按转子磁链定向的矢量控制系统
- 格式:doc
- 大小:4.25 MB
- 文档页数:51

按照转子磁链定向旳矢量控制系统仿真1.矢量控制技术概述异步电机旳动态数学模型是一种高阶、非线性、强耦合旳多变量系统,其控制十分复杂。
矢量控制实现旳基本原理是通过测量和控制异步电动机定子电流矢量,根据磁场定向原理分别对机旳励磁电流和转矩电流进行控制,从而到达控制异步电动机转矩旳目旳。
将异步电动机旳异步电动定子电流矢量分解为产生磁场旳电流分量(励磁电流) 和产生转矩旳电流分量(转矩电流) 分别加以控制,并同步控制两分量间旳幅值和相位,即控制定子电流矢量,因此称这种控制方式称为矢量控制方式。
ω图1 带转矩内环节磁链闭环旳矢量控制系统构造图2.几种关键问题:●转子磁链函数发生器根据电机旳调速范围和给定旳转速信号,在恒转矩范围内恒磁通调速、转子磁通保持额定磁通;在恒功率范围内弱磁调速,转子磁通随转速指令旳增大而减小。
转子磁链函数发生器用来产生磁链大小信号。
这里采用下面旳曲线。
转子磁链旳幅值一般为1。
●转子磁链旳观测与定向转子磁链旳观测模型重要有二种:(1) 在两相静止坐标系上旳转子磁链模型电机旳定子电压和电流由传感器测得后,通过3S/2S 变换,再根据异步电机在两项静止坐标系下旳数学模型,计算转子磁链旳大小。
()r αm s αr r βr 11L i T T p ψωψ=-+ ()r βm s βr r αr 11L i T T p ψωψ=++ (2) 按磁场定向两相旋转坐标系上旳转子磁链模型三相定子电流 iA 、 iB 、iC 经3/2变换变成两相静止坐标系电流 is α 、 is β ,再经同步旋转变换并按转子磁链定向,得到M ,T 坐标系上旳电流 ism 、ist ,运用矢量控制方程式m st1s r rL i T ωωωψ-==mr smr 1L i T p ψ=+可以获得 ψr 和 ωs 信号,由ωs 与实测转速 ω 相加得到定子频率信号ω1,再经积分即为转子磁链旳相位角ϕ ,它也就是同步旋转变换旳旋转相位角。

感应电动机转差型矢量控制系统的设计1 引言感应电动机具有结构简单、坚固耐用、转速高、容量大、运行可靠等优点。
但是,由于感应电动机是一个高阶、非线性、强耦合的多变量系统,磁通和转矩耦合在一起,不能像直流电动机那样,磁通和转矩可以分别控制。
所以,一直到20世纪80年代都没有获得高性能的感应电动机调速系统。
近年来,随着电力电子技术、现代控制理论等相关技术的发展,使得感应电动机在可调传动中获得了越来越广泛的应用。
矢量控制策略的提出,更是实现了磁通和转矩的解耦控制,其控制效果可媲美直流电动机。
本文在分析感应电动机矢量控制原理的基础上,基于matlab/simulink建立了感应电动机转差型矢量控制系统仿真模型,仿真结果证明了该模型的合理性。
并在此基础上进行系统的软、硬件设计,通过实验验证控制策略的正确性。
2 矢量控制的基本原理长期以来,直流电动机具有很好的运行特性和控制特性,通过调节励磁电流和电枢电流可以很容易的实现对转矩的控制。
因为它的转矩在主磁极励磁磁通保持恒定的情况下与电枢电流成线性关系,所以通过电枢电流环作用就可以快速而准确地实现转矩控制,不仅使系统具有良好稳态性能,又具有良好的动态性能。
但是,由于换向器和电刷的原因,直流电动机有它固有的缺点,如制造复杂,成本高,需要定期维修,运行速度受到限制,难以在有防腐防暴特殊要求的场合下应用等等。
矢量控制的设计思想是模拟直流电动机的控制特点进行交流电动机控制。
基于交流电动机动态模型,通过矢量坐标变换和转子磁链定向,得到等效直流电动机的数学模型,使交流电动机的动态模型简化,并实现磁链和转矩的解耦。
然后按照直流电动机模型设计控制系统,可以实现优良的静、动态性能。
转子磁链ψr仅由定子电流励磁电流ism产生,与定子电流转矩分量ist无关,而电磁转矩te正比于转子磁链和定子电流转矩分量的乘积,这充分说明了感应电动机矢量控制系统按转子磁链定向可以实现磁通和转矩的完全解耦。

