无人机三轴稳定云台智能控制算法的研究
- 格式:pdf
- 大小:2.39 MB
- 文档页数:55
三轴稳定卫星姿态控制算法研究共3篇三轴稳定卫星姿态控制算法研究1三轴稳定卫星姿态控制算法研究在卫星的运行过程中,姿态控制技术一直是关键技术之一。
卫星的三轴稳定姿态控制算法,是卫星姿态控制领域中的经典问题之一。
三轴稳定卫星的姿态控制需要同时控制三个轴向的角速度,以保持卫星的稳定运行,确保其执行任务的精确性和安全性。
在本文中,我们将对三轴稳定卫星姿态控制算法进行研究,并提出一种优化算法。
三轴稳定卫星姿态控制的基本问题是什么?三轴稳定卫星姿态控制中的基本问题是,如何使卫星保持稳定的姿态运行,以完成其所需的任务。
在此过程中,需要控制卫星的角速度,从而保持其稳定的旋转。
三轴稳定卫星姿态控制的关键点是合理地选择合适的姿态控制算法。
三轴稳定卫星姿态控制算法的分类目前,三轴稳定卫星姿态控制算法可以分为三个主要类型:基于PID控制器的算法、基于模型预测控制的算法和基于滑模控制的算法。
(1)基于PID控制器的算法PID控制器是最常用的一个控制器,在三轴稳定卫星姿态控制中也广泛使用。
PID控制器能够通过反馈调节卫星的角速度,使其保持稳定的姿态,从而确保其可以按照既定的轨道执行任务。
PID控制器的控制过程包括三个部分:比例积分微分控制。
其中,比例控制器能够根据误差的大小对卫星的角速度进行反馈控制,积分控制器可以根据误差积分值对误差进行修正,微分控制器则可以根据误差的变化率对误差进行修正,在三个部分协同下,PID控制器可以实现对卫星姿态的稳定控制。
(2)基于模型预测控制的算法基于模型预测控制的算法可以减少姿态控制的误差,并更加精准、快速地控制卫星的姿态。
这种方法将卫星的角速度和姿态动力学模型等信息融合在一起,通过预测卫星的姿态变化并提前作出反应,从而实现更加准确的实时控制。
(3)基于滑模控制的算法基于滑模控制的算法以非线性控制为基础,具有较好的鲁棒性和追踪性。
滑模控制算法通过滑模面的设计,把控制量与状态变量分离,使其具备独立控制性质。
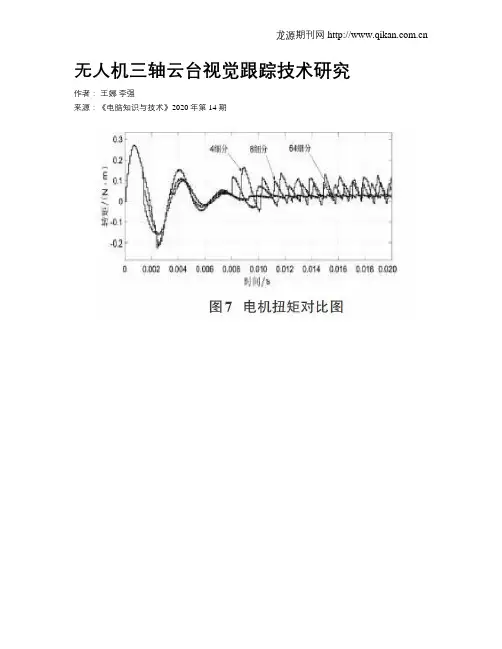
无人机三轴云台视觉跟踪技术研究作者:王娜李强来源:《电脑知识与技术》2020年第14期摘要:无人机在执行跟踪或者拍摄任务时容易由于外界扰动和自身机械震动而产生视觉偏离,搭载云台的无人机需要克服运动状态下的载体方位、俯仰方位、横摆方位的干扰,在获取图像后还需要对目标进行光电耦合。
本设计选用STM32103Z作为四旋翼无人机的三轴控制器,运用细分驱动算法对电机进行精准控制,采用ARM15作为图像处理模块,对摄像头获取的目标图像进行滤波、光电耦合、特征对比,采用高精度陀螺仪采集角度及加速度信息,搭建了一套四旋翼无人机云台控制的闭环系统,减小了搭载摄像机的云台及激光发射器在目标锁定过程中的惯性位移偏差。
系统实现了四旋翼无人机在进行目标跟踪及拍摄过程中的稳定飞行。
关键词:四旋翼无人机;STM32103Z;ARMl5;细分驱动算法;闭环控制系统中图分类号:TP311 文献标识码:A文章编号:1009-3044(2020)14-0038-03隨着无人机技术的快速发展及广泛应用,无人机搭载的任务载荷系统呈现向智能化、高精度化、多样化方面发展,无人机视觉跟踪及拍摄系统应用于各个领域中。
由于执行飞行任务的无人机稳定性差干扰因素众多,研发一款稳定精准的目标锁定及自动跟踪的无人机已经迫在眉睫,本设计选用四旋翼无人机作为控制云台的载体,用STM32103Z实现无人机电机的角度控制及陀螺仪的输入输出信号处理,用ARMl5进行目标图像处理,以此搭建一个闭环的云台控制系统来实现无人机的视觉跟踪及拍摄任务。
该系统需要克服飞行过程中载体的各种振动、颠簸、光照变化等干扰,保证搭载在云台上的高清摄像头能在干扰力的作用下实现自我调整,保证高质量地完成跟踪及拍摄任务。
1控制系统的总体设计方案1.1云台电机控制系统设计云台的结构方式取决于四旋翼的运动方式,四旋翼运动可以用横摆角、俯仰角、偏航角来描述,因此云台的结构采用横摆一俯仰一偏航三轴式设计,其中每一轴对应一个闭环控制系统,如图1所示,陀螺仪是利用高速回转体的动量矩敏感壳体相对于惯性空间绕正交于自转轴的一个或两个轴的角运动监测装置,可以精准地提供无人机的方向和位置信号,加速度计可以提供无人机的加速度信号。
