KOMAX自动机PPT幻灯片
- 格式:ppt
- 大小:8.40 MB
- 文档页数:83

KOMAX 机器资料KOMAX设备使用来加工电线的设备,包括Alpha433s、Gamma333PC/PC-B,Alpha411,Alpha355,Alpha455,Alpha4 88等,使用的软件为Topwin,Topwin在各种机器上的视图基本相同,这里我们仅以Alpha433为例制作培训资料,客户在使用它对操作者培训的时候请根据实际针对的机器类型做适当调整,由有经验的人员进行示范是最佳的培训方式。
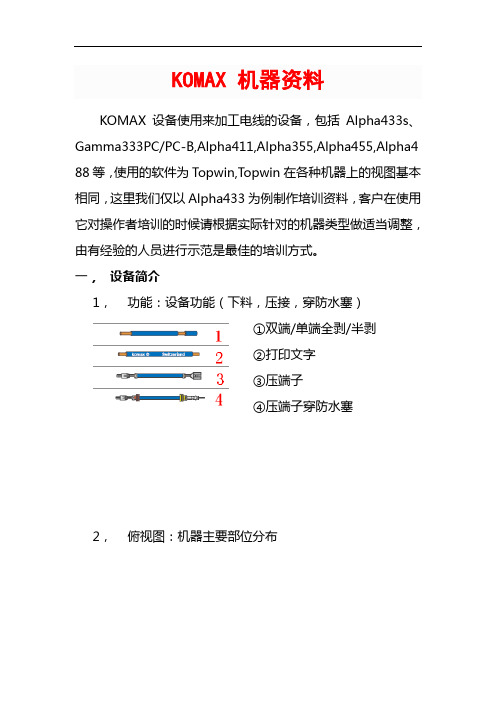
一,设备简介1,功能:设备功能(下料,压接,穿防水塞)①双端/单端全剥/半剥②打印文字③压端子④压端子穿防水塞2,俯视图:机器主要部位分布3,操作台分布图:4,TOPWIN各个界面简介a)配置界面:用于机器配置,操作者用不到b)工艺界面:设置工艺参数,(见软件详解)c)样品界面:加工样品取样,(见软件详解)d)生产界面:用于自动生产,(见软件详解)e)错误统计:显示错误信息,操作者用不到。
f)状态统计:显示生产状态,操作者用不到二,软件详解a)工艺界面总体视图:在工艺界面中,我们可以根据工艺卡的规定的导线规格、长度、剥头长度、端子和雨塞等建立待加工产品或者选择以前建立的工艺进行加工。
对应上图中所标数字部位的说明:①:后端剥皮长度,鼠标左键点击数字可更改,单位是毫米②:加工长度,鼠标左键点击数字可更改,单位毫米③:前端剥皮长度,鼠标左键点击数字可更改,单位毫米④:进线驱动部位,鼠标左键点击可进入导线选择和编辑界面⑤:端子压接机,鼠标左键点击可进入端子选择和编辑界面⑥:雨塞加工设备,鼠标左键点击可进入雨塞选择和编辑界面⑦:背景黄色并显示电源可打开,此时可按下给电按钮i.选择或添加导线(名称,线径,颜色)第一步:第二步:(鼠标点击上图所示后弹出下面窗口)第三步:(在第二步中选择建立/复制后弹出下面界面)第四步:输入导线规格颜色①这里输入导线截面积,比如0.5平方毫米②这里输入导线芯线直径,一般使用默认值即可③这里输入绝缘皮直径,一般使用默认值即可④这里用来设置线的颜色,可设多色线⑤点此按钮将正在编辑的线加载为要加工的线ii.选择或添加端子(名称,尺寸,外观)第一步:鼠标左键点压接机位置(类似于添加线)第二步:选择你需要的端子,如果没有选择“建立/复制”第三步:输入端子序号(类似于添加线)第四步:输入端子数据,如下图①鼠标点这里可进入速度设置界面,可使用默认选项②鼠标点这里进入CFA设置界面,操作者禁用③这里输入端子长度,参考⑥位置所示④这里输入该端子需要的剥头长度,工艺卡上有规定⑤端子样式,都是开式端子垂直地,不需要更改⑥端子图象,可以看到端子长度剥头长度测量位置iii.选择或添加雨塞(名称,尺寸,颜色)雨塞的选择和建立复制过程等同与端子,不再复述。

Robotics Advance Training 机器人培训(提高篇)Data RepresentationData Type/数据类型Declarations/声明Expressions/表达式Assignment Statement/赋值语句Typecasting/类型转换Data Type/数据类型Data Type List:1.INTEGER8.POSITION2.REAL9.JOINTPOS3.BOOLEAN10.XTNDPOS4.STRING11.NODE5.ARRAY12. SEMAPHORE6.RECORD7.VECTOR•INTEGER / 整数值范围:-2147483647 ~ +2147483647PDL2中可进行的运算:算术运算(+, -, *, /, DIV, MOD, **, +=, -=)比较运算(<, >, =, <>, <=, >=)位运算(AND,OR,XOR,NOT,SHR,SHL,ROR,ROL)•REAL / 实数值范围:-3.4E+38 ~ -1.18E-38,1.18E-38 ~ 3.4E+38PDL2可进行的运算:算术运算(+, -, *, /, **)比较运算(<, >, =, <>, <=, >=)•BOOLEAN / 布尔值值:TRUE(ON) / FALSE(OFF)PDL2可进行的运算:比较运算(=, <>)布尔运算(AND, OR, XOR, NOT)•STRING / 字符串属性:ASCII 或UNICODE字符串长度:最大2048 BytesASCII Value:‘ASCII code 126 is a tilde: \126‘UNICODE:“UNICODE 8A89 is \u0x8A89” (用双引号)Data Type/数据类型•ARRAY / 数组维数:一维或者二维每一维最大的容量:65535Note:最大值受到系统可用内存的限制Data Type/数据类型•RECORD / NODERECORD/NODE:多个数据项组合而成的结构体类型:except