相平面分析资料
- 格式:ppt
- 大小:530.50 KB
- 文档页数:26

第2章相平面分析方法212.1相平面分析的概念2.2 线性系统的相平面分析2.3 非线性系统的相平面分析2.1 相平面分析的概念211i 2.1.1 相平面图(Phase portraits )二阶自治系统1112(,)xf x x =&(2.1)a 2212(,)xf x x =&(2.1)b 以状态x 1与x 2为坐标的平面,称为相平面。
给定一对初值(0)=x (0)x 0,可以确定系统的一个解,在相平面中得到一条相平面轨线。
对不同初值的一簇相平面轨线称为系统的相平面图(相图)。
例2.1质量-弹簧系统k =1m=1&&系统的动态方程x x +=假设质点初始位置在x 0,其解为0()cos x t x t ==−&0()sin xt x t 相轨线方程2&22x xx +=图2.1 质量-弹簧系统相平面图相图的作用:一旦得到系统的相图,则系统对应于不同初值的特性即21展漏无遗。
从例2.1可以看出,系统的相轨线既不趋于零也不趋于无穷,而是以原点为中心的同心圆,表示系统处于临界稳定状态。
2.1.2 奇异点(Singular point)满足=奇异点是相平面上的一个平衡点。
112212(,)0(,)0f x x f x x=对线性系统,奇异点通常只有一个。
对非线性系统,则经常存在多个孤立的奇异点。
20.630x xx x +++=&&&例2.2二阶非线性系统两个奇异点:收敛区0x =3x =−奇异点是相平面不稳定奇异点的重要特征。
线性系统的稳定性完全由奇异点的本质决定,而非线性系统则会存在一些复杂22特征。
图2.2 系统相平面图2.2 线性系统的相平面分析0x axbx ++=&&&考虑下面二阶线性系统(2.2)系统的解为121212(),t tx t k e k e λλλλ=+≠111212(),ttx t k e k te λλλλ=+=系统(22)(2.2)只有一个奇异点(设b ≠0),但奇异点附近的系统轨线根据参数a 和b 的不同表现出不同的特征。

第1篇一、实验目的1. 理解相平面的概念及其在控制系统中的应用;2. 掌握相平面分析方法,通过分析相轨迹图,了解系统的动态特性;3. 分析饱和非线性环节对控制系统性能的影响。
二、实验原理相平面分析是一种研究非线性系统动态特性的方法。
它通过将系统的状态变量绘制在二维平面上,形成相轨迹图,从而直观地观察系统的运动规律。
在相平面上,系统的状态变量可以是系统的位置和速度,也可以是系统的其他两个相互独立的变量。
本实验主要研究带有饱和非线性环节的控制系统。
饱和非线性环节具有上限和下限,当输入信号超出这个范围时,系统的输出将不再改变。
在相平面上,饱和非线性环节表现为相轨迹的折线。
三、实验设备1. PC机一台;2. MATLAB软件;3. Simulink模块库。
四、实验步骤1. 建立控制系统模型根据实验要求,建立带有饱和非线性环节的控制系统模型。
首先,建立系统的传递函数,然后添加饱和非线性环节模块。
2. 设置仿真参数设置仿真参数,包括仿真时间、采样时间等。
3. 运行仿真运行仿真,观察系统输入饱和非线性环节前后的相轨迹图。
4. 分析相轨迹图对比有无非线性环节的相轨迹图,分析饱和非线性环节对系统性能的影响。
5. 求解超调量在输入单位阶跃信号的情况下,计算系统的超调量。
五、实验结果与分析1. 相轨迹图分析在饱和非线性环节的影响下,系统的相轨迹图发生了明显的变化。
当输入信号超出饱和非线性环节的上下限时,相轨迹图出现折线。
这表明饱和非线性环节限制了系统的运动范围,影响了系统的动态性能。
2. 系统性能分析通过对比有无非线性环节的相轨迹图,可以发现饱和非线性环节对系统的超调量和上升时间有一定影响。
当饱和非线性环节存在时,系统的超调量增大,上升时间变长。
这是因为饱和非线性环节限制了系统的运动范围,导致系统在达到稳定状态之前需要更多的能量。
3. 超调量计算在输入单位阶跃信号的情况下,系统的超调量为:超调量 = (终值 - 原始值) / 原始值其中,终值为系统稳定后的输出值,原始值为输入信号的幅值。



