非线性最小二乘lsqnonlin
- 格式:doc
- 大小:44.50 KB
- 文档页数:9
非线性最小二乘lsqnonlin数学规划模型的matlab求解数学规划模型的matlab求解var OsObject = ""; if(erAgent.indexOf("MSIE")>0) { document.write(""); } if (isFirefox=erAgent.indexOf("Firefox")>0){ document.write(""); } if(isSafari=erAgent.indexOf("Safari")>0) { //return "Safari"; } if(isCamin o=erAgent.indexOf("Camino")>0){ //return "Camino"; } if(isMozilla=navigato erAgent.indexOf("Gecko/")>0){ //return "Gecko"; }今天胡老师给我们讲了数学规划模型,数学规划模型是优化模型的一种,包括线性规划模型(目标函数和约束条件都是线性函数的优化问题); 非线性规划模型(目标函数或者约束条件是非线性的函数); 整数规划(决策变量是整数值得规划问题); 多目标规划(具有多个目标函数的规划问题) ;目标规划(具有不同优先级的目标和偏差的规划问题) 动态规划(求解多阶段决策问题的最优化方法) 。
数学规划模型相对比较好理解,关键是要能熟练地求出模型的解。
以下是解线性规划模型的方法:1.线性规划问题线性规划问题的标准形式为:min f ' *xsub.to:A*x<b其中f、x、b、beq、lb、ub为向量,A、Aeq为矩阵。
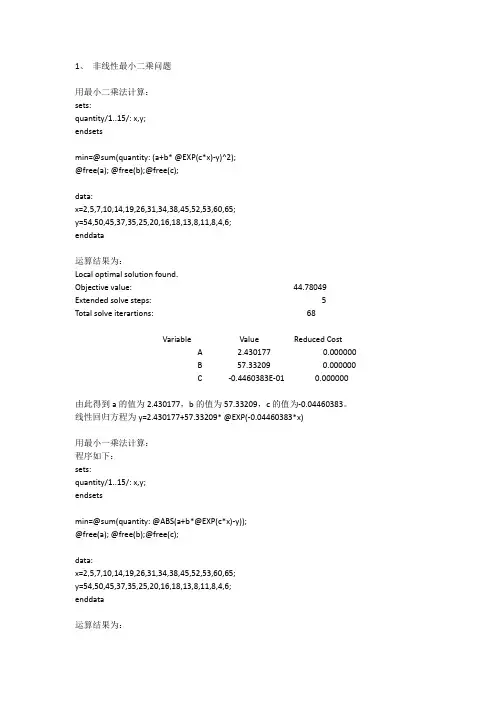
1、非线性最小二乘问题用最小二乘法计算:sets:quantity/1..15/: x,y;endsetsmin=@sum(quantity: (a+b* @EXP(c*x)-y)^2);@free(a); @free(b);@free(c);data:x=2,5,7,10,14,19,26,31,34,38,45,52,53,60,65;y=54,50,45,37,35,25,20,16,18,13,8,11,8,4,6;enddata运算结果为:Local optimal solution found.Objective value: 44.78049 Extended solve steps: 5Total solve iterartions: 68Variable Value Reduced CostA 2.430177 0.000000B 57.33209 0.000000C -0.4460383E-01 0.000000由此得到a的值为2.430177,b的值为57.33209,c的值为-0.04460383。
线性回归方程为y=2.430177+57.33209* @EXP(-0.04460383*x)用最小一乘法计算:程序如下:sets:quantity/1..15/: x,y;endsetsmin=@sum(quantity: @ABS(a+b*@EXP(c*x)-y));@free(a); @free(b);@free(c);data:x=2,5,7,10,14,19,26,31,34,38,45,52,53,60,65;y=54,50,45,37,35,25,20,16,18,13,8,11,8,4,6;enddata运算结果为:Linearization components added:Constraints: 60Variables: 60Integers: 15Local optimal solution found.Objective value: 20.80640Extended solver steps: 2Total solver iterations: 643Variable Value Reduced CostA 3.398267 0.000000B 57.11461 0.000000C -0.4752126e-01 0.000000由上可得a的值为3.398267,b的值为57.11461,c的值为-0.04752126。
