三相异步电动机矢量控制仿真
- 格式:docx
- 大小:3.15 MB
- 文档页数:12

文章编号:1008-3499(2001)02-0023-04三相异步电动机矢量控制调速系统的建模与仿真李家荣,邓智泉(南京航空航天大学自动化学院,江苏南京210016)摘要:简述了Matlab/Simulink软件的核心内容及已获实际应用的异步电机矢量变换控制系统的数学模型,介绍了用Matlab/Simulink为该系统建立完整仿真模型的过程,最后给出仿真结果O 关键词:异步电动机;矢量控制;调速系统;仿真;模型中图分类号:TM343.22文献标识码:A0引言异步电动机矢量变换控制系统和直接转距控制系统都是目前已获得应用的高性能异步电机调速系统,对比直接转矩控制系统,矢量变换控制系统有可连续控制~调速范围宽等优点,因此矢量变换控制系统仍为现代交流调速的重要方向之一O本文一则介绍一种实用化的异步电机矢量变换控制系统,二则通过用Matlab语言为该系统建立仿真模型的过程,使读者能熟悉Matlab软件的应用并掌握之OI Matlab/Simulink环境及特点Matlab是集命令翻译~科学计算于一身的一套交互式软件系统O它除了传统的交互式编程之外,还提供了丰富可靠的矩阵运算~图形绘制~数据处理~图像处理~方便的WindOWs编程等便利工具O Simulink是MAT~W0RKS软件公司为Matlab开发的系统模型图形输入和仿真工具O Simulink提供了丰富的模型库供构造完整的系统使用O其模型库包括:源环节~汇环节~离散时间环节~线性环节~非线性环节~连接环节~其他环节OMatlab/Simulink是开放的编程环境,它允许用户开发自己所需的模型,通过成组封装扩充现有的模型库O要建立自己的模型,方法主要如下:(1)利用现有模型组合成新模型O(2)使用Matlab/Simulink模型调用MAT-LAB函数,适于构造成y=f(I)型的函数O(3)通过S-functiOn模型构造,适于解决I/=AI-Bu型微~差分方程O总的来说,方法(1)和(2)具有局限性,适合构造较为简单的模型O方法(3)是M/S最具特色的编程方式,它在构造多输入,多输出,非线性,强耦合的复杂多变量系统时具有表述方式接近数学表述,编程简洁,计算速度快的优点O下面本文针对矢量变换控制系统各环节的不同特点综合运用上述三种编程方式建立完整的系统模型进行仿真O2异步电机矢量变换控制系统的建模与仿真2.1感应电机的状态空间模型本节将描述异步电机的数学模型,并用M/S的S-functiOn构造出其模型O在静止O,B坐标系统中,将异步电机方程写为状态方程组I/=AI-Bu形式,其中I为状态变量,u为输入变量,A~B为系数矩阵O在异步电机状态方程中,转子磁链和定子电流为状态变量,定子电压为输入变量Oddtarbrz aszTL1bs=-R rL r-c rR r L mL rc r-R rL rR r L mL rL m R rhL rL m c rh-R s L r2-R r L m2hL r-L m c rhL m R rhL r0-R s L2r-R r L2mhLTL1r-第10卷第2期2001年6月淮海工学院学报JOurnal Of~uaihai institute Of TechnOlOgyVOl.10NO.2!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!June2001收稿日期:2001-03-09a b asbsL /IL /I ~as~[]bs,(1)其中,R s 7定子绕组电阻; 7微分算子;R 7转子绕组电阻;I =L s X L -L m X L m ;L s 7a 轴上定转子等效绕组自感;c 7转子角速度;L 7b 轴上定转子等效绕组自感;L m 7坐标系中定子与转子间同轴等效绕组间的互感,电机的电磁转矩方程为,T e =N L mL( a bs - b as ),(2)机械转速方程为,dcdt=(T e -T 1-Dc )/J ,(3)2.2仿真模型图1为用Marlab /Simulink 对矢量变换控制系统建立的仿真模型,限于篇幅,仅讨论几个主要环节模块的建立,图1矢量变换控制系统仿真模型Fig .1The simulation model of vector alternate control system2.2.1电流控制变频器为保证变频器输出正弦波形的电流,选择了电流控制的变频器,变频器是电压源型,电流控制变频的模型如图2所示,其中U %a ,U %b ,U %c 与U a ,U b ,U c 的关系为,U ab =V a -V b ,U bc =V b -V c ,U ca =V c -V a ,U a =(U ab -U ca )/3,U b =(U bc -U ab )/3,U c =(U ca -U bc )/3,图2电流控制变频的模型Fig .2The model of f reguency conversion by current control2.2.2电机模型所建立的电机模型如图3所示,42淮海工学院学报 2 1年6月图3电机模型Fig .3The mOtOr mOdel图中U a ,U b ,U c 为三相电源,T L 为负载转矩,z a ,z b ,z c 为电机三相定子电流,c r 为转子角速度O 在电机模块中,三相电压U a ,U b ,U c 经坐标变换,转换成O ,B 