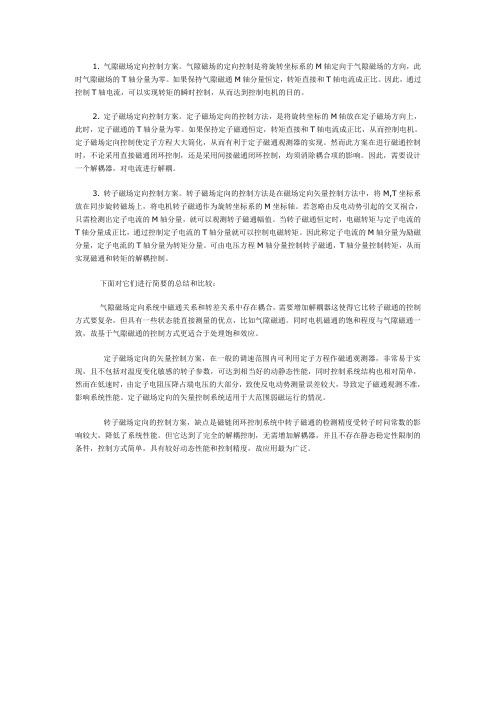
1. 气隙磁场定向控制方案。
气隙磁场的定向控制是将旋转坐标系的M轴定向于气隙磁场的方向,此时气隙磁场的T轴分量为零。
如果保持气隙磁通M轴分量恒定,转矩直接和T轴电流成正比。
因此,通过控制T轴电流,可以实现转矩的瞬时控制,从而达到控制电机的目的。
2. 定子磁场定向控制方案。
定子磁场定向的控制方法,是将旋转坐标的M轴放在定子磁场方向上,此时,定子磁通的T轴分量为零。
如果保持定子磁通恒定,转矩直接和T轴电流成正比,从而控制电机。
定子磁场定向控制使定子方程大大简化,从而有利于定子磁通观测器的实现。
然而此方案在进行磁通控制时,不论采用直接磁通闭环控制,还是采用间接磁通闭环控制,均须消除耦合项的影响。
因此,需要设计一个解耦器,对电流进行解耦。
3. 转子磁场定向控制方案。
转子磁场定向的控制方法是在磁场定向矢量控制方法中,将M,T坐标系放在同步旋转磁场上,将电机转子磁通作为旋转坐标系的M坐标轴。
若忽略由反电动势引起的交叉祸合,只需检测出定子电流的M轴分量,就可以观测转子磁通幅值。
当转子磁通恒定时,电磁转矩与定子电流的T轴分量成正比,通过控制定子电流的T轴分量就可以控制电磁转矩。
因此称定子电流的M轴分量为励磁分量,定子电流的T轴分量为转矩分量。
可由电压方程M轴分量控制转子磁通,T轴分量控制转矩,从而实现磁通和转矩的解耦控制。
下面对它们进行简要的总结和比较:气隙磁场定向系统中磁通关系和转差关系中存在耦合,需要增加解耦器这使得它比转子磁通的控制方式要复杂,但具有一些状态能直接测量的优点,比如气隙磁通。
同时电机磁通的饱和程度与气隙磁通一致,故基于气隙磁通的控制方式更适合于处理饱和效应。
定子磁场定向的矢量控制方案,在一般的调速范围内可利用定子方程作磁通观测器,非常易于实现,且不包括对温度变化敏感的转子参数,可达到相当好的动静态性能,同时控制系统结构也相对简单,然而在低速时,由定子电阻压降占端电压的大部分,致使反电动势测量误差较大,导致定子磁通观测不准,影响系统性能。

l 囊缀转子磁链定向间接矢量控制系统的解析与展望田建文李国芳(兰州交通大学甘肃兰州730070)应用摹毒拳[摘要]建立三相异步电机的数学模型并化简。
应用现代控制理论中的状态观测器的构建方法对转子磁链定向问解矢量控制进行解析。
应用现代控制理论解决实际问题,并从理论的角度为三相异步电机的矢量控制作了一下诠释。
为理解异步电机矢量控制理论提供了有益的启示并对矢量控制进行展望。
[关键词】三相异步电动机数学模型现代控制理论状态观铡器矢量控制中图分类号:T Pl 3文献标识码:^文章编号:1671—7597(2D 08)0720099一02本文主要介绍了间接矢量控制技术,在旋转坐标dq 轴系下化简电动机数学模型,建立磁通状态观测器,推导出算法公式;并对矢量控制的发展方向作了展望。
一、异步电动机的教掌模噩由电机学知识,我们建立异步电动机的坐标模型:A B c 轴为三相交流静止坐标,dq 轴是以同步角速度_“旋转的二相直流旋转坐标。
图1异步电动机的坐标模趔:、在d q 轴下化简电机的数掌模受由交流电机坐标变换理论,我们可以得到在同步旋转的d q 轴下的电机模型。
在dq 轴下的磁链方程:£JOO厶kOOkkOO k£.0L(1)其中k=主k 。
为dq 坐标系同轴等效定子与转子绕组间的互感;1t3厶,+号k-为dq 坐标系等效二相定子绕组的自感:L ,=厶:+兰k 。
为dq 坐标系等效二相转子绕组的自感。
在dq 轴下电压方程:c ,m%U .2U t 2焉oooT i 。
o 焉ooKIo o 如oI ‘ooo 露:上k唯一y .1P 只妒-l ,岛一y 。
2p 吼虬2pB(2)其中PB 为dq 旋转坐标系相对于定子的角速度。
P 幺为dq 坐标系相对于转子的角速度M 。
在dq 轴下的转矩方程为:t=~驯“:一t 岛)去(3)由此可得异步动机在dq 轴上的数学模型的基本方程式(1)、(2)、(3).兰、应用状夺空同分析d q 轴下的数学模型选取状态量x=k 。