SEMAPHORE, RECORD, NODE, PATH区别::区别NODE包括用户定义的域,还包括系统预定义的域RECORD只包含用户自定义的域定义::定义RECORD和NODE都是在程序的TYPE SECTION定义的新定义的RECORD和NODE可以用来定义变量和参数定义方法如下::定义方法如下Data Type/数据类型•VECTOR / 矢量包括大小和方向VECTOR操作时可以用系统预定义的field变量:X,Y,ZData Type/数据类型Euler Angle of Rotation/转动示例Data Type/数据类型•JOINTPOS角度表示))机器人各关节位置((角度表示JOINTPOS 代表:机器人各关节位置NOTE:JOINTPOS变量是和一个指定的ARM绑定的不能被其他的ARM使用•XTNDPOSXTNDPOS用途:机器人本体和外部轴组成一个整体的情况XTNDPOS变量信息是和特定的ARM绑定XTNDPOS 数据组成:机器人的笛卡尔坐标,外部轴的信息•SEMAPHORE用途:防止多个程序同时使用同一个资源语句:WAIT Statement, SIGNAL StatementDeclaration/声明•CONSTANT /常量声明•常量声明是在程序的CONST Section中声明•PDL2提供了常用的预定义常量,这些常量在PredefinedConstants Lists中可以查找•TYPE声明•用于定义RECORD和NODE•详细见Data Type中RECORD和NODE章节•VARIABLE/变量变量声明声明•变量声明是在程序的VAR Section中声明•变量声明时变量可以具有如下属性:•exported from and global•initial value•NOSAVE•CONST•NODATAShared variables, routines•EXPORTED FROM•语法语法::EXPORTED FROMprog_name/routines•GLOBAL AND IMPORT•语法语法::variable_name GLOBALroutine_name EXPORTED FROM progr_name GLOBAL示例:PROGRAM aIMPORT ‘b ‘ VARx : INTEGER GLOBALary : ARRAY [5] OF REAL GLOBALROUTINE rout (x :REAL) EXPORTED FROM a GLOBAL BEGIN END rout BEGIN ENDaExpressions/表达式•Expressions /表达式Arithmetic operations/算术运算运算符:+, -, *, DIV, /, MOD, **, +=, -=Relational operations/比较运算运算符:<, >, =, <=, >=, <>Logical operations/逻辑运算运算符:AND, OR, XOR, NOTBitwise operations/位运算运算符:AND, OR, XOR, NOTROR, ROL, SHR, SHLVECTOR operations /矢量运算运算符:#, @Position operations运算符:(:)•运算符优先级Data Representation练习(一)编写多个简单的程序,主要包括:1. 变量定义,结构和关键字2. 常量定义,注意赋值方法3. 变量赋值,不同变量在赋值的注意点Motion ControlMOVE StatementsStopping and Restarting motions ATTACH and DETACH Statements HAND StatementsMOVE Statements/移动语句•MOVE Statement主要指通过机器人的臂、运动轨迹、目标位置、可选择项、连续运动等选项控制机器人的运动语法:MOVE <arm_clause> <traj_clause> dest_clause<opt_clauses> <sync_clause>arm_clause:机器人臂•可选择相应的机器人臂ARM[1],ARM[2]……traj_clause:轨迹选择•可选轨迹:关节、直线、圆弧dest_clause:目标位置•多种move类型,move to/ move near/ move awayopt_clause:可选择项•ADVANCE、TIL、WITH语句sync_clause:同步运动•当机器人多臂同步运动,用SYNCMOVE语句MOVE Statements/移动语句•MOVE TO:移到目标点MOVE TO destination•MOVE NEAR:沿工具坐标系法向量靠近当前点MOVE NEAR destination BY 250•MOVE AWAY:沿工具坐标系法向量远离当前点MOVE AWAY 250如右图•MOVE