33 No .22011年2月Systems Engineering and Electronics February 2011文章编号:1001-506X (2011)02-0376-04收稿日期:2010-04-07;修回日期:2010-07-20。
作者简介:李湘清(1983-),男,博士研究生,主要研究方向为视觉导航、目标跟踪与定位。
E -mail :blues kylixq @基于运动补偿的小型无人机云台控制器设计方法李湘清1,孙秀霞1,彭建亮1,周新立2(1.空军工程大学工程学院,陕西西安710038;2.中国人民解放军95214部队,湖南长沙410007) 摘 要:云台安装的摄像机可用于基于视觉的小型无人机目标跟踪与定位。
分析了无人机平移和旋转运动对目标在图像平面成像的影响,推导了机体角速度与云台姿态角速度转换矩阵,设计基于运动补偿的云台控制器将无人机速度和机体角速度引入云台控制器输入,补偿因无人机运动引起的摄像机视线改变,并利用目标在图像平面的位置偏差修正摄像机跟踪误差。
仿真实验表明所设计的云台控制器可提高目标跟踪精度,减少云台抖动。
关键词:运动补偿;云台控制器;无人机;摄像机中图分类号:TP 242.6+2 文献标志码:A DOI :10.3969/j .issn .1001-506X .2011.02.29Motion compensation based gimbal controller design for small UAVLI Xiang -qing 1,S UN Xiu -xia 1,PENG Jian -liang 1,ZH OU Xin -li2(1.Engineering College ,Air Force Engineering University ,X i 'an 710038,China ;2.Unit 95214of the P LA ,Changsha 410007,China ) Abstract :A gimbaled c amera c an be used in vision -based target tracking and geoloc ation on small unmannedaerial vehicles (UAV ).The effect of cam era rotation and t ranslation on t arget 's image movem ent on an imageplane is analyzed ,the transfer m at rix betw een UAV 's body rates and gimbal at titude rates is inferred ,a gim bal cont roller is designed w hich uses UAV 's velocity and body rates as feedback to compensate cam era 's line -of -sigh t change ,and the target 's position on the im age plane is used to correct the gimbal angle error .Simula -tion result s sh ow th at the cont roller can imp rove tracking prec ision and elim inate gim bal vibration .Keywords :motion compensation ;gimbal controller ;unm anned aerial vehicle (UAV );camera0 引 言 小型无人机(unm anned aerial vehicle ,UAV )视觉技术是当前研究热点问题之一,基于视觉的目标跟踪与定位研究中将视觉传感器如摄像机获得的信号作为反馈。
云台安装的摄像机可用于基于视觉的UAV 目标跟踪与定位中,通过调整旋转/倾斜(Pan /Tilt )姿态可改变摄像机视线,保持目标处于图像平面中心[1]。
利用计算机视觉技术提取目标在图像平面的位置,融合UAV 位置、姿态及速度、云台姿态、摄像机参数等信息,可估算目标在三维空间的位置,进而估算目标运动速度、加速度、运动方向等状态信息,可用于侦察、目标监视等[2-3]。
摄像机跟踪目标过程中,需要云台控制器实时调整摄像机旋转和倾斜角使目标处于图像平面中心区域。
云台控制器设计可分为基于姿态的方法和基于图像的方法[4]:前者是估计问题与控制问题的结合,摄像机姿态通过视觉信息估算获得,闭环响应依赖姿态估计精度、摄像机校准误差及目标三维空间运动模型。
后者设计控制器使目标在图象平面成像按预定方式移动,不需进行目标模型估算,对摄像机校准和目标建模误差具有较强的鲁棒性,但要求较高的图像更新频率,适于地面机器人系统。
针对UA V 跟踪地面目标情形,文献[3]介绍了综合角速率陀螺反馈、GPS 前馈和目标图像位置反馈的云台控制方法,安装于云台上的角速率陀螺测量摄像机视线角速率,利用控制器修正角速率变化稳定摄像机并利用GPS 前馈、目标图像位置反馈修正视线误差。
针对UAV 跟踪目标过程中自身运动引起的摄像机视线变化,本文提出了一种基于UAV 自身运动补偿的云台控制器设计方法,通过分析UAV 飞行中平移和旋转运动对目标在图象平面成像的影响,推导了机体角速度与云台姿态角速度的关系,设计运动补偿云台控制器将UAV 速度和机体角速度反馈引入云台控制回路,补偿因UAV 自身运动引起的摄像机视线改变,并利用目标在图象平面的位置修正摄像机跟踪误差,仿真实验表明云台控制器可提高目标跟踪精度,减少云台抖动。