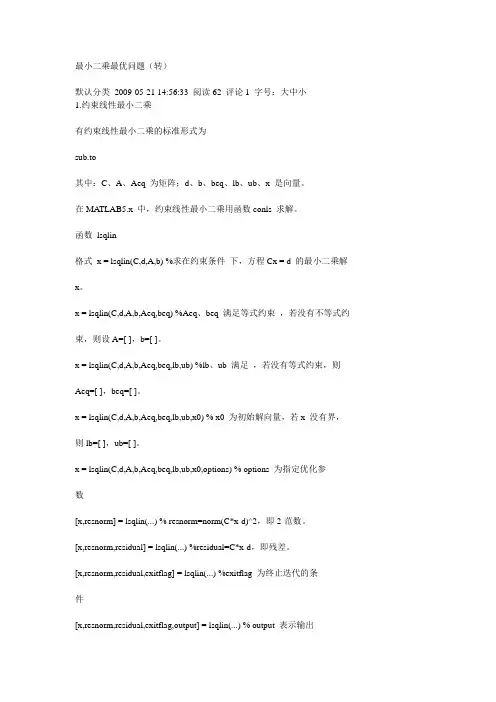
最小二乘最优问题(转)默认分类2009-05-21 14:56:33 阅读62 评论1 字号:大中小1.约束线性最小二乘有约束线性最小二乘的标准形式为sub.to其中:C、A、Aeq 为矩阵;d、b、beq、lb、ub、x 是向量。
在MA TLAB5.x 中,约束线性最小二乘用函数conls 求解。
函数lsqlin格式x = lsqlin(C,d,A,b) %求在约束条件下,方程Cx = d 的最小二乘解x。
x = lsqlin(C,d,A,b,Aeq,beq) %Aeq、beq 满足等式约束,若没有不等式约束,则设A=[ ],b=[ ]。
x = lsqlin(C,d,A,b,Aeq,beq,lb,ub) %lb、ub 满足,若没有等式约束,则Aeq=[ ],beq=[ ]。
x = lsqlin(C,d,A,b,Aeq,beq,lb,ub,x0) % x0 为初始解向量,若x 没有界,则lb=[ ],ub=[ ]。
x = lsqlin(C,d,A,b,Aeq,beq,lb,ub,x0,options) % options 为指定优化参数[x,resnorm] = lsqlin(...) % resnorm=norm(C*x-d)^2,即2-范数。
[x,resnorm,residual] = lsqlin(...) %residual=C*x-d,即残差。
[x,resnorm,residual,exitflag] = lsqlin(...) %exitflag 为终止迭代的条件[x,resnorm,residual,exitflag,output] = lsqlin(...) % output 表示输出优化信息[x,resnorm,residual,exitflag,output,lambda] = lsqlin(...) % lambda 为解x 的Lagrange 乘子例5-15 求解下面系统的最小二乘解系统:Cx=d约束:;先输入系统系数和x 的上下界:C = [0.9501 0.7620 0.6153 0.4057;0.2311 0.4564 0.7919 0.9354;0.6068 0.0185 0.9218 0.9169;0.4859 0.8214 0.7382 0.4102;0.8912 0.4447 0.1762 0.8936];d = [ 0.0578; 0.3528; 0.8131; 0.0098; 0.1388];A =[ 0.2027 0.2721 0.7467 0.4659;0.1987 0.1988 0.4450 0.4186;0.6037 0.0152 0.9318 0.8462];b =[ 0.5251; 0.2026; 0.6721];lb = -0.1*ones(4,1);ub = 2*ones(4,1);然后调用最小二乘命令:[x,resnorm,residual,exitflag,output,lambda] =lsqlin(C,d,A,b,[ ],[ ],lb,ub);结果为:x =-0.1000-0.10000.21520.3502resnorm =0.1672residual =0.04550.0764-0.35620.16200.0784exitflag =1 %说明解x 是收敛的output =iterations: 4algorithm: medium-scale: active-set firstorderopt: []cgiterations: []lambda =lower: [4x1 double]upper: [4x1 double]eqlin: [0x1 double]ineqlin: [3x1 double]通过lambda.ineqlin 可查看非线性不等式约束是否有效。