坐标下的两相电压U a1,U b1,与检测出的角速度c r 一起构成一个矢量,作为式(1)的已知量,通过S -function 计算出定子电流和转子磁链;根据(2)求出电磁转矩T e ,再通过转距模型,计算出转子角速度c r O2.2.3转子磁链观测模型众所周知,矢量变换就是通过坐标变换,将异步电机等效成直流电机,从而可获得与直流电机一样优良的异步电机调速特征O 通常,我们将定子电流z a ,z b ,z c 经过三相/二相和旋转坐标变换后,可等效成同步旋转坐标下的直流电流z m ~z t ,z m 相当于励磁电流,z t 相当于与转矩成正比的电枢电流,其中:z m =T 2p-1L m2,z t =c f T 2L m2,(4)T 2为转子电路时间常数; 2为转子磁链;c f 为转子滑差角速度O 转子磁链观测模型如图4所示O 利用式(4),可获得转子磁链 2和转子滑差角速度c f O c f 与实测的转子角速度c r 相加,可获得转子旋转磁场角速度c S ,再经积分,即可得转子磁链相位角O图4转子磁链观测模型Fig .4The mOdel Of view by rOtOr magnetic f ield2.3仿真结果建立了仿真模型后,准备了仿真所必需的数据后,就可以进行仿真了O所选用的异步电机的性能参数如下所示:定子电阻:R S =2.460;转子电阻:R r =2.310;定子电阻:L S =O.14~;转子电感:L r =O.14~;转动惯量:J =O.OO2276kg m 2;电机相对数:n p =2;负载转矩:T L =5N m O52第2期李家荣等:三相异步电动机矢量控制调速系统的建模与仿真选择的转速指定值为1440r /min 获得了转速 定子电流 电磁转矩等曲线0图5~图6~图7分别为他们在起动过程中的仿真曲线0通过仿真结果表明 本文所阐述的异步电动机矢量控制调速系统具有优良的静~动态特性图5转速仿真曲线Fig .5The simulated curVe by rotationalspeed图6定子电流仿真曲线Fig .6The simulated curVe by statorcurrent图7电磁转矩仿真曲线Fig .7The simulated curVe by electromagnetic turning sguare3结束语本文系统而简略地介绍了Matlab /Simulink 介绍了基于Matlab /Simulink 的异步电机矢量控制系统的建模与仿真 希望本文能帮助读者尽快掌握Matlab 软件在动态仿真中的应用0参考文献:[1]陈伯时 陈敏逊.交流调速系统[M ].北京:机械工业出版社 1998.[2]陈坚.交流电机数学模型及调速系统[M ].北京:国防工业出版社 1989.[B ]王成元.矢量控制交流伺服驱动电动机[M ].北京:机械工业出版社 1995.[4]张志涌.精通MATLAB [M ].北京:北京航空航天大学出版社 2000.作者简介:李家荣(1972-) 女 江苏盐城人 盐城工学院讲师 南京航空航天大学硕士在读 从事于电机控制研究0Modelling and Simulation of vector Control adj ustable -speedSystem of asynchronous MotorLI ]ia -rong DENG Zhi -guan(Dept .of Automatic Control Nanjing university of Aeronautics g Astronautics Nanjing 210016 China )abstract :Intro d uction is ma d e to the core contents of Matlab /Simulink soft W are an d the applie d maths mo d el of vector control a d justable -spee d system of asynchronous motor .Mean W hile a brief account is giv-en to the process in W hich simulation mo d el is establishe d for this system by Matlab /Simulink as W ell as the simulation results .K ey W ords :asynchronous motor ;vector control ;a d justable -spee d system ;simulation ;mo d el(本文责任编校:褚金红)62淮海工学院学报2001年6===================================================================月。
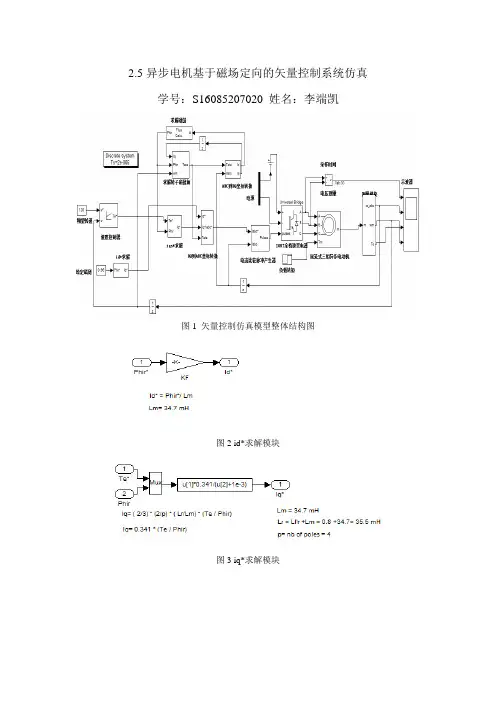
2.5异步电机基于磁场定向的矢量控制系统仿真学号:S16085207020 姓名:李端凯图1 矢量控制仿真模型整体结构图图2 id*求解模块图3 iq*求解模块图4 DQ到ABC坐标转换模块图5 求解转子磁链角模块图6-1 ABC到DQ坐标转换模块在这一部分转换中包含两种变换——3/2变换和旋转变换。