无人机三轴稳定云台的模糊PID控制郭炳坤,陈水利,吴云东,李渭(集美大学理学院,福建厦门 361021)[摘要]以无人机三轴稳定云台的内框作为研究对象,将自适应卡尔曼滤波算法与模糊PID控制算法相结合,提出了一种基于自适应卡尔曼滤波的模糊PID控制算法.经过Matlab仿真实验表明,相对于经典PID控制算法和模糊PID控制算法而言,该算法在无人机三轴稳定云台的控制上,不仅响应速度快、精度高,而且对控制干扰噪声和测量噪声也起到了较好的抑制作用.[关键词]无人机;三轴云台;自适应控制;模糊PID;模糊规则;自适应卡尔曼滤波Fuzzy-PID Control for UAV Three-axis Stable Pan-tiltGUO Bing-kun,CHEN Shui-li,WU Yun-dong,LI Wei(School of Science,Jimei University,Xiamen 361021,China)Abstract:With its research focus on the inner frame of UAV three-axis stable pan-tilt,combining the adaptive Kalman filter algorithm and the fuzzy PID control algorithm,the fuzzy PID control algorithm based on adaptive Kalman filter was presented.Through the simulation using Matlab,the results show that this algorithm have an more advantage than the classical PID control algorithm and fuzzy PID control algorithm in UAV three-axis stable pan-tilt.It has fast response and high precision.The system also has a good inhibitory effect on control interference noise and measure noise.Key words:UAV;three-axis pan-tilt;self-adaptive control;fuzzy-PID;fuzzy rule;Adaptive Kalman filter。
三轴云台原理
三轴云台作为一种常见的摄影设备,其原理是基于三个轴向的稳定控制,可以实现对相机的稳定控制,从而拍摄出更加清晰、稳定的影像。
三轴云台主要包括俯仰轴、横滚轴和偏航轴,下面我们将逐一介绍三轴云台的原理。
首先是俯仰轴,俯仰轴是指相机在垂直方向上的旋转控制。
通过俯仰轴的稳定控制,可以确保相机在上下移动时保持稳定,避免因为相机晃动而导致拍摄画面模糊。
俯仰轴一般采用电机和陀螺仪进行控制,当相机发生上下晃动时,电机会根据陀螺仪的信号进行调整,从而保持相机的稳定。
其次是横滚轴,横滚轴是指相机在水平方向上的旋转控制。
通过横滚轴的稳定控制,可以确保相机在左右移动时保持稳定,避免因为相机晃动而导致拍摄画面晃动。
横滚轴的原理与俯仰轴类似,同样采用电机和陀螺仪进行控制,保持相机的水平稳定。
最后是偏航轴,偏航轴是指相机在水平面上的旋转控制。
通过偏航轴的稳定控制,可以确保相机在水平面上的旋转时保持稳定,避免因为相机晃动而导致拍摄画面歪斜。
偏航轴同样采用电机和陀螺仪进行控制,保持相机在水平面上的稳定。
综上所述,三轴云台的原理是通过对俯仰轴、横滚轴和偏航轴的稳定控制,实现对相机的稳定控制,从而拍摄出更加清晰、稳定的影像。
三轴云台在航拍、摄影等领域有着广泛的应用,可以大大提升影像的质量和稳定性,为摄影师和影视制作人员带来了极大的便利。
希望通过本文的介绍,读者对三轴云台的原理有了更加清晰的认识,能够更好地理解和应用三轴云台这一摄影设备。

收稿日期:2020-05-23基金项目:辽宁省教育厅项目(项目编号:JYT19001)作者简介:林峰(1963-),男,辽宁沈阳人,教授,博士,主要研究方向:自主飞行控制,E mail:lfshenyang163@163 com。
檪檪檪檪檪檪檪檪檪檪檪檪檪檪檪檪殏殏殏殏信息科学与工程 文章编号:2095-1248(2021)01-0047-07机载三轴云台的ESO_LQR复合控制方法林 峰,马翰廷,卢艳军(沈阳航空航天大学自动化学院,沈阳110136)摘要:针对机载三轴云台在工作时受多种复杂情况干扰的影响,传统的线性二次型调节器(LQR)可能无法快速隔离扰动从而导致系统鲁棒性变差的问题,提出扩张状态观测器(ESO)_LQR复合控制策略,通过ESO实时观测估计云台电机转轴上的非线性扰动并对其进行补偿以提高LQR姿态角控制器的鲁棒性,提高了机载三轴云台系统的控制品质。
通过仿真验证了该方法可以有效克服无人机机动及云台内部控制器耦合带来的力矩干扰,有效提高了系统的控制质量。
