可穿戴型下肢助力机器人感知系统研究
- 格式:docx
- 大小:542.22 KB
- 文档页数:7

穿戴式下肢康复外骨骼机器人是一种近年来备受关注的医疗机器人技术,它通过运用先进的科技手段,为行动不便的人提供强有力的助力,帮助他们重新获得行走的能力。
其工作原理可以分为多个方面来探讨:1. 传感器技术:穿戴式下肢康复外骨骼机器人通过精密的传感器技术,能够实时地感知人体的运动信号和力度,从而能够根据用户的动作需求做出相应的反应。
这种技术使得外骨骼机器人能够与用户的动作实时同步,提供更加灵活和个性化的康复训练。
2. 动力学原理:外骨骼机器人内置了多种智能驱动装置和电机,能够根据传感器的反馈信息,提供相应的动力支持。
这种动力学原理使得机器人能够根据用户的需要,调整力度和速度,帮助患者更好地完成康复训练。
3. 控制算法:外骨骼机器人的控制系统采用了先进的算法,能够根据用户的运动需求,实现高度智能化的控制。
这些算法能够通过不断的学习和优化,使得机器人能够更加准确地理解用户的意图,并做出相应的动作支持。
4. 结构设计:外骨骼机器人的结构设计也是其工作原理的重要组成部分。
通过先进的材料和工艺,机器人能够在提供足够支持的保持足够的轻便和便携性,使得患者在进行康复训练时能够更加自如。
总结来说,穿戴式下肢康复外骨骼机器人的工作原理是基于传感器技术、动力学原理、控制算法和结构设计的多方面技术的综合运用。
它通过对患者的运动需求进行感知和分析,提供相应的动作支持,帮助患者进行个性化的康复训练。
个人观点上,我认为穿戴式下肢康复外骨骼机器人的出现,为康复患者提供了全新的解决方案。
它不仅为患者提供了更加个性化和有效的康复训练方式,也为医疗机器人技术的发展开辟了新的方向。
希望这种技术能够不断得到改进和推广,为更多的康复患者带来希望和帮助。
至此,对于穿戴式下肢康复外骨骼机器人的工作原理,我们进行了较为详尽的探讨。
希望通过这篇文章,你能够更深入地理解这一主题,并对其有更深刻的认识。
穿戴式下肢康复外骨骼机器人是一种对行动不便的人群具有重要意义的医疗工具。

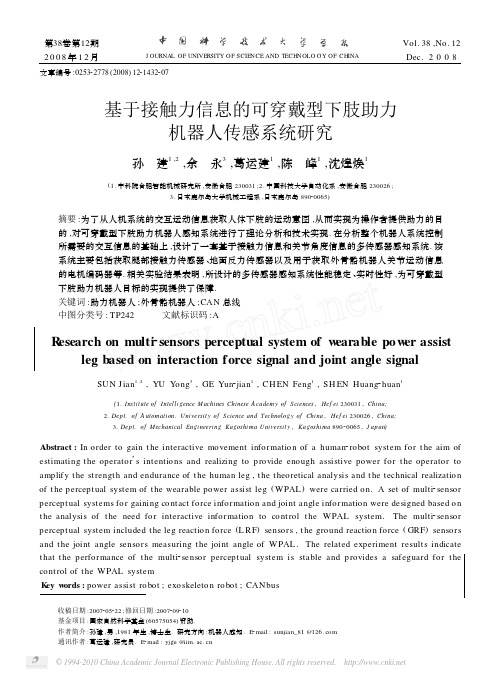
第38卷第12期Vol.38,No.122008年12月J OURNAL OF UNIVE RSITY OF SCIE NCE AND TECHNOLO GY OF CHINADec.2008文章编号:025322778(2008)1221432207收稿日期:2007205222;修回日期:2007209210基金项目:国家自然科学基金(60575054)资助.作者简介:孙建,男,1981年生,博士生.研究方向:机器人感知.E 2mail :sunjian_81@ 通讯作者:葛运建,研究员.E 2mail :yjge @基于接触力信息的可穿戴型下肢助力机器人传感系统研究孙 建1,2,余 永3,葛运建1,陈 峰1,沈煌焕1(1.中科院合肥智能机械研究所,安徽合肥230031;2.中国科技大学自动化系,安徽合肥230026;3.日本鹿尔岛大学机械工程系,日本鹿尔岛89020065)摘要:为了从人机系统的交互运动信息获取人体下肢的运动意图,从而实现为操作者提供助力的目的,对可穿戴型下肢助力机器人感知系统进行了理论分析和技术实现.在分析整个机器人系统控制所需要的交互信息的基础上,设计了一套基于接触力信息和关节角度信息的多传感器感知系统.该系统主要包括获取腿部接触力传感器、地面反力传感器以及用于获取外骨骼机器人关节运动信息的电机编码器等.相关实验结果表明,所设计的多传感器感知系统性能稳定、实时性好,为可穿戴型下肢助力机器人目标的实现提供了保障.