在交流电动机中三相对称绕组通以三相对称电流可以在电动机气隙中产生空间旋转的磁场,在功率不变的条件下,按磁动势相等的原则,三相对称绕组产生的空间旋转磁场可以用两相对称绕组来等效,三相静止坐标系和两相静止坐标系的变换则建立了磁动势不变情况下,三相绕组和两相绕组电压、电流和磁动势之间的关系。
图1绘出了ABC 和αβ两个坐标系中的磁动势矢量,按照磁动势相等的等效原则,三相合成磁动势与两相合成磁动势相等,故两套绕组磁动势在α、β轴上的投影都应相等,于是得:()233332333cos60cos6011 ()22sin 60sin 602a b c a b c b c b c N i N i N i N i N i i i N i N i N i N i i αβ=--=--=-=+写成矩阵形式: 图6-2 ABC 和αβ两个坐标系中的磁动势矢量111220a b c i i i i i αβ⎤⎡⎤--⎥⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦⎢⎥⎣⎦⎣ 再就是旋转变换,两相静止坐标系和两相旋转坐标系的变换(简称2s/2r 变换),两相静止绕组,通以两相平衡交流电流,产生旋转磁动势。
如果令两相绕组转起来,且旋转角速度等于合成磁动势的旋转角速度,则两相绕组通以直流电流就产生空间旋转磁动势。
从两相静止坐标系到两相旋转坐标系的变换,称为两相旋转-两相静止变换,简称2s/2r 变换。
其变换关系为:cos sin sin cos d q i i i i αβφφφφ-⎡⎤⎡⎤⎡⎤=⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦由此整理得到:111cos sin 22sin cos 0a d b q c i i i i i φφφφ⎡⎤⎡⎤--⎢⎥⎡⎤⎤⎢⎥⎢=⎢⎥⎥⎢⎥-⎢⎦⎣⎦⎢⎥⎣⎦⎢⎣ 同理可得:DQ 到ABC 坐标转换则是其逆变换。
异步电动机矢量控制系统的设计与仿真.异步电动机矢量控制系统的设计与仿真在矢量控制技术出现之前,现代交流调速系统采用了恒压频比控制策略。
这种控制策略的缺点是,当电机低速旋转或在加减速、负载加减等动态条件下,系统性能显著降低,导致交流调速系统在低速、启动时转矩的动态响应和整个系统的稳定性方面不如DC调速系统,无法满足人们对高精度的要求。
后来,交流异步电动机控制开始从标量控制向矢量控制迈进。
以下是矢量控制理论的简要介绍。
矢量控制发展的基础和核心理论支撑是电机的一些概念,如坐标转换原理、机电能量转换理论等。
这种控制的基本思想和方法是将异步电机模拟成DC电机来控制。
只要建立等效于三相交流绕组组的两相绕组,就可以建立等效于异步电机的DC电机模型,并增加相应的比例积分调节环节,从而可以按照DC 电机的控制策略来控制异步电机。
因此,矢量控制可以实现对电机电磁转矩的动态实时控制,从而优化和提高调速性能。
根据这一思想,我在本项目中成功地进行了MATLAB仿真。
关键词:交流电机;矢量控制调速系统;矢量控制系统的设计与仿真交流调速系统的仿真采用常V/f比控制方法,通常称为标量控制。
采用这种方法的系统在电机低速运行时或在加速、减速、增加负载、减少负载等情况下会出现重大缺陷。
采用矢量控制的交流电机可以达到与恒流电机相同的控制性能,从此交流异步电机控制从标量控制向矢量控制迈进了一大步。
以下是矢量控制理论的简要介绍。
矢量控制发展的基础和核心理论支撑是电机的一些概念,如坐标转换原理、机电能量转换理论等。
这种控制的基本思想和方法是将异步电机模拟成DC电机来控制。
只要建立等效于三相交流绕组组的两相绕组,就可以建立等效于异步电机的DC电机模型,并增加相应的比例积分调节环节,从而可以按照DC电机的控制策略来控制异步电机。
因此,矢量控制可以实现对电机电磁转矩的动态实时控制,从而优化和提高调速性能。
根据这一思想,我在本项目中成功地进行了MATLAB仿真。

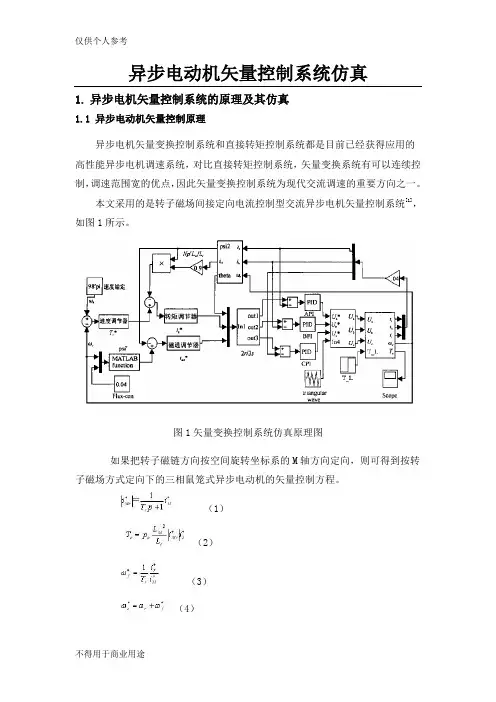
异步电动机矢量控制系统仿真1.异步电机矢量控制系统的原理及其仿真1.1 异步电动机矢量控制原理异步电机矢量变换控制系统和直接转矩控制系统都是目前已经获得应用的高性能异步电机调速系统,对比直接转矩控制系统,矢量变换系统有可以连续控制,调速范围宽的优点,因此矢量变换控制系统为现代交流调速的重要方向之一。
本文采用的是转子磁场间接定向电流控制型交流异步电机矢量控制系统[1],如图1所示。
图1矢量变换控制系统仿真原理图如果把转子磁链方向按空间旋转坐标系的M轴方向定向,则可得到按转子磁场方式定向下的三相鼠笼式异步电动机的矢量控制方程。
(1)(2)(3)(4)(5)上列各式中,是转子励磁电流参考值;是转差角频率给定值;是定子电流的励磁分量;是定子电流的转矩分量;是定子频率输入角频率;是转子速度;是转子磁场定向角度;是转子时间常数;和分别是电机互感和转子自感。
图4所示控制系统中给定转速与实际电机转速相比较,误差信号送入转速调节器,经转速调节器作用产生给定转矩信号,电机的激磁电流给定信号根据电机实际转速由弱磁控制单元产生,再利用式(1)产生定子电流激磁分量给定信号,定子电流转矩分量给定信号则根据式(2)所示的电机电磁转矩表达式生成。
、和转子时间常数Lr一起产生转差频率信号,与ωr相加生成转子磁场频率给定信号,对积分则得到转子磁场空间角度给定信号。
和经坐标旋转和2/3相变换产生定子三相电流给定信号、和,与定子三相电流实测信号、和相比较,由滞环控制器产生逆变器所需的三相PWM信号。