关键词:三轴云台;姿态控制;扩张状态观测器;LQR;抗扰中图分类号:V249 1 文献标志码:Adoi:10.3969/j.issn.2095-1248.2021.01.008ESO_LQRcompositecontrolmethodforairbornethree axisPTZLINFeng,MAHan ting,LUYan jun(SchoolofAutomation,ShenyangAerospaceUniversity,Shenyang110136,China)Abstract:Inordertosolvetheproblemthatthetraditionallinearquadraticregulator(LQR)maynotbeabletoquicklyisolatethedisturbance,whichresultsinthepoorrobustnessoftheairbornethree axisPTZsystem,Anextendedstateobserver(ESO)_LQRcompositecontrolstrategyisproposedtoim provestherobustnessofLQRattitudeanglecontrollerandthecontrolqualityofairbornethree axisPTZsystembyreal timeestimationandcompensationofnonlineardisturbancesonthemotorshaftofthePTZthroughESOobservationThesimulationresultsshowthatthemethodcaneffectivelyovercomethemomentinterferencecausedbyUAVmaneuveringandthecouplingoftheinternalcontrolleroftheplatform,andeffectivelyimprovethecontrolqualityofthesystem.Keywords:three axisPTZ;attitudecontrol;extendedstateobserver;LQR;disturbancerejection 多旋翼无人机目前已广泛用于航空遥感领域,将遥感相机装载在机载三轴增稳云台上可有效抑制无人机机身姿态变化带来的干扰角运动,使相机光轴在空间内保持稳定,消除图像抖动并精准跟踪目标[1]。
三轴云台原理
三轴云台原理是指通过三个轴向的运动来实现云台的稳定控制。
云台是一种用于摄影、航拍等领域的设备,通过控制云台的运动,可以使相机保持稳定,消除震动,从而获得清晰、平稳的影像。
云台的三个轴向分别是俯仰轴、横滚轴和偏航轴。
俯仰轴用于控制相机的上下运动,横滚轴用于控制相机的左右运动,偏航轴用于控制相机的旋转运动。
通过控制这三个轴向的运动,可以实现相机在三维空间内的任意姿态调整。
云台的稳定控制原理是通过陀螺仪和电机的配合实现的。
陀螺仪是用来检测云台的姿态变化的传感器,可以感知设备的旋转角度和加速度。
当相机发生姿态变化时,陀螺仪会检测到相应的信号,并通过控制电机的运动来实现云台的稳定。
在云台中,电机起到了关键的作用。
电机通过转动云台的轴向来调整相机的姿态。
一般来说,云台会采用无刷电机,因为无刷电机具有高效率、低噪音、长寿命等优点。
通过控制电机的转速和方向,可以实现相机姿态的调整。
除了陀螺仪和电机,云台还需要一个控制系统来控制整个过程。
控制系统一般由微处理器、传感器和驱动器等组成。
微处理器负责接收陀螺仪的反馈信号,并根据信号来控制电机的运动。
传感器用于检测云台的工作状态,驱动器用于控制电机的转动。
三轴云台的原理是通过控制俯仰轴、横滚轴和偏航轴的运动,结合陀螺仪、电机和控制系统的配合,实现相机的稳定控制。
云台通过保持相机的稳定性,可以获得清晰、平稳的影像,满足摄影和航拍等领域的需求。
随着技术的不断发展,三轴云台的应用范围也在不断扩大,为我们带来了更多的拍摄可能性。
无人机云台控制技术研究与实现近年来,随着无人机技术的不断发展,无人机已经广泛应用于各个领域。
无人机的使用不仅方便快捷,在一些特殊环境下的应用也表现出了明显的优势。
但是无人机飞行中难免会受到强风、晃动等因素的影响,这就需要无人机飞行过程中的云台控制技术来保证稳定。
本文将介绍无人机云台控制技术的研究与实现。
一、无人机云台控制技术简介无人机云台控制技术是指,在无人机飞行过程中,为了解决航拍稳定问题而采用的云台控制技术。
无人机云台控制技术可以通过电机、驱动器和传感器等设备来完成航拍稳定,可以实现对水平方向、垂直方向的云台控制,让摄像头保持稳定,减少图像抖动,得到更加清晰的图像和视频。
二、无人机云台控制技术的优势1. 可以在风速较大的情况下进行飞行,确保飞行稳定。
2. 可以提高航拍的清晰度和稳定性,获得更加优质的影像和视频。
3. 可以实现自动稳定,减少了人工干预的时间和成本。
三、无人机云台控制技术的研究方向1. 硬件设计和制造:无人机云台控制技术需要一些电机、传感器等硬件设备来实现,因此对于硬件的设计和制造有着很高的要求,需要支持良好的通信协议和强大的性能,保证航拍过程中的稳定性和可靠性。
2. 算法研究以及控制方法的改进:针对不同环境和气象条件下的航拍需求,需要不断研究改进无人机云台控制算法和控制方法,保证控制精度和视觉效果的稳定性。