1 问题描述1.1 坐标系定义定义机体坐标系o b x b y b z b ,摄像机坐标系o c x c y c z c ,图像 · 第2期李湘清等:基于运动补偿的小型无人机云台控制器设计方法·377 ·系统工程与电子技术第33卷 ·378 · 第2期李湘清等:基于运动补偿的小型无人机云台控制器设计方法·379 上述仿真实验可看出,P I-NZS P云台控制器引入UAV速度与角速度补偿后,减小了连续目标跟踪过程中图象处理延迟、UAV航向变化及滚转角抖动等因素对摄像机目标跟踪的影响,云台俯仰、倾斜角度为连续变化,同时提高了跟踪精度。
4 结 论本文提出了一种基于运动补偿的摄像机云台控制器设计方法,设计了PI-NZSP云台控制器抵消目标跟踪过程中UAV自身运动对于摄像机视线的影响,仿真表明这一控制器一方面减少了目标跟踪过程中摄像机抖动,目标跟踪过程中云台平稳转动使摄像机图像清晰,有利于图像处理及目标检测,另一方面提高了目标跟踪精度,目标与图像平面中心的偏差减小。
参考文献:[1]Campbell M,Wheeler M.A vision based geol ocation tracking systemfor UAVs[C]∥Proc.of AIAA Guidance,Navigation,and ControlConference and Exhibit,2006.[2]C ampbell M,Whitacre W.C ooperative tracking using vision meas-urements on seascan UAVs[J].IEEE Trans.on Control System sT echnology,2007,15(4):613-626.[3]Wheeler M,Wis e R,Rysdyk R,et a l.Autonomous c ooperative geo-l ocation and coordinated tracking of moving targets[C]∥Proc.ofAIAA Infortech and Aeros pac e Conference and Exhibit,2007.[4]H amel T,Mahon y R.Image based visua l servo con trol for aclass of aerial robotic systems[J].J ou rnal of Automatica,2007,43(1):1975-1983.[5]Cra w ford B.Design and evalua tion o f an autonomous,obstacleavoiding,f ligh t control system using visual sensors[D].US A:University o f K ansas,2004.[6]丁卫.基于超小型无人机的地面目标实时图像跟踪[D].上海:上海大学,2007.(Ding W.Rea l time video tr ackin g the groundobject f rom a subminia ture unmanned aer ia l vehicle[D].S hang hai:S hang hai University,2007.)[7]U y-Loi L.Stability and control of flight vehicle[M].Wash ing-ton:University o f Wash ing ton,1997.[8]Li Z Y,Dobrokhodov V,X ar gay E,et al.Developmentand imple-mentation o f L1gimbal tracking l oop lnboard o f s mall U AV[C]∥Proc.of AIAA Guidan ce,Navigation,and Con trolConference,2009.[9]Wang I,Dobr okhodov V,Kaminer I I,et a l.On vision-basedtar get tracking and r ange estimation for small UA Vs[C]∥Proc.of AIAA Guidance,Navigation,and Control C onferenceand Exhibit,2005.[10]Dobr okhodov V,Kaminer I,Jones K.Vision-bas ed tracking andmotion estimation for moving targets using small UAVS[C]∥Proc.of AIAA Guidance,Navigation,and Control C onferenceand Exhibit,2006.[11]Ma L L,Cao C Y,Hovakimyan N,et al.Ad ap tive v ision-based guid ance la w with g uaranteed per formance bounds[J].J ou rnal of Guidance,C on trol,and Dynamics,2010,33(3):834-852.。