1.2 异步电机转差型矢量控制系统建模在MATLAB/SIMULINK环境下利用电气系统模块库中的元件搭建交流异步电机转差型矢量控制系统[2],电流控制变频模型如图2所示。
图2 电流控制变频模型图整个仿真图由电气系统模块库中的元件搭建组成,元件的直观连接与实际的主电路相像似,其中主要包括:速度给定环节,PI速度调节器、坐标变换模块、磁场定向模块、滞环电流调节器、IGBT逆变器元件、异步电动机元件以及测量和显示模块。
目录1. 矢量控制基本原理: (1)2.电机模型推导: (2)3。
仿真模型框图 (5)3。
1 坐标系下异步电机的仿真模型 (5)3。
2各元件的参数图 (6)3.3三相异步电机的仿真模型 (8)3。
4各模块的原理图 (9)3.5仿真的初始数据 (10)4 矢量控制系统设计 (11)4.1 矢量控制系统的电流闭环控制方式思想 (11)4。
2 MATLAB系统仿真系统设计 (11)4.3 PI调节器设计 (13)5.仿真结果 (15)6.个人总结 (17)7。
参考文献 (18)异步电机矢量控制Matlab仿真实验1. 矢量控制基本原理:矢量控制系统的基本思路是以产生相同的旋转磁动势为准则,将异步电动机在静止三相坐标系上的定子交流电流通过坐标变换等效成同步旋转坐标系上的直流电流,并分别加以控制,从而实现磁通和转矩的解耦控制,以达到直流电机的控制效果。
所谓矢量控制,就是通过矢量变换和按转子磁链定向,得到等效直流电动机模型,在按转子磁链定向坐标系中,用直流电动机的方法控制电磁转矩与磁链,然后将转子磁链定向坐标系中的控制量经变换得到三相坐标系的对应量,以实施控制。
其中等效的直流电动机模型如图1-1所示,在三相坐标系上的定子交流电流,,A B C i i i ,通过3/2变换可以等效成两相静止正交坐标系上的交流s i α和s i β再通过与转子磁链同步的旋转变换,可以等效成同步旋转正交坐标系上的直流电流sm i 和st i 。
m 绕组相当于直流电动机的励磁绕组,sm i 相当于励磁电流,t 绕组相当于电枢绕组,st i 相当于与转矩成正比的电枢电流。
其中矢量控制系统原理结构图如图1—2所示。
图1—1 异步电动机矢量变换及等效直流电动机模型图1—2矢量控制系统原理结构图通过转子磁链定向,将定子电流分量分解为励磁分量sm i 和转矩分量st i ,转子磁链r ψ仅由定子电流分量sm i 产生,而电磁转矩e T 正比与转子磁链和定子电流转矩分量的乘积,实现了定子电流的两个分量的解耦。
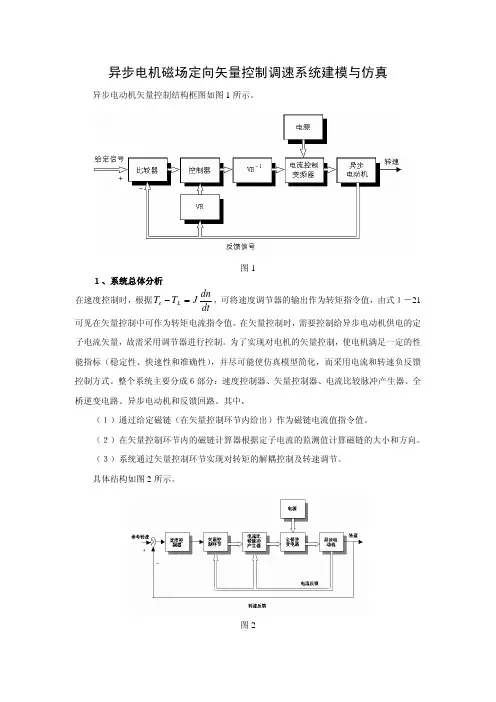
摘要本文对三相异步电动机按转子磁链定向的矢量控制系统进行了计算机仿真研究,运用Matlab/Simulink和SimPowerSystem工具箱及面向系统电气原理结构图的仿真方法,实现了带转矩内环的转速、磁链闭环矢量控制系统的建模与仿真;重点介绍了调速系统的建模和调节器参数的设置,给出了矢量交流调速系统的仿真模型和仿真结果非常接近实际情况,说明了仿真模型的正确性。
关键词:异步电动机;交流调速;矢量控制目录摘要 (I)1概述 (1)2总系统设计 (2)3子系统设计 (6)3.1 转速控制器 (6)3.2 定向控制器 (6)4三相异步电动机磁场定向矢量控制系统仿真 (8)4.1参数给定 (8)4.2系统仿真 (10)总结 (12)参考文献 (13)附录 (14)1概述交流调速技术在工业领域的各个方面应用很广,对于提高电力传动系统的性能有着重要的意义,由于电力传动系统的复杂性和被控对象的特殊性,使得对它的建模与仿真一直是研究的热点。
对其仿真研究不能像控制系统那样可用各环节简化传递函数来表示,这样会有很多重要环节被忽略,完全体现不了交流调速系统的整体结构和各个环节点上的信号状态。
对电气传动系统的建模仿真力求达到与实际系统相一致,Matlab提供的Simulink中的电力系统工具箱(SimPowerSystems)能很好地满足这一要求。
以往对电气传动系统的仿真研究主要集中在电机的建模和仿真,最近,许多对复杂电力传动系统的建模仿真方法已提出,主要有运用仿真工具箱对电力传动系统建模仿真和将电力传动系统的功能单元模块化的仿真建模。
由于三相异步电动机是一个多变量、强耦合非线性系统,存在着高性能上难以控制的问题。
矢量控制技术有按转子磁链定向和按定子磁链定向的控制等策略。
按转子磁链定向矢量控制给出了交流电动机的基本解耦控制方法。
在设计调速系统过程中,利用Matlab按转子磁链定向矢量控制的交流调速系统仿真,正确的应用坐标变换模块是建立转子磁链模型的基础。
第12卷 第2期2008年3月电 机 与 控 制 学 报ELE CTR IC M ACH I NE S AND CONTRO LVo l 12N o 2M ar .2008异步电机S VP WM 矢量控制仿真分析张春喜, 廖文建, 王佳子(哈尔滨理工大学电气与电子工程学院,哈尔滨150040)摘 要:为了给实际电机控制系统提供必要的设计参数,依据异步电机矢量控制理论及空间电压矢量脉宽调制原理,在M atlab /Si m u li n k 下建立了基于空间电压矢量脉宽调制的异步矢量控制仿真模型,并针对仿真中的关键问题及系统的仿真结果进行了分析。
仿真结果表明,采用该控制系统电流、转矩波动小,转速响应迅速,系统的各项指标都满足电机实际运行特性要求。