3. 同步控制技术的应用:无人机云台控制技术需要对摄像头进行同步控制,才能使航拍的效果达到最佳稳定状态,因此同步控制技术也是无人机云台控制技术的重要研究方向之一。
四、无人机云台控制技术的实现无人机云台控制技术的实现需要以下几个关键步骤:1. 选定合适的无人机云台控制设备:需要根据实际需求选定合适的设备,包括电机、驱动器、传感器等。
2. 硬件设计和制造:根据选定的无人机云台控制设备进行硬件设计和制造,在设计过程中需要考虑性能和通信协议等方面的问题,确保设备的可靠性和稳定性。
3. 算法研究和控制方法的改进:需要对无人机云台控制算法和控制方法进行持续的研究和改进,以满足不同的航拍需求和实际应用场景。
三轴稳定平台实验报告三轴稳定平台实验报告引言:三轴稳定平台是一种用于保持相机、望远镜、无人机等设备稳定的装置。
它通过三个轴向的稳定控制,能够抵消外界的震动和晃动,从而保证设备拍摄或观测的稳定性。
本文将介绍我们对三轴稳定平台进行的实验,并讨论实验结果。
实验目的:1. 了解三轴稳定平台的工作原理和结构;2. 掌握三轴稳定平台的操作方法;3. 分析三轴稳定平台在不同环境条件下的稳定性。
实验步骤:1. 搭建三轴稳定平台实验装置;2. 将相机固定在稳定平台上,并调整相机的位置和角度;3. 在不同条件下进行实验拍摄,包括静止、行走、震动等;4. 分析拍摄结果并进行数据处理。
实验结果:通过实验,我们发现三轴稳定平台在各种条件下都表现出了良好的稳定性。
无论是在静止状态下还是在行走过程中,相机都能够保持稳定,拍摄到清晰的画面。
即使在受到外界震动的情况下,稳定平台也能够及时调整,保持相机的稳定性。
实验分析:三轴稳定平台的稳定性主要依赖于其内部的陀螺仪和加速度计。
陀螺仪可以感知设备的旋转角度,而加速度计则可以感知设备的加速度。
通过对这些数据的实时监测和分析,稳定平台能够根据设备的状态进行相应的调整,从而保持设备的稳定。
此外,稳定平台还采用了闭环控制系统,能够根据设备的反馈信息进行实时调整。
当设备受到外界干扰时,稳定平台能够通过控制系统对电机进行精确的控制,从而抵消外界干扰,保持设备的稳定性。
实验总结:三轴稳定平台是一种非常有效的设备稳定装置。
通过实验我们发现,它能够在各种条件下保持设备的稳定,为用户提供清晰、稳定的拍摄或观测体验。
在无人机、航拍、科学研究等领域,三轴稳定平台都有着广泛的应用前景。
然而,三轴稳定平台也存在一些局限性。
首先,它对设备的重量和尺寸有一定的限制,不适用于大型设备的稳定。
其次,稳定平台的价格较高,不适合普通用户。
此外,稳定平台在极端环境下的稳定性还有待改进。
未来,我们希望能够进一步改进三轴稳定平台的性能,提高其稳定性和适用性。
三轴云台方案引言三轴云台是一种用于摄影、航拍等领域的设备,用于稳定摄像机或摄影机。
本文将介绍一种基于电机控制的三轴云台方案,以实现高质量的运动稳定性和摄影效果。
背景在过去,摄影摄像中很难实现稳定的运动,尤其是在行进或不平坦的地面上。
由于摄像机和摄影机的重量以及振动等原因,视频拍摄常常会出现晃动、模糊等问题。
为解决这一难题,三轴云台被广泛应用于摄影领域,通过电机控制实现对摄像机的稳定运动。
设计原理三轴云台方案主要由以下三个轴组成:1.俯仰轴(Pitch Axis):用于控制摄像机的上下运动。
2.横滚轴(Roll Axis):用于控制摄像机的左右运动。
3.偏航轴(Yaw Axis):用于控制摄像机的旋转运动。
每个轴都由一个电机驱动,并通过传感器、控制器等配件实现稳定的运动控制。
该方案通过实时监测摄像机的姿态角度,并通过电机控制系统控制各轴的运动来实现稳定的摄影效果。
硬件实现电机选择选择合适的电机对于三轴云台方案至关重要。
常见的电机选项包括步进电机和无刷直流电机(BLDC)。
步进电机在位置控制方面表现良好,但速度和灵敏度较低,因此在三轴云台中往往选择使用BLDC电机。
传感器和控制器为了实现对摄像机姿态的实时监测,需要使用倾角传感器或陀螺仪等传感器。
这些传感器可以测量摄像机的倾斜角度和旋转角度,并将数据传输到控制器中。
控制器根据传感器数据计算电机的控制信号,从而实现对三个轴的精确控制。
软件实现三轴云台方案的软件实现主要分为两个部分:传感器数据处理和电机控制。
传感器数据处理在接收到传感器数据后,需要对其进行处理,以获得准确的姿态角度。
通过对传感器数据进行滤波、校准和积分等操作,可以获得稳定且无瑕疵的姿态数据。
常见的传感器数据处理算法包括卡尔曼滤波、互补滤波、扩展卡尔曼滤波等。
根据具体的需求和硬件条件,选择合适的算法可以提高姿态角度的精度和稳定性。
电机控制根据传感器数据处理的结果,生成适当的电机控制信号,向电机传递。
中文摘要中文摘要随着小型无人直升机在低空航拍领域的广泛应用,消费者对航拍质量提出了更高的要求。
但无人机飞行姿态受外界气流等因素的干扰,严重影响航拍质量。