关键词:助力机器人;外骨骼机器人;CAN 总线中图分类号:TP242 文献标识码:AR esearch on multi 2sensors perceptu al system of w earable pow er assistleg based on interaction force signal and joint angle signalSUN Jian 1,2,YU Y ong 3,GE Yun 2jian 1,CH EN Feng 1,SH EN Huang 2huan 1(1.I nstit ute of I ntelli gence M achines Chinese A cadem y of Sciences ,Hef ei 230031,China;2.Dept.of A utomation.Universit y of S cience and Technolog y of Chi na ,Hef ei 230026,China;3.Dept.of Mechanical Engineering Kagoshi ma Uni versit y ,Kagoshi ma 89020065,J apan )Abstract :In order to gain t he interactive movement information of a human 2robot system for t he aim of estimating t he operator πs intentions and realizing to provide enough assistive power for t he operator to amplify t he st rengt h and endurance of t he human leg ,t he t heoretical analysis and t he technical realization of t he percept ual system of t he wearable power assist leg (WPAL )were carried on.A set of multi 2sensor percept ual systems for gaining co ntact force information and joint angle information were designed based on t he analysis of t he need for interactive information to cont rol t he WPAL system.The multi 2sensor percept ual system included t he leg reactio n force (L RF )sensors ,t he ground reaction force (GRF )sensors and t he joint angle sensors measuring t he joint angle of WPAL.The related experiment result s indicate t hat t he performance of t he multi 2sensor percept ual system is stable and p rovides a safeguard for t he control of t he WPAL systemK ey w ords :power assist robot ;exoskeleton robot ;CANbus0 引言随着全球老龄化问题的加剧,越来越多的老年人需要照料,开发出一些操作简单、价格合理的智能机械装置用于辅助老年人以及残疾人,帮助他们照料自己或者进行康复训练无疑是解决目前老龄化问题的一个有效措施.外骨骼机器人就是帮助老年人或者残疾人扩展上肢和下肢运动能力的智能辅助机械装置.目前,世界上大约有十余家实验室从事外骨骼机器人方面的相关研究,其中日本和美国走在前列,而国内还没见相关报道.