关键词:空间电压矢量脉宽调制;矢量控制;仿真;异步电机中图分类号:TM 464文献标识码:A文章编号:1007-449X (2008)02-0160-04Si m ul ation analysis i n SVP WM vector control foras ynchronous motorZ HANG Chun -x,i LIAO W en -jian , WANG Jia -zi(Co ll ege of E l ectrical and E lectron ic Eng i neer i ng ,H a rbin U n i versity of Sc i ence and T echno logy ,H arb i n 150040)Abst ract :To prov ide the necessary design para m e ters for t h e actua lm otor contro l syste m ,the si m ulation m o led of vecto r contr o l syste m based on space vector pu lse w idth m odu lation (SVP WM )fo rA sychronousM otor is estab lished inMATLAB /Si m u li n k ,acco r d i n g to t h e princ i p le o fSVP WM and the theory of vector contro l syste m.The key prob le m s and resu lts of the si m ulation w ere analyzed i n detai.l The resu lts sho w that t h is syste m has s m a ller fluct u ations of current and torque ,qu icker response speed ,and all of the in -d icato rs accord w it h the perfor m ance of t h e actualm otor .K ey w ords :space vector pulse w i d th m odu lation ;vector con tro;l si m u lation ;asynchronous m oto r收稿日期:2007-09-12作者简介:张春喜(1964-),男,博士,教授,主要研究方向电机驱动控制、开关电源;廖文建(1983-),男,硕士研究生,主要研究方向交流调速;王佳子(1983-),女,硕士研究生,主要研究方向交流调速。
异步电机SVPWM矢量控制仿真分析一、本文概述Overview of this article随着电力电子技术和控制理论的发展,异步电机(也称为感应电机)的矢量控制已成为实现高性能电机驱动的重要手段。
空间矢量脉宽调制(SVPWM)技术,作为一种先进的调制策略,在电机驱动系统中得到了广泛应用。
本文旨在探讨异步电机基于SVPWM的矢量控制方法,并通过仿真分析验证其控制效果。
With the development of power electronics technology and control theory, vector control of asynchronous motors (also known as induction motors) has become an important means to achieve high-performance motor drive. Space Vector Pulse Width Modulation (SVPWM) technology, as an advanced modulation strategy, has been widely used in motor drive systems. This article aims to explore the vector control method of asynchronous motors based on SVPWM, and verify its control effect through simulation analysis.文章首先介绍了异步电机矢量控制的基本原理,包括坐标变换、磁场定向控制等关键技术。
然后,详细阐述了SVPWM的基本原理和实现方法,包括空间矢量的合成、占空比的计算以及调制波形的生成等。
接下来,通过仿真模型的建立,对异步电机SVPWM矢量控制系统进行了仿真分析,包括启动过程、稳态运行、动态响应等多个方面。
目录1 设计任务及要求....................................................................................................... 错误!未定义书签。
2 异步电动机数学模型基本原理 ................................................................................ 错误!未定义书签。
异步电机的三相动态数学模型 ............................................................................... 错误!未定义书签。