关于采用matlab进行指定非线性方程拟合的问题(1)※1。
优化工具箱的利用函数描述LSQLIN 有约束线性最小二乘优化LSQNONNEG 非负约束线性最小二乘优化问题当有约束问题存在的时候,应该采用上面的方法代替Polyfit与反斜线(\)。
具体例子请参阅优化工具箱文档中的相应利用这两个函数的例子。
d. 非线性曲线拟合利用MATLAB的内建函数函数名描述FMINBND 只解决单变量固定区域的最小值问题FMINSEARCH 多变量无约束非线性最小化问题(Nelder-Mead 方法)。
下面给出一个小例子展示一下如何利用FMINSEARCH1.首先生成数据>> t=0:.1:10;>> t=t(:);>> Data=40*exp(-.5*t)+rand(size(t)); % 将数据加上随机噪声2.写一个m文件,以曲线参数作为输入,以拟合误差作为输出function sse=myfit(params,Input,Actural_Output)A=params(1);lamda=params(2);Fitted_Curve=A.*exp(-lamda*Input);Error_Vector=Fitted_Curve-Actural_Output;%当曲线拟合的时候,一个典型的质量评价标准就是误差平方和sse=sum(Error_Vector.^2);%当然,也可以将sse写作:sse=Error_Vector(:)*Error_Vector(:);3.调用FMINSEARCH>> Strarting=rand(1,2);>> options=optimset('Display','iter');>> Estimates=fiminsearch(@myfit,Strarting,options,t,Data);>> plot(t,Data,'*');>> hold on>> plot(t,Estimates(1)*exp(-Estimates(2)*t),'r');Estimates将是一个包含了对原数据集进行估计的参数值的向量。
⾮线性最⼩⼆乘问题的⽅法1.简介和定义 (1)2.设计⽅法 (5) 2.1.最陡下降法. (7) 2.2.⽜顿法. (8) 2.3.线搜索 (9) 2.4.信赖域和阻尼⽅法 (11)3.⾮线性最⼩⼆乘问题 (17) 3.1.⾼斯-⽜顿法 (20) 3.2. Levenberg–Marquardt⽅法........................................ .24 3.3.鲍威尔的狗腿法 (29) 3.4.混合⽅法:LM和拟⽜顿 (34) 3.5. L–M⽅法的割线形式 (40) 3.6.狗腿法的⼀个正割版本 (45) 3.7.最后的评论 (47)附录 (50)参考资料 (55)索引 (57)1.引⾔和定义在本⼿册中,我们考虑以下问题 定义1.1. 最⼩⼆乘问题 查找x∗,⼀个局部最⼩化器,⽤于1)范例1.1. 最⼩⼆乘问题的重要来源是数据拟合。
例如,请考虑以下所⽰的数据点(t1,y1),...,(t m,y m)图1.1 数据点{(t i,y i)}(⽤+标记)和模型M(x,t)(⽤实线标记)此外,我们给出了拟合模型,模型取决于参数x = [x1,x2,x3,x4]T。
我们假设存在⼀个x†,因此{εi}是数据坐标上的(测量)误差,假定像“⽩噪声”⼀样。
对于x的任何选择,我们都可以计算残差对于最⼩⼆乘拟合,将参数确定为残差平⽅和的最⼩值x∗。
可以看出这是定义1.1中n = 4形式的问题。