我们所开发的可穿戴型下肢助力机器人是外骨骼机器人的一种[1,2],其基本原理是:在基于人体运动行为意识信息的基础上,由安装在外骨架的伺服电机驱动关节运动,通过各关节角度、速度值的改变来达到与人体的协调运动并提供助力,降低人在负重或长时间行走的情况下的运动强度,对那些有异样运动行为的人提供治疗和矫形,与人体组成了一个协调而且完美的整体.Hardiman[3]是世界上第一个全身型外骨骼机器人,重达3300kg,包含30个自由度,其机械结构采用可穿戴重叠式外骨架结构(内、外两层外骨架结构).由于体积和重量过于庞大、机械操作非常复杂,腿部难以进行协调运动,导致整个机器人系统不能实现无支撑的自主平衡运动.美国加州大学伯克利分校Kazerooni等在2004年公布的“伯克利下肢外骨骼”(Berkeley lower ext remity exoskeleton, BL EEX)[4,5]是世界上第一个能够背负载荷和实现真正意义上完全自治式的外骨骼机器人[4],能够使穿戴者很轻松地背起34kg的重物,以每小时415 km的步行速度行走.由于BL EEX的设计初衷是军事用途,对操作者的健康程度要求过高,并不适合老年人或者残疾人.日本Tsukuba University San Kai 实验室在2005年研制开发了机器人装混合助力腿(hybrid assistive limb,HAL25)[6,7],是世界上第一个实现商品化的全身型外骨骼机器人.它全身重达23kg,基本可以使佩戴者轻松地完成行走、站立以及爬楼梯等动作.但是,HAL25采用EM G传感器作为主要的感知系统,导致其穿戴极不方便,并且由于其采用直流电池作为动力源,导致工作时间过短,实用价值大为降低.在外骨骼机器人的控制中,人体运动意图的获取是必不可少的一个重要环节[3],而其获取的速度以及准确性直接影响整个机器人系统控制的有效性.在人体和外骨骼的接触信息中,肌电信息和力信息是估计人体运动意图最可靠的两种运动信息[8].由于测量肌电信息的传感器是根据肌肉活动时皮肤表面传送的微弱电流信号或肌肉的软硬程度来推断人的行为意识,所采用的大部分传感器要与人体肌肤直接接触,需要特别的固定装置,这样直接导致外骨骼机器人穿戴上的不方便;人体分泌的汗液、传感器安装的好坏等将影响所获取信息的稳定性和准确性,而且信息量大而复杂,易受干扰,从而使控制难度加大.因此,本文设计了一套多传感器感知系统用于获取人体下肢和机器人外骨骼之间的接触力信息,利用这些力信息控制机器人外骨骼以实现对人体下肢运动的助力.1 机器人整体系统设计整个机器人系统主要包含四个部分:外骨架、动力装置、控制单位以及多传感器感知系统.考虑到人体穿戴舒适等因素,机器人外骨架必须包含足够的自由度,而其长度必须与人体下肢长度保持一致.因此,外骨架本身被设计成包含12个自由度,即每条腿包含6个自由度,髋关节包含3个自由度(矢状面、冠状面以及水平面各一个自由度),膝关节、踝关节和脚底各包含1个自由度;外骨架的长度也可以根据不同穿戴者身高进行调节.该设计不仅符合以往的拟人机器人行走机构的设计要求,而且达到了与人体腿部运动相协调、互不产生运动干涉的设计要求.整个机器人系统采用直流电机作为动力装置,每条腿包含2个MAXON直流电机和配套的谐波减速器,分别安装在外骨架的髋关节和膝关节上,用于驱动人体下肢髋关节和膝关节在矢状面的运动,而髋关节其他自由度以及踝关节自由度均为被动驱动自由度.为了使整个机器人硬件系统穿戴更加方便,把整个系统硬件控制器单元、电机控制器、动力装置以及传感器接口卡等装置集中在一起放在外骨架的背部.2 多传感器感知系统设计2.1 感知系统整体设计设计的外骨骼机器人感知系统主要包括安装在外骨架膝关节和踝关节用于测量关节角度的四个电机编码器、安装在膝关节和踝关节上端用于测量腿部和外骨骼之间接触力信息的4个二维力传感器(leg reaction force,L RF)以及安装在脚底用于测3341第12期基于接触力信息的可穿戴型下肢助力机器人传感系统研究量人体脚底对外骨架作用力的6个一维力传感器(floor reaction force ,FRF ).