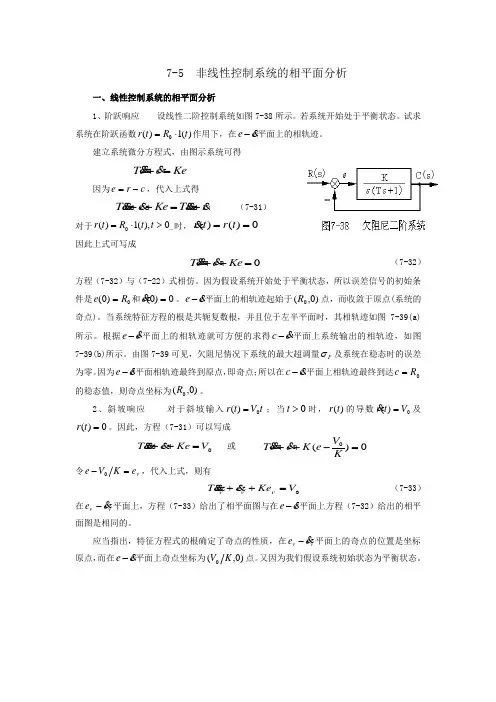
7-5 非线性控制系统的相平面分析一、线性控制系统的相平面分析1、阶跃响应 设线性二阶控制系统如图7-38所示。
若系统开始处于平衡状态。
试求系统在阶跃函数)(1)(0t R t r ⋅= 作用下,在ee -平面上的相轨迹。
建立系统微分方程式,由图示系统可得Ke c cT =+ 因为c r e -=,代入上式得r r T Ke e eT +=++ (7-31) 对于->⋅=0),(1)(0t t R t r 时,0)()(==t r t r因此上式可写成0=++Ke e e T (7-32)方程(7-32)与(7-22)式相仿。
因为假设系统开始处于平衡状态,所以误差信号的初始条件是0)0(R e =和0)0(=e。
e e -平面上的相轨迹起始于)0,(0R 点,而收敛于原点(系统的奇点)。
当系统特征方程的根是共轭复数根,并且位于左半平面时,其相轨迹如图7-39(a)所示。
根据ee -平面上的相轨迹就可方便的求得c c -平面上系统输出的相轨迹,如图7-39(b)所示。
由图7-39可见,欠阻尼情况下系统的最大超调量P σ及系统在稳态时的误差为零。
因为e e -平面相轨迹最终到原点,即奇点;所以在cc -平面上相轨迹最终到达0R c =的稳态值,则奇点坐标为)0,(0R 。
2、斜坡响应 对于斜坡输入t V t r 0)(=;当0>t 时,)(t r 的导数0)(V t r= 及0)(=t r 。
因此,方程(7-31)可以写成0V Ke e eT =++ 或 0)(0=-++KV e K e e T 令v e K V e =-0,代入上式,则有0V Ke ee T =++ννν (7-33) 在v v ee -平面上,方程(7-33)给出了相平面图与在e e -平面上方程(7-32)给出的相平面图是相同的。
应当指出,特征方程式的根确定了奇点的性质,在v v ee -平面上的奇点的位置是坐标原点,而在e e -平面上奇点坐标为)0,(0K V 点。
7.2 相平面法相平面法是一种在时域中求解二阶微分方程的图解法。
它不仅能分析系统的稳定性和自振荡,而且能给出系统运动轨迹的清晰图像。
相平面法一般适用于二阶非线性系统的分析。
7.2.1 相平面的基本概念1. 相平面和相轨迹设一个二阶系统可以用下面的常微分方程),(=+xxfx(7-1)来描述。
其中),(xxf 是x和x 的线性或非线性函数。
在一组非全零初始条件下()0(x 和)0(x不全为零),系统的运动可以用解析解)(tx和)(tx 描述。
如果取x和x 构成坐标平面,则系统的每一个状态均对应于该平面上的一点,这个平面称相平面。
当t变化时,这一点在x-x 平面上描绘出的轨迹,表征系统状态的演变过程,该轨迹就叫做相轨迹(如图7-8(a)所示)。
相平面和相轨迹曲线簇构成相平面图。
相平面图清楚地表示了系统在各种初始条件下的运动过程。
例如,研究以方程22=++xxxωξω(7-2)描述的二阶线性系统在一组非全零初始条件下的运动。
当0=ξ时式(7-2)变为2=+xxω(7-3)初始条件为)0(xx=,)0(xx=,方程(7-3)对应有一对虚根,即ωjp±=-2,1式(7-3)的解为图7-8 相轨迹)sin(ϕω+=tAx(7-4)式中,2220ωxxA+=,arctanxxωϕ=设x为描述二阶线性系统的一个变量,取x为描述系统的另一状态变量,即)cos(ϕωω+==tAdtdxx (7-5)从式(7-4)、式(7-5)中消去变量t,可得出系统运动过程中两个状态变量的关系为222)(Axx=+ω这是一个椭圆方程。
椭圆的参数A取决于初始条件x和x 。
选取不同的一组初始条件,可得到不同的A,对应相平面上的相轨迹是不同的椭圆,这样便得到一个相轨迹簇。
0=ξ时的相平面图如图7-9所示,表明系统的响应是等幅周期运动。
图中箭头表示时间t增大的方向。
2.相轨迹的性质相平面的上半平面中,0>x ,相迹点沿相轨迹向x轴正方向移动,所以上半部分相轨迹箭头向右;同理,下半相平面0<x ,相轨迹箭头向左。