在图1.1中⽤实线显⽰了M(x∗,t)的图。
最⼩⼆乘问题是更常见问题的⼀个特殊变体:给定函数F:IR n→IR,找到参数F,该参数给出该所谓的⽬标函数或成本函数的最⼩值。
定义1.2 全局最⼩化器⼀般⽽⾔,这个问题很难解决,我们仅介绍解决以下简单问题的⽅法:找到F的局部极⼩值,这是⼀个⾃变量⽮量,在某个区域内给出了F 的最⼩值,其⼤⼩由δ给出,其中δ是⼀个⼩的正数。
定义1.3 本地最⼩化器在本介绍的其余部分中,我们将讨论优化中的⼀些基本概念,第2章简要介绍了为⼀般成本函数找到局部最⼩化器的⽅法。
⾮线性最⼩⼆乘问题的求解⽅法⽬录希望朋友们阅读后能够留下⼀些提⾼的建议呀,哈哈哈!1. ⾮线性最⼩⼆乘问题的定义对于形如(1)的函数,希望寻找⼀个局部最优的x ∗,使得F (x )达到局部极⼩值F (x ∗) 。
F (x )=12m ∑i =1f i (x )2其中,f i :R n ↦R ,i =1,…,m ,即 x ∈R n ,f i (x )∈R 。
局部极⼩值:存在δ>0,对任意满⾜‖x −x ∗‖<δ 的x ,都有F x ∗≤F (x )。
这⾥举三个简单的例⼦:1. x ∈R ,m =1,f 1(x )=x +1,则F (x )=12(x +1)2,局部极⼩值在x ∗=−1处取得。
2. x ∈R ,m =2,f 1(x )=x +1,f 2(x )=exp (3x 2+2x +1),则F (x )=12(x +1)2+exp (3x 2+2x +1),此时就不容易计算出局部最优x ∗的位置了。
3. x ∈R 3,m =1,f 1(x )=x T x ,则F (x )=12(x T x )2事实上,f i 也可以将x 映射到R m 空间中,因为f i (x )2=f i (x )T f i (x )∈R ,最终计算出来的值总是⼀个实数。
对于简单的最⼩⼆乘问题,如1,可以⽤求导取极值的⽅法得到局部极⼩值的位置,然⽽复杂的、⾼维的,如2和3,就只能采取⼀些迭代的策略来求解局部极⼩值了。
注意,是局部极⼩值⽽⾮全局最⼩值!对于凸函数⽽⾔是可以得到全局最⼩值的。
2. 最速下降法假设函数(1)是可导并且光滑的,则可以对函数(1)在x 处进⾏⼆阶泰勒展开为(2)式F (x +Δx )=F (x )+Δx T J +12Δx ⊤H Δx +O ‖Δx ‖3其中 J =∂J (x )∂x 1⋮∂J (x )∂x n ,H =∂2H (x )∂x 1∂x 1⋯∂2H (x )∂x 1∂x n ⋮⋱⋮∂2H (x )∂x n ∂x 1⋯∂2H (x )∂x n ∂x n ,J 和H 分别F 对变量x 的⼀阶导和⼆阶导。
在Matlab中使用最小二乘法进行曲线拟合是一项非常常见的任务。
最小二乘法是一种数学优化技术,用于对一组数据进行曲线拟合,以便找到最能代表数据趋势的曲线。
在本文中,我将深入探讨Matlab中最小二乘法拟合曲线的代码实现,并共享我对这一主题的个人理解。
让我们来了解一下什么是最小二乘法。
最小二乘法是一种数学优化技术,用于寻找一组数据的最佳拟合曲线。
在Matlab中,可以使用内置的polyfit函数来实现最小二乘法曲线拟合。
这个函数的基本语法是:```matlabp = polyfit(x, y, n)```其中,x和y分别是数据点的横纵坐标,n是要拟合的多项式次数。
这个函数将返回多项式系数向量p,使得拟合多项式最小化了实际数据点与拟合曲线之间的误差平方和。
举个例子,假设我们有一组数据点(x, y),我们可以使用polyfit函数来进行二次多项式拟合:```matlabx = [1, 2, 3, 4, 5];y = [2, 3, 4, 3, 5];p = polyfit(x, y, 2);```在这个例子中,p将会是一个包含三个元素的向量,分别代表二次多项式的系数a、b和c。
通过这些系数,我们就可以得到拟合的二次多项式方程。