RELATIVE在相应的坐标相应的坐标系系中沿着指定的向量移动一定距离MOVE LINEAR RELATIVE VEC(100,0,100) IN TOOL如右图MOVE Statements/移动语句•MOVE FOR工具旋转的角度和移动的距离成比例正数沿着目标点移动,负数沿着目标点反方向移动 MOVE FOR 100 TO destination如右图•MOVE ABOUT在相应的坐标系中沿着向量转动一定角度 MOVE ABOUT VEC(0,100,0) BY 90IN TOOL如右图MOVE Statements/移动语句•TIL Clause当达到一定条件,motion 将被取消MOVE TO slot TIL $DIN[1]+ DIN[1]变成高电平,运动被取消以下条件语句可以使用:AT VIATIME n AFTER START TIME n BEFORE ENDDISTANCE n AFTER START DISTANCE n BEFORE END DISTANCE n AFTER VIA DISTANCE n BEFORE VIA PERCENT n AFTER START PERCENT n BEFORE END Digital pots例子:MOVE TO slot TIL $DIN[1]+MOVE TO perch TIL TIME 1000 AFTER START MOVE TO perch TIL DISTANCE 100 BEFORE END MOVE TO perch TIL PERCENT 20 BEFORE END•ADVANCE Clause当程序有ADVANCE ,运动插值和程序编译同时进行 MOVEFLY 语句必须要有ADVANCE例子:MOVE TO pnt0001p MyRoutine1()--机器人运动到01点后执行MyRoutine1MOVE TO pnt0002p ADVANCE MyRoutine2()--机器人向02点运动的同时执行MyRoutine2MOVE TO pnt0003pMOVE Statements/移动语句•WITH ClauseMotion 过程中,可以通过with 语句给预定义变量赋值或者使能一些条件句柄With 语句只对当前MOVE Statement 有效,对其他的MOVE Statemet 无效当WITH 语句重启一行,下一行必须使用WITH ,且MOVE 语句要加ENDMOVE 例子:MOVE TO p1 WITH $PROG_SPD_OVR = 50 MOVE TO p1 WITH CONDITION[1]MOVE TO p1 WITH $PROG_SPD_OVR= 50, CONDITION[1]MOVE TO p1 WITH $PROG_SPD_OVR = 50,WITHCONDITION[1], CONDITION[2], CONDITION[3],WITH $TOOL = drive_tool, WITH $MOVE_TYPE = LINEAR ENDMOVE预定义变量如右图->1. 速度/加速度:$ARM_ACC_OVR , $ARM_DEC_OVR$ARM_SPD_OVR , $JNT_OVR$PROG_ACC_OVR, $PROG_DEC_OVR , $PROG_SPD_OVR , $ROT_SPD $SPD_OPT , $LIN_SPD 2. 碰撞检测:$COLL_SOFT_PER , $ARM_SENSITIVITY$COLL_TYPE 3. 坐标系:$BASE , $TOOL , $UFRAME , $TOOL_RMT $TOOL_CNTR , $TOOL_FRICTION , $TOOL_INERTIA , $TOOL_MASS 4. 配置:$CNFG_CARE , $JNT_MTURN ,$SING_CARE , $TURN_CARE , $ARM_LINKED5. 连续运动:$FLY_DIST, $FLY_PER , $FLY_TRAJ$FLY_TYPE , $STRESS_PER 6. 精度控制:$TERM_TYPE , TOL_COARSE ,$TOL_FINE 7. 轨迹控制:$MOVE_TYPE8. 功能/应用:$SENSOR_ENBL, $SENSOR_TIME ,$SENSOR_TYPE , $WEAVE_NUM $WEAVE_TYPE , $WV_AMP_PER 9. 