本文以三轴机载云台为研究对象,对机载云台的增稳控制进行了深入研究。
本文分析和介绍了机载云台的结构特性和增稳控制的工作原理,分析了三轴机载云台的数学模型,构建了以 Cortex-M3 微控制器为主控芯片、MEMS 运动传感器为云台姿态检测单元、直流无刷电机为执行单元的增稳云台姿态控制系统。
在此基础上讨论了云台姿态解算算法。
在控制算法上,本文提出了将滑模变结构控制算法应用在机载云台的控制系统中,使用扰动观测器预估系统的干扰并补偿。
并在MATLAB的Simulink中搭建仿真模型,通过试验分析了经典PID控制器、线性滑模控制器和非奇异终端滑模控制器的跟踪性能。
综合仿真结果可知,非奇异终端滑模控制器能更好满足三轴机载云台的增稳控制要求。
最后,制作了三轴机载云台的样机,并对云台进行测试。
测试表明,该云台各系统软硬件运行良好,达到了良好的增稳效果。
关键字:机载云台,姿态控制,滑模变结构控制,直流无刷电机- I -AbstractAbstractWith the wide application of small unmanned helicopters in the field of low-altitude aerial photography,consumers have put forward higher requirements for aerial photography quality. However,the flight attitude of the drone is disturbed by factors such as external airflow,which seriously affects the aerial photography quality. In this paper,the three-axis airborne PTZ is taken as the research object, and the stability control of the airborne PTZ is deeply studied.This paper analyzes and introduces the structural characteristics of the airborne platform and the working principle of the stabilization control. It analyzes the mathematical model of the three-axis airborne platform and constructs the Cortex-M3 microcontroller as the main control chip and the MEMS motion sensor. The pan-tilt attitude detection unit and the DC brushless motor are the stabilization and pan/tilt attitude control systems of the execution unit. Based on this,the PTZ attitude solving algorithm is discussed.In the control algorithm,this paper proposes to apply the sliding mode variable structure control algorithm to the control system of airborne pan/tilt, and use the disturbance observer to predict the interference and compensation of the system. The simulation model is built in Simulink of MATLAB. The tracking performance of classical PID controller, linear sliding mode controller and non-singular terminal sliding mode controller is analyzed through experiments. The comprehensive simulation results show that the non-singular terminal sliding mode controller can better meet the stability control requirements of the three-axis airborne pan/tilt.Finally,a prototype of a three-axis