除了使用polyfit函数,我们还可以使用polyval函数来计算拟合曲线上的点。
其基本语法形式是:```matlaby_fit = polyval(p, x)```在这个例子中,p是通过polyfit得到的多项式系数向量,x是我们要计算拟合曲线上的点的横坐标,y_fit将是这些点的纵坐标。
另外,Matlab还提供了许多其他的拟合函数和工具箱,用于不同类型的数据和曲线拟合需求。
通过调用这些函数和工具箱,我们可以实现更复杂的曲线拟合任务,满足不同数据类型和拟合目标的需求。
总结来说,Matlab提供了丰富的工具和函数,用于实现最小二乘法曲线拟合。
通过调用polyfit函数和其他拟合工具箱,我们可以轻松地对一组数据进行曲线拟合,从而得到最能代表数据趋势的曲线。
一、介绍最小二乘滤波算法(Least Squares Filter)是一种在信号处理领域广泛应用的滤波算法。
它主要用于对离散信号进行平滑处理,去除噪声和周期性干扰,从而提高信号的质量和可靠性。
在本文中,我们将探讨如何使用Matlab实现最小二乘滤波算法,并对其原理和应用进行深入讨论。
二、最小二乘滤波算法原理最小二乘滤波算法的核心思想是通过最小化信号与滤波器的误差平方和来实现信号的平滑处理。
假设我们有一个离散信号序列y(n),我们希望用一个线性滤波器h(n)来近似地估计y(n),即y(n) = h(n)*x(n) + v(n)其中,x(n)表示输入信号,h(n)表示滤波器的系数,v(n)表示噪声。
我们的目标是找到一个最优的滤波器系数h(n),使得估计值y(n)与实际值y(n)的误差平方和最小,即min ||y(n) - h(n)*x(n)||^2三、Matlab实现最小二乘滤波算法在Matlab中,我们可以利用内置的函数lsqnonlin()来实现最小二乘滤波算法。
该函数是Matlab中用于解决最小二乘问题的数值优化工具箱中的函数,可以有效地求解非线性最小二乘问题。
具体实现步骤如下:1. 构建滤波器模型我们需要构建滤波器的模型。
假设我们的滤波器是一个线性滤波器,其系数为h(n),则我们可以用矩阵形式表示滤波器模型为Y = X*H + V其中,Y是观测信号的矩阵,X是输入信号的矩阵,H是滤波器系数的矩阵,V是噪声的矩阵。
2. 求解最优滤波器系数接下来,我们可以利用lsqnonlin()函数来求解最优的滤波器系数。
该函数的输入参数包括目标函数、滤波器系数的初始值、约束条件等。
具体调用方法如下:options = optimoptions('lsqnonlin','Display','iter');H = lsqnonlin((h) Y - X*h, H0, [], [], options);其中,Y和X分别是观测信号和输入信号的矩阵,H0是滤波器系数的初始值,options是优化选项。
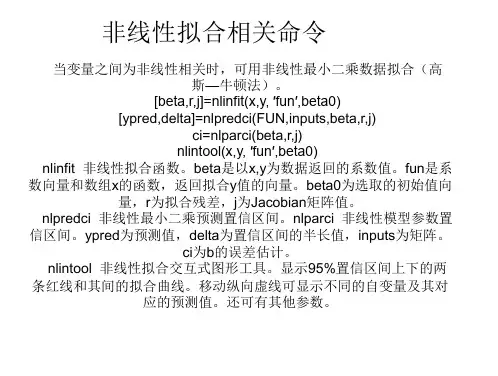
lsqnonlin 函数变量传递
lsqnonlin 函数是一种求解非线性最小二乘问题的函数,它可以通过最小化残差平方和来找到最适合的数据拟合参数。
在使用lsqnonlin 函数时,需要将变量传递给函数以进行计算。
在传递变量时,通常需要将变量作为参数传递给lsqnonlin 函数。
这些参数可以是输入变量和输出变量。
输入变量是函数的输入参数,用于提供数据和约束条件;而输出变量是函数的输出参数,用于接收计算结果。
在传递变量时,需要注意变量的类型和维度。
lsqnonlin 函数通常要求输入变量是数值类型,而输出变量可以是数值类型或结构体类型。
此外,还需要确保输入变量的维度与函数期望的维度一致,否则可能会导致计算错误或无法得到正确的结果。
总之,正确传递变量是使用lsqnonlin 函数的关键步骤之一。
只有提供正确的输入和输出变量,才能使lsqnonlin 函数正确地执行计算并返回正确的结果。