其它:$AUX_OFST , $PARStop and Restart motions•CANCEL MOTION Statement•运动一旦被取消,将不能再恢复•CANCEL CURRENT /CURRENT SEGMENT•CANCEL CURRENT•CANCEL CURRENT SEGMENT•CANCEL CURRENT FOR ARM[1], ARM[2] •CANCEL CURRENT SEGMENT FOR ARM[3] •CANCEL CURRENT FOR ALL•CANCEL CURRENT SEGMENT FOR ALL•CANCEL ALL /ALL SEGMENT•CANCEL ALL•CANCEL ALL SEGMENT•CANCEL ALL FOR ARM[1], ARM[2] •CANCEL ALL SEGMENT FOR ARM[3] •CANCEL ALL FOR ALL•CANCEL ALL SEGMENT FOR ALL•LOCK, UNLOCK, RESUME Statement•LOCK, LOCK ARM[1], LOCK ALL•被LOCK 的运动可以恢复,使用UNLOCK+RESUME 组合•例子例子::--This program is to show how to use LOCK--File :motion_2PROGRAM motion_2VAR p1, p2: POSITION BEGIN CYCLEIF $DIN[1]=ON THENLOCKELSEUNLOCK RESUMEENDIFMOVE TO p1MOVEFLY TO p2 ADVANCEEND motion_2HOLD, ATTACH, DETACH•HOLD Statement•HOLD 的用法和示教器上HOLD 是一样的•恢复HOLD 语句,需要按TP 上的START例子:--This program is to show how to use HOLD --File: motion_3PROGRAM motion_3VARp1, p2, p3 : POSITION BEGINMOVE TO p1IF $DIN[1]=ON THENHOLD ELSEMOVE TO p2ENDIFMOVE TO p3END motion_3•ATTACH and DETACH Statement•当多个程序使用同一设备时,ATTACH 和DETACH 可以控制能使用该设备的程序,常见的设备有ARM•Notes:1.当attached arm 用于另一个程序或正在执行动作,机器人会报错2.程序默认的是attach prog_arm•HAND Statement•机器人法兰上的工具能够通过HAND Statement 控制•每个机械臂最多能够有两个HAND•HAND Statement 使用的前提:机器人必须通过HAND 配置软件的配置,才可以使用HAND Statement 语句•HAND 的控制是通过IO 信号Data Representation练习(二)编写简单的程序,程序主要包括:1. Move statement2. Stop and restart statement3. ATTACH and DETACHExecution ControlFlow ControlProgram ControlProgram SynchronizationProgram SchedulingFlow Control/流控制•Flow Control/流控制语句•主要用于控制程序执行的流程,包括IF, SELECT, FOR,WHILE, REPEAT, GOTO•IF Statement/IF 选择语句•IF 选择语选择语句执行流句执行流句执行流程图程图程图::Flow Control/流控制•SELECT Statement/程序判断选择语句•SELECT 选择语选择语句执行流句执行流句执行流程图程图程图::Flow Control/流控制•FOR Statement/FOR循环语句•不建议在FOR语句中使用GOTO语句•FOR循环语句执行流循环语句执行流程图程图::程图Flow Control/流控制•WHILE Statement/WHILE循环语句•WHILE语句的应用和FOR语句类似•WHILE循环语句执行流环语句执行流程图程图::程图Flow Control/流控制•REPEAT Statement/REPEAT循环语句•REPEAT和WHILE、FOR一样都是循环语句•REPEAT循环语句执行流程图循环语句执行流程图::Flow Control/流控制•GOTO Statement/GOTO循环语句•GOTO无条件跳转语句•禁止使用GOTO语句跳转进入或跳出FOR循环•GOTO循环语句执行流程图循环语句执行流程图::Program Control/程序控制•Program Control/程序控制语句•程序属性(Program Attribute):•holdable(默认):通过START/HOLD控制•non-holdable:用于过程控制程序•holdable和non-holdable在PROGRAM声明中定义•程序状态(Program State):•running: 程序正在执行•paused: 程序被暂停,PAUSE statement•ready: 程序已就绪,需要按START开始执行程序•paused-ready: 程序已就绪,但被暂停了。