异步电机的坐标变换 ............................................................................................... 错误!未定义书签。
三相-两相变换...................................................................................................... 错误!未定义书签。
静止两相-旋转正交变换.............................................................................................. 错误!未定义书签。
3 异步电动机按转子磁链定向的矢量控制系统 ....................................................... 错误!未定义书签。
按转子磁链定向矢量控制的基本思想 .................................................................. 错误!未定义书签。
异步电机矢量控制Matlab 仿真实验报告一.异步电机矢量控制的基本思想在转子磁场定向的基础上,经过一系列的坐标变换,实现将三相异步电机像直流电机那样对磁场和转矩的解耦控制,使异步电机的动、静态性能大大提高。
二.异步电机模型该模型状态方程:电压方程:1s s m 11s s m 12m r m r r r r 2r m m r r r r 000000i R L p L p u i R L p L p u i L p L R L p L i L L p L R L p ααββαβωωωω+⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥+⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥-+-⎢⎥⎢⎥⎢⎥+⎢⎥⎣⎦⎣⎦⎣⎦电流方程:转矩方程:e p m β1α2α1β2()T n L i i i i =-三.异步电机矢量控制的仿真模型转速给定与电机反馈转速相比较后,通过速度PI 调节器,输出定子12121112122200*001k=LsLr-Lm r S r m r m m r r m S r m r r m m s m m s r s r s m m s m r s r s i i L R L L R L L L i i L u L R L L L R L k i L u R L L L R L L L i i L L Ls R L L L R L i ααββααβαββωωωωωωωω⋅⋅⋅⋅⎡⎤⎢⎥⎡⎤-⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥---⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥----⎣⎦⎢⎥⎢⎥⎢⎥⎢⎥--⎢⎥⎣⎦⎣⎦⎣⎦⎢⎥⎣⎦Lm电流转矩分量给定1q i ,定子电流励磁分量给定1d i 由磁链PI 调节器到。
定子三相电流经过坐标变换后的1d i 与1q i 给定值相比较,再经过磁通分量PI 调节器和转矩分量PI 调节器后分别输出定子电压分量1d u ,1q u 。
实质上对电机转子磁通和转矩的控制,可以转化为对转子磁场定向坐标系下定子电流id 1、iq 1的控制。
3. 总体模块设计3.1矢量控制结构框图按照上述数学模型建立的矢量控制结构框图如实例图3.1所示。
图3.1矢量控制结构框图为了实现对电机的矢量控制,使电机满足一定的性能指标(稳定性、快速性和准确性),并尽可能使仿真模型简化,而采用电流和转速负反馈控制方式。
为了使仿真时间尽可能短并达到一定的仿真精度,选用离散控制系统。
整个系统主要分成6部分:速度控制器、矢量控制器、电流比较脉冲产生器、全桥逆变电路、异步电机和反馈回路。
其具体结构如实例图3.2所示。
图3.2矢量控制系统结构框图3.2各子系统模块3.2.1求解磁链模块图3.3求解磁链模块3.2.2 求解转子磁链角模块图3.4求解转子磁链角模块该模块是计算θ角,也就是d轴的位置3.2.3 ids*求解模块此模型的作用是根据转子磁通来计算定子电流的励磁分量i d*,模型如下所示图3.5 i ds*求解模块3.2.4 iqs*求解模块此模块的作用是计算定子电流在d、q坐标系下的q分量的给定值i qs*,其内部构造如下所示:图3.6 i qs*求解模块3.2.5 ABC到DQ坐标变换模块ABC-DQ子模块完成从ABC三相定子坐标系到d、q坐标系的变换(3/2变换),在这个模块中,根据定子电流在ABC三相定子坐标系下的分量,经过旋转变换,得出电动机定子电流在d、q坐标系下的转矩分量i qs和励磁分量i ds。
模块的构造如下图:图3.7 ABC到DQ模块3.2.6 DQ到ABC坐标变换模块DQ- ABC子模块是根据定子电流在d、q坐标系下的分量,经过旋转变换得出电动机定子的三相绕组电流的给定值i abc,变换过程如下所示图3.8 DQ到ABC模块3.3 电机参数设置图3.9 异步电动机参数表3.4矢量控制环节模块图3.10 矢量控制环节3.5矢量控制的异步电动机调速系统模块图3.11 矢量控制的异步电动机调速模块交流异步电动机矢量控制系统如上图所示,此系统为转差频率矢量控制方式,按转子磁场定向的异步电机矢量控制框图。