airborne head was produced and tested on the gimbal. Tests show that the software and hardware of the PTZ system are running well and have achieved good stability.Keywords: loading airborne, attitude control,sliding mode variable structure control, DC brushless motor目 录目录中文摘要 (I)Abstract (II)第1章绪论 (1)1.1课题背景及研究意义 (1)1.2国内外研究现状分析 (2)1.2.1国外研究现状分析 (2)1.2.2国内研究现状分析 (3)1.2.3三轴机载云台增稳控制方法 (5)1.3 本文主要研究内容 (5)第2章三轴机载结构分析及姿态解算 (7)2.1三轴机载云台结构 (7)2.2机载三轴云台姿态解算研究 (9)2.2.1参考坐标系 (9)2.2.2姿态解算算法选择 (10)2.3姿态角更新 (13)2.4本章小结 (16)第三章三轴机载云台数学建模 (17)3.1三轴机载云台模型 (17)3.1.1三轴机载云台建模 (17)3.2直流电机的线性建模 (18)3.2.1电机的选型分析 (18)3.2.2直流无刷电机的等效电路 (20)3.2.3直流无刷电机基本公式 (21)3.3机载云台各环节模型 (22)3.4 PID控制策略分析 (23)目录3.4.1经典的PID控制 (23)3.4.2机载云台PID仿真 (25)3.5本章小结 (26)第4章三轴机载云台的滑模变结构控制 (27)4.1变结构控制简介 (27)4.1.1变结构及滑模变结构简介 (27)4.1.2滑模变结构控制定义 (28)4.1.3三轴机载云台模型简化 (29)4.2三轴机载云台的线性滑模控制 (29)4.2.1普通线性滑模控制原理 (29)4.2.2线性姿态环滑模控制律的设计 (29)4.2.3收敛性分析 (31)4.3基于非奇异终端滑模变结构姿态环滑模控制器研究 (33)4.3.1非奇异终端滑模控制基本原理 (33)4.3.2非奇异终端滑模控制律的设计 (33)4.3.3收敛性分析 (34)4.4基于观测器的非奇异终端滑模控制算法的改进 (40)4.5本章小结 (42)第五章软硬件设计及样机测试 (43)5.1增稳云台控制器的方案叙述 (43)5.2硬件系统设计 (43)5.2.1主控模块硬件设计 (43)5.2.2运动检测模块设计 (45)5.2.3电机驱动模块设计 (47)5.2软件系统设计 (48)5.3姿态控制算法仿真分析仿真分析 (50)5.3.1阶跃信号仿真及跟踪性能分析 (50)目录5.3.2正弦信号仿真及跟踪性能分析 (52)5.3.3基于干扰观测器非奇异终端滑模控制器性能分析 (53)5.4样机及测试结果 (54)5.5本章小结 (55)第六章结论 (56)参考文献 (58)致谢 (64)独创性声明 (66)第1章 绪论第1章绪论1.1课题背景及研究意义目前,低空领域的航拍技术在很多领域都有重要的应用,比如高层建筑外观质量检验,高桥下部桥面裂缝检测,海洋测绘,森林防火,地震、山洪等地质灾害的搜索、支援和营救等工作。
三轴云台运动学建模全文共四篇示例,供读者参考第一篇示例:三轴云台是一种常用于航空摄影和无人机等设备中的重要部件,其主要作用是对摄像头或其他设备进行稳定控制,从而拍摄出更加清晰、稳定的影像。
在实际应用中,三轴云台的运动学建模是至关重要的,可以帮助我们更好地了解其运动规律,并设计出更加高效稳定的控制算法。
本文将对三轴云台的运动学建模进行详细介绍。
一、三轴云台的结构和工作原理三轴云台通常由三个轴组成,包括俯仰轴、横滚轴和偏航轴。
俯仰轴控制摄像头在竖直平面上的倾斜角度,横滚轴控制摄像头在水平平面上的旋转角度,而偏航轴则用于控制摄像头在水平平面上的方向。
通过对这三个轴进行精确的控制,可以实现对摄像头姿态的稳定调整。
三轴云台的工作原理主要是通过内部的传感器来感知设备当前的姿态,然后通过电机驱动来调整摄像头的位置,从而保持其稳定。
具体来说,通过陀螺仪、加速度计等传感器对设备当前的角度和加速度进行监测,然后通过控制电机的转动来实现对设备姿态的调整,使其保持在所需的角度范围内。
二、三轴云台的运动学建模三轴云台的运动学建模是指通过数学方法对其运动规律进行描述和分析,从而为后续的控制算法设计提供基础。
在进行运动学建模时,需要考虑以下几个方面的因素:1. 坐标系的选择:在进行三轴云台的运动学建模时,需要选择适当的坐标系来描述设备的姿态和位置。
通常情况下,会选择惯性坐标系和设备坐标系两种坐标系,通过它们之间的转换关系来描述设备的运动。
2. 姿态表示:三轴云台的姿态可以通过欧拉角、四元数等方式进行表示。