如图1所示,外骨骼机器人通过安装在L RF 传感器的金属固定装置和人体下肢进行连接,而对人体的助力通过L RF 的金属固定装置传递给人体腿部.如图2所示,L RF 传感器被设计成两维力传感器(见图3),用于测量人体腿部和外骨骼在矢状面内沿腿部方向的接触力(F x )和垂直于腿部的接触力(F y ),其测量信息的准确性和稳定性对于外骨骼机器人的控制至关重要.图1同时给出了L RF 传感器的具体安装位置,每条腿包含2个L RF 传感器,一个安装在膝关节的上端,另一个安装在踝关节的上端.在下肢助力机器人的控制中,除了要知道人体腿部与机器人的作用力之外,还需要知道人体脚底对机器人的作用力,而FRF 传感器是测量地面对人机系统的反作用力.人体落脚对地面的着力点可以用三个支撑点表示,这三个支撑点的位置分别位于第一跖骨根部和第五跖骨根部以及后脚跟[9],人体靠这三点间产生的足弓支撑身体,而身体的重量经由这三点传递到地面.为了准确获取行走时脚底的力信息,脚底力传感器的安装位置固定在这三点位置上,每只脚需要安装3个一维力传感器,共需要6个,具体安装位置见图4.由于脚底机械部分的限制,传感器弹性体体积比较小,其本体机械尺寸 40mm ×8mm ,量程为1000N.图4 FRF 传感器实物安装图Fig.4 The installation of FRF sensors2.2 感知系统硬件设计弹性体的设计是多维传感器设计的关键[10].在利用有限元分析方法对传感器弹性体的静态和动态特性仿真分析的基础上,L RF 和FRF 传感器均采用一种基于E 型膜片的弹性体结构,这种结构的传感器具有结构简单、灵敏度高、维间耦合小、容易标定的特点.整个弹性体主要由弹性膜片、应变片和受力转接体三个部分组成,实现对X 和Y 两个方向应变力的测量.弹性膜片为圆形结构,其直径和厚度分别为15mm 和2mm ,厚度方向和测量方向一致.传感器的输出值是E 型膜片的应力,应力的测量方式很多,本研究采用箔式电阻应变片,应变片粘贴在E 型膜片上,用于测量弹性体上应力的大小.如图5所示,LRF 传感器F x 和F y 方向四片应变片电阻组成一个惠斯通全桥电路,实现输出信号的自动解耦[11].当外骨骼系统和人体下肢的接触力作用于传感器时,由于力的大小、方向不同,L RF 和FRF 传感器各个方向的敏感电阻受到的应力不同,从而得到力与应变之间的关系.为了便于说明问题,以F x 方向为例,由于E 型膜片敏感弹性部分的圆环平膜片属于薄板结构,在F x 的作用下,边界条件比较简4341中国科学技术大学学报第38卷图5 应变计惠斯通全桥电路布局Fig.5 A wheatstone bridge electric circuit单,可以等效为外圆周固定,集中应力作用在硬中心的圆形薄板.根据薄板理论[12]可知,周边固支具有硬中心的膜片在半径r处的径向应力εr和切向应力值εθ为εr=-h2d2ωd r2=f(r)×F(1)εθ=-h2r dωd r=P(r)×F(2)式中,ω,h分别是圆环膜片的法向位移和厚度,F 为施加力的等效集中力,f(r),P(r)是仅与r有关的函数.由上式可以看出,当半径r一定,也就是压敏电阻位置固定时,有下式成立ε=kF×F(3)式中,ε为圆形膜片表面上的应变,K F为应变系数常量.由于使用等臂电桥,即R1=R2=R3=R4,则有U Z=U4G(ε1-ε2+ε3-ε4)(4)U Z=U4G×ε=K×ε(5)式中,ε1,ε2,ε3,ε4分别是四个敏感电阻R1,R2,R3和R4的应变,ε为圆形膜片的总应变,G,K为常量, U Z是桥路输出电压.综合式(4)和(5),桥路的输出电压信号正比于传感器的力信号,测量输出电压信号就可以得到被测目标的力信号.