异步电机矢量控制M精编b仿真实验The pony was revised in January 2021基于Matlab/Simulink异步电机矢量控制系统仿真一.理论基础矢量控制系统的基本思路是以产生相同的旋转磁动势为准则,将异步电动机在静止三相坐标系上的定子交流电流通过坐标变换等效成同步旋转坐标系上的直流电流,并分别加以控制,从而实现磁通和转矩的解耦控制,以达到直流电机的控制效果。
所谓矢量控制,就是通过矢量变换和按转子磁链定向,得到等效直流电动机模型,在按转子磁链定向坐标系中,用直流电动机的方法控制电磁转矩与磁链,然后将转子磁链定向坐标系中的控制量经变换得到三相坐标系的对应量,以实施控制。
其中等效的直流电动机模型如图1-1所示,在三相坐标系上的定子交流电流iA、iB、iC ,通过3/2变换可以等效成两相静止正交坐标系上的交流isα和isβ,再通过与转子磁链同步的旋转变换,可以等效成同步旋转正交坐标系上的直流电流ism和ist。
图1-1 异步电动机矢量变换及等效直流电动机模型从图1-1的输入输出端口看进去,输入为A 、B 、C 三相电流,输出为转速ω,是一台异步电动机。
从内部看,经过3/2变换和旋转变换2s/2r ,变成一台以ism 和ist 为输入、ω为输出的直流电动机。
m 绕组相当于直流电动机的励磁绕组,ism 相当于励磁电流,t 绕组相当于电枢绕组,ist 相当于与转矩成正比的电枢电流。
按转子磁链定向仅仅实现了定子电流两个分量的解耦,电流的微分方程中仍存在非线性和交叉耦合。
采用电流闭环控制,可有效抑制这一现象,使实际电流快速跟随给定值,图1-2是基于电流跟随控制变频器的矢量控制系统示意图。
图1-2矢量控制系统原理结构图通过转子磁链定向,将定子电流分量分解为励磁分量i sm 和转矩分量i st ,转子磁链r 仅由定子电流分量i sm 产生,而电磁转矩e T 正比与转子磁链和定子电流转矩分量的乘积,实现了定子电流的两个分量的解耦。
三相异步电动机矢量控制仿真三相异步电动机矢量控制仿真***(,陕西西安710054 )摘要:借助于直流电动机的控制方法,对三相异步电动机模型进行数学分析,从三相交流电流中分别分离出励磁和转矩分量,分别对其进行控制,可以得到与直流电动机类似的控制效果,使系统机械特性可以与直流电机相类似。
并在Matlab中搭建转子磁链定向电流闭环控制矢量控制模型,通过仿真对比转速波形得出结论。
关键词:坐标变换电流闭环磁链定向矢量控制0 引言异步电机的动态数学模型是一个高阶、非线性、强耦合的多变量系统;传统的VF控制即保持电动机端电压与频率之比保持恒定。
VF控制-控制简单,通用性强,经济性好,应用于速度精度要求不十分严格或负载变动较小的场合。
从本质上讲,VF控制实际上控制的是三相交流电的电压大小和频率大小,而交流电有三要素,除了电压和频率之量控制方式、无速度传感器矢量控制方式和有速度传感器的矢量控制方式等。
这样就可以将一台三相异步电机等效为直流电机来控制,因而获得与直流调速系统同样的静、动态性能。
矢量控制算法已被广泛地应用在大量厂家的变频器上。
采用矢量控制方式的变频器不仅可在调速范围上与直流电动机相匹配,而且可以控制异步电动机产生的转矩。
1 异步电动机动态模型在研究异步电动机数学模型时,忽略部分影响微小的因素,等效为三相绕线转子,并变换为Y形连接可得三相异步电动机物理模型如图1所示。
图1 三相异步电动机的物理模型异步电动机的动态模型由磁链方程、电压方程、转矩方程和运动方程组成。
1.1磁链方程:异步电动机每个绕组的磁链是它本身的自感磁链和其它绕组对它的互感磁链之和,因此,六个绕组的磁链可用下式表示:其中L 是6×6电感矩阵,其中对角线元素AAL 、BBL 、CC L 、aa L 、bb L 、ccL是各有关绕组的自感,其余各项则是绕组间的互感。
1.2电压方程:三相定子的电压方程可表示为:方程中,AU 、BU 、CU 为定子三相电压;Ai 、Bi 、Ci 为定子三相电流;Aψ、B ψ、C ψ为定子三相绕组磁链;Rs 为定子各相绕组电阻。
三相转子绕组折算到定子侧后的电压方程为:1.3电磁转矩方程 12T e p LT n i iθ∂=∂式中,pn 为电机极对数,θ为角位移。
1.4运动方程e l p J d T T n dtω-=式中,eT 为电磁转矩;lT 为负载转矩;ω为电机机械角速度;J 为转动惯量。
2 坐标变换异步电动机三相原始动态模型相当复杂,简化的基本方法就是坐标变换。
异步电动机数学模型之所以复杂,关键是因为有一个复杂的电感矩阵和转矩方程,坐标变换即是要简化数学模型,对各个物理量之间实现解耦。
2.1 三相到两相变换三相绕组A、B、C 和两相绕组之间的变换,称作三相坐标系和两相正交坐标系间的变换,简称3/2变换。
图2 三相坐标系和两相正交坐标系中的磁动势矢量ABC和两个坐标系中的磁动势矢量,将两个坐标系原点重合,并使A轴和轴重合。
按照磁动势相等的等效原则,三相合成磁动势与两相合成磁动势相等,故两套绕组磁动势在αβ轴上的投影应相等,因此写成矩阵形式按照变换前后总功率不变,匝数比为两相正交坐标系变换到三相坐标系(简称2/3变换)的变换矩阵2.2 两相静止到两相旋转从静止两相正交坐标系αβ到旋转正交坐标系dq的变换,称作静止两相-旋转正交变换,简称2s/2r变换,其中s表示静止,r表示旋转,变换的原则同样是产生的磁动势相等。