欧拉角是通过设备相对于三个坐标轴的旋转角度来描述姿态,而四元数则是通过一个复数来表示设备的方向。
在建模时,需要选择适合自己的姿态表示方式进行描述。
3. 运动方程的建立:通过实际测量和分析,可以建立出三轴云台在不同控制模式下的运动方程。
这些方程通常由设备的姿态、角速度和加速度等参数来描述,可以帮助我们更加清晰地了解设备的运动规律。
以我给的标题写文档,最低1503字,要求以Markdown 文本格式输出,不要带图片,标题为:三轴云台方案# 三轴云台方案## 引言随着无人机和摄像设备的快速发展,三轴云台在实际应用中扮演着越来越重要的角色。
三轴云台可以通过稳定性和精确控制的方式,使摄像设备在运动中保持平稳,从而获得更加清晰和稳定的图像。
本文将介绍三轴云台的基本原理、构成以及常见的三轴云台方案。
## 三轴云台的基本原理三轴云台的基本原理是利用三个轴(俯仰轴、横滚轴和偏航轴)的控制,使得摄像设备能够在多个方向上进行稳定的转动。
- 俯仰轴:控制摄像设备的上下运动;- 横滚轴:控制摄像设备的左右运动;- 偏航轴:控制摄像设备的旋转运动。
通过控制这三个轴的角度变化,可以实现对摄像设备姿态的精确控制,从而保持摄像设备在运动中的稳定性。
## 三轴云台的构成一个典型的三轴云台通常由以下主要组成部分构成:1. 云台底座:提供三轴云台的主要支撑结构;2. 俯仰轴:使摄像设备能够进行上下运动的部分;3. 横滚轴:使摄像设备能够进行左右运动的部分;4. 偏航轴:使摄像设备能够进行旋转运动的部分;5. 控制系统:用于控制三轴云台的运动,通常包括电机驱动、传感器和控制算法等。
## 常见的三轴云台方案### 1. 伺服电机方案伺服电机方案是一种传统的三轴云台方案,通过使用伺服电机来控制摄像设备的姿态。
其中,每个轴都配备一个伺服电机,并通过位置反馈传感器来保持轴的精确控制。
伺服电机方案通常具有较高的精度和稳定性,但也存在一些缺点,如成本较高、响应速度较慢等。
### 2. 步进电机方案步进电机方案是另一种常见的三轴云台方案,使用步进电机来控制轴的运动。
与伺服电机方案不同的是,步进电机通过精确的步进角度控制来实现轴的控制。
步进电机方案相对于伺服电机方案来说,成本较低且响应速度更快,但也存在一些缺点,如较低的精度和较大的振动等。
### 3. 无刷电机方案无刷电机方案是近年来兴起的三轴云台方案,使用无刷电机取代传统的伺服电机或步进电机。
无人机云台稳定系统研究与控制算法设计无人机是一种主要通过无线电通信遥控或内置自主控制计算机飞行的飞行器,其广泛应用于民用和军事领域。
无人机在近年来迅速发展,使得已经初具规模的无人机市场成为了人们关注的热点话题。
然而,随着无人机技术的迅速发展,无人机云台稳定系统研究与控制算法设计也逐渐成为了无人机研究的核心问题之一。
一、无人机云台稳定系统研究1. 云台结构云台是无人机载荷运输和精确控制的关键部分,稳定性是云台的最基本要求。
从机械结构的角度来看,云台主要由云台控制器、切向式电机、云台支撑构架、旋翼舵机以及传感器组成。
旋翼舵机的重点在于云台的摆动,包括俯仰、横滚和偏航运动。
切向式电机负责控制云台的旋转方向,传感器则是获取无人机姿态变化的数据以便调整控制系统。
2. 控制系统控制系统也是无人机云台稳定系统的重要组成部分,以选择嵌入式系统作为云台的控制核心。
嵌入式系统自带高速处理器芯片,能够进行较为复杂的控制算法设计,同时也能进行数据采集和通信。
嵌入式系统不仅具有较高的计算速度和实时性,还能够应对不同运动场景下的运动轨迹,确保云台的稳定性。
控制算法方面的设计主要包括几种基本的优化控制方法,如PID控制和LQR控制。
二、控制算法设计1. PID控制PID控制全称为比例积分微分控制,是一种传统的控制算法,在工业控制中广泛应用。
PID控制按照误差的比例、积分、微分三个参数对功率进行控制,以达到稳定控制目的。
其中,比例环节是误差和控制结果的比例,积分环节是误差和控制位置的累计,微分环节是上次误差和上次控制结果的差。
PID控制方法具有计算简单、易于调整、实用性高的特点,常用于稳定运动系统。
2. LQR控制LQR控制全称为线性二次调节控制,是一种优化控制方法。
LQR控制不仅具有PID控制算法的特点,还能够优化系统的状态控制。
LQR控制利用最小二乘法以及状态控制理论,对误差进行优化控制。
通过调整状态的权重矩阵,不断求解控制器矩阵,优化控制系统的状态。