为了使传感器能够安装在弹性体的外围空腔内,L RF和FRF传感器的数据采集系统的硬件体积应尽可能地小,这不仅要求芯片的体积小,还要求芯片的功能强、集成度高、工作稳定可靠.L RF和FRF传感器的数据采集系统的硬件由数字电路和模拟电路两部分组成,其中模拟电路由信号调零电路、运算放大电路和模拟滤波电路以及电源电路组成;数字电路部分主要包括C8051F040,A/D采样模块、数字计算模块、CAN总线控制器、CAN总线驱动器和必要的外围电路模块.图6是L RF和FRF 传感器的数据采集与处理系统的硬件电路原理图.图6 传感器数据采集与处理系统硬件电路原理图Fig.6 The hardw are circuit of the L RFand GRF force sensors在L RF和FRF传感器硬件电路中使用了Silicon Laboratories公司的C8051F040单片机,它是一款完全集成的混合信号系统级芯片,本身集成了ADC,DAC,比较器,定时器,PWM等外设以及CAN,SPI,SMBU S和UAR T等接口总线硬件电路.L RF传感器电路使用了C8051F040的9路12位ADC0转换器中的4路来完成经过模拟处理后的膝关节和踝关节两个2维力传感器输出信号的模数转换,而FRF传感器电路使用了其中的3路ADC0 (每个脚底包含三个一维力传感器),P3口用在数据总线,ADC0参考电压为C8051F040自身参考电压(2143V),使用CAN总线作为通讯接口(C8051F040本身包含CAN总线控制器)与上位机进行通讯.模拟信号处理电路部分的主要功能是对传感器输出的信号进行预处理,对传感器的信号进行检测、放大、滤波等.L RF和FRF传感器硬件电路要求外界提供1组12V,012A的电源,而电源电路将输入电压稳定为2组5V电源,其中一组提供给数字电路,另一组提供给模拟电路.考虑到放大器的灵敏度、温漂以及抗干扰能力等因素,设计的力传感器运算放大电路采用单电源、满幅度输出的仪表放大器(INA122),增益选择在850左右.L FR和FRF传感器要测量的力不仅有大小,而且有方向,即传感器输出有正负.信号调零电路将1125V作为虚拟零点,当输出大于1125V时认为传感器受到正方向的力;当输出小于1125V时,传感器受到负方向的力.传感器硬件电路采用了巴特沃斯低通滤波5341第12期基于接触力信息的可穿戴型下肢助力机器人传感系统研究器电路对模拟信号进行滤波,并按照系统的要求选择合适的截至频率.多维传感器E型膜片元件本身结构的复杂性使得产品特性的一致性比单维传感器更难保证,应变计的贴片工艺很难保证绝对理想,这些因素决定了传感器的实际静态特性和理论计算值之间存在一定的误差.当某一力分量(某方向输入量)作用在传感器上时,可能会产生其他力分量方向的输出信号,即产生维间耦合误差.为了消除或者减少维间耦合误差,提高测试精度,传感器的静态特性一般采用标定实验的方法获取,其标定准确度将直接影响传感器使用时的测量准确度.所谓传感器的标定,就是建立传感器的物理量或者数字量输出值与作用在传感器坐标系原点上的多维力之间的数量关系.标定实验过程包括静态标定和实时测量验证两部分.为了减少随机误差的影响,采用具有一定冗余力向量的最小二乘标定方法.设F是加载力矩阵,V为传感器的输出矩阵(数字量),C为标定矩阵,E为误差矩阵,有如下的关系式成立F=C V+E(6)式中,F,V为已知量,E可以设定.于是,标定矩阵的求解可以转化为:求解标定矩阵C,使得式(6)在最小二乘法意义下最优.标定装置采用实验室的传感器标定平台、砝码式加载,以标准计量局提供的增坨作为标注重物,通过软绳和加载帽将力加到L RF传感器力敏感元件上,使其2个弹性体产生微应变而获得2路输出电压信号,这2路输出信号经应变放大器和A/D板送入计算机,经处理后得到标定矩阵. 2.3 CAN总线通讯系统设计可穿戴型下肢助力机器人系统采