图3 静止两相正交坐标系和旋转正交坐标系中的磁动势矢量旋转正交变换阵静止两相正交坐标系到旋转正交坐标系的变换阵旋转正交坐标系到静止两相正交坐标系的变换阵3 正交旋转坐标系下状态方程通过坐标变换可以实现电动机参数之间的部分解偶,旋转正交坐标系上的异步电动机具有4阶电压方程和1阶运动方程,选取转速、定子电流和转子磁链作为状态变量可得αβ坐标系下电机的状态方程如下。
()S s s r s mr r s r s r m r r s r m s s s s r s m r r S r s r m r r s r m s rs m r rr r r s m r r r raLp r r s r s m p L u i L L L R L R L L L T L L L dt di L u i L L L R L R L L L T L L L dt di T i L T dtd T i L T dt d J T n JL i i L n dtd σσσωψσψσσσωψσψωψψψωψψψψψωββαββααβααβαββαβαβααβ++--=++-+=++-=+--=--=2222222电磁转矩:()rr s r s m p e L i i L n T βααβψψ-=4 按转子磁链定向矢量控制系统通过坐标变换,在按转子磁链定向同步旋转正交坐标系中,得到等效的直流电动机模型。
仿照直流电动机的控制方法控制电磁转矩与磁链,然后将转子磁链定向坐标系中的控制量反变换得到三相坐标系的对应量,以实施控制将静止正交坐标系中的转子磁链旋转矢量写成复数形式r r jarctgj r r r r r j ee βαψψϕαβψψψψ=+==ψ 旋转正交dq 坐标系的一个特例是与转子磁链旋转矢量同步旋转的坐标系。
令d 轴与转子磁链矢量重合,称作按转子磁链定向的同步旋转正交坐标系,简称mt 坐标系tmαϕ1ωβrψr αr βψ图4 mt 坐标系示意图mt 坐标系中的状态方程如下:2221222121p mp st r L r m r r sm r rsm m s r r msm r sm st s r r s r s st m s r r mst r st sm s r s rs n L n d i T dt JL JL d i dt T T di L R L R L u i i dt L L T L L L di L R L R L u i i dt L L L L L ωψψψψωσσσωψωσσσ=-=-++=-+++=---+ 由导出mt 坐标系的旋转角速度mt 坐标系旋转角速度与转子转速之差定义为转差角频率mt 坐标系中的电磁转矩表达式通过按转子磁链定向,将定子电流分解为励磁分量和转矩分量,转子磁链仅由定子电流励磁分量产生,电磁转矩正比于转子磁链和定子电流转矩分量的乘积,实现了定子电流两个分量的解耦。
在按转子磁链定向同步旋转正交坐标系中的异步电动机数学模型与直流电动机动态模型相当,结构图如下图5 按转子磁链定向的异步电动机动态结构图图6 异步电动机矢量变换及等效直流电动机模型在按转子磁链定1()0rt m r st rd Li dt T ψωωψ=--+=1mstr rL i T ωωψ=+1ms str rL i T ωωωψ=-=p me st r rn L T i L ψ=向坐标系中计算定子电流励磁分量和转矩分量给定值,经过反旋转变换2r/2s和2/3变换得到三相电流。
通过电流闭环的跟随控制,输出异步电动机所需的三相定子电流。
图7 矢量控制系统原理结构图5 按转子磁链定向矢量控制系统电流闭环控制及仿真按转子磁链定向仅仅实现了定子电流两个分量的解耦,电流的微分方程中仍存在非线性和交叉耦合。
采用电流闭环控制,可有效抑制这一现象,使实际电流快速跟随给定值。
图8 电流闭环系统结构图将定子电流励磁分量和转矩分量给定值施行2/3变换,得到三相电流给定值,采用电流滞环控制型PWM变频器,在三相定子坐标系中完成电流闭环控制。
图9 电流闭环矢量控制系统结构图在matlab中搭建电流闭环矢量控制系统,设定电动机额定功率4kW,额定转速1430r/min,可得仿真模型如图10所示。
图10 转子磁链定向电流闭环控制矢量控制仿真模型在恒转矩范围内调速,磁通保持恒定、转子磁通保持额定磁通;在恒功率范围内弱磁调速,转子磁通随转速指令的增大而减小,本文中仿真为恒转矩调速,故转子磁链给定为定值,幅值为1.5。
根据三相电流和实时转速计算转子磁链的模型称为转子磁链观测器,本文模型如图11所示:图11 转子磁链观测器模型设定转速800r/min,仿真时长为0.6s,仿真算法为od23s,转速波形如图12所示,三相电流波形如图13所示。
图12 转子磁链定向电流闭环控制矢量控制电机转速波形图13 转子磁链定向电流闭环控制矢量控制电机定子电流波形6 总结转子磁链定向电流闭环控制矢量控制系统与恒压频比控制和调压调速控制相比,通过坐标变换实现了电机控制量的解耦,转速波动较小,机械特性好。
参考文献:【1】阮毅,陈伯时主编。
电力拖动自动控制系统[M].北京:机械工业出版社,2009.8 【2】李发海,朱东起。
电机学[M].北京:科学出版社,2007.6【3】马宏忠,方瑞明,王建辉。
电机学[M].北京:高等教育出版社,2009.1。