acceleration estimation and compensation are added to the system control loop.It’s indicated the three-axis pan-tilt control requirements can be met by the design of the cloud axis platform control system which is robust to anti-interference and control accuracy is high.Keywords:Three-axis pan-tilt;Sage-Husa adaptive filtering algorithm;UD decomposition; motion acceleration estimation and compensation;fuzzy PID目录摘要 (I)Abstract (II)第一章绪论 (1)§1.1课题研究背景及意义 (1)§1.2稳定云台国内外研究现状 (2)§1.3稳定云台控制方法分析 (2)§1.4课题研究内容及论文结构 (3)第二章三轴云台系统模型描述 (5)§2.1三轴云台结构原理 (5)§2.2三轴云台姿态角描述 (5)§2.3三轴云台控制系统模型建立 (7)§2.4三轴云台扰动力矩分析 (8)§2.5本章小结 (8)第三章姿态测量传感器数据融合算法 (9)§3.1姿态测量与数据融合 (9)§3.2Sage-Husa自适应滤波算法 (9)§3.3UD分解方法 (11)§3.4改进的Sage-Husa自适应滤波器 (12)§3.4.1系统模型设计 (12)§3.4.2测量方程 (12)§3.4.3观测方程 (13)§3.4.4基于UD分解算法的Sage-Husa自适应滤波计算步骤 (14)§3.5仿真实验与结果分析 (14)§3.5.1采用单位阶跃信号作为仿真信号 (15)§3.5.2实际采集数据的对比试验 (17)§3.6本章小结 (19)第四章运动加速度抑制算法 (20)§4.1运动加速度模型 (20)§4.1.1运动加速度模型 (20)§4.1.2运动加速度估计 (20)§4.1.3姿态及运动加速度更新 (21)§4.1.4补偿算法的理论依据 (21)§4.1.5补偿算法的收敛性及其改进 (21)§4.2仿真验证 (22)§4.3实物验证 (24)§4.4本章小结 (26)第五章三轴云台控制器设计 (27)§5.1三轴云台PID控制器设计 (27)§5.1.1PID控制理论基础 (27)§5.1.2基于PID算法的三轴云台设计 (28)§5.2基于模糊PID的三轴云台控制 (29)§5.2.1模糊PID控制理论基础 (29)§5.2.2模糊控制器设计 (31)§5.2.3基于模糊PID的姿态控制 (36)§5.3仿真实验与结果分析 (37)§5.3.1Matlab/Simulink仿真 (37)§5.3.2仿真实验与结果分析 (37)§5.4本章小结 (39)第六章三轴云台总体设计与验证 (40)§6.1三轴云台控制算法的改进 (40)§6.2仿真验证 (42)§6.3三轴云台硬件验证平台介绍 (44)§6.3.1硬件整体设计 (44)§6.3.2主控芯片 (45)§6.3.3惯性测量模块 (45)§6.3.4电机控制模块 (46)§6.3.5PWM模块 (47)§6.3.6电源模块设计 (47)§6.4三轴云台控制器的可靠性设计 (48)§6.5本章小结 (48)第七章总结与展望 (50)§7.1总结 (50)§7.2展望 (51)参考文献 (52)致谢 (55)作者在攻读硕士期间主要研究成果 (56)第一章绪论第一章绪论§1.1课题研究背景及意义机载三轴云台是机载相机的载体,用于稳定机载相机,在对地观测时使机载相机能够获取高精度、无失真的对地观测影像,是机载测绘技术的重要研究方向之一。
三轴云台原理
三轴云台是一种常见的摄影设备,它可以帮助摄影师在拍摄过
程中保持相机的稳定,从而获得清晰、平滑的画面。
三轴云台的原
理是基于陀螺仪和加速度计的工作原理,通过精密的控制系统来实
现对相机的稳定控制。
本文将详细介绍三轴云台的原理及其工作过程。
首先,三轴云台由三个轴组成,分别是俯仰轴、横滚轴和偏航轴。
俯仰轴负责控制相机的俯仰运动,即上下运动;横滚轴负责控
制相机的横滚运动,即左右运动;偏航轴负责控制相机的偏航运动,即旋转运动。
通过这三个轴的协同工作,可以实现对相机姿态的稳
定控制。
其次,三轴云台的工作原理主要依赖于陀螺仪和加速度计。
陀
螺仪是一种测量角速度的传感器,可以感知相机的旋转运动;加速
度计是一种测量加速度的传感器,可以感知相机的线性运动。
通过
实时获取陀螺仪和加速度计的数据,并结合控制算法,可以精确地
计算出相机当前的姿态,并实时调整三轴云台的运动,从而保持相
机的稳定。
三轴云台的工作过程可以简单概括为以下几个步骤,首先,陀
螺仪和加速度计感知相机的运动状态,并将数据传输给控制系统;
其次,控制系统根据传感器数据计算出相机的姿态,然后通过电机
驱动三轴云台进行相应的调整;最后,三轴云台根据控制系统的指令,对相机进行实时的稳定控制,从而保证拍摄的画面清晰、平滑。
总之,三轴云台是一种利用陀螺仪和加速度计实现相机稳定控
制的摄影设备,通过精密的控制系统和电机驱动,可以实现对相机
姿态的实时调整,从而获得高质量的拍摄画面。
希望本文能够帮助
大家更好地理解三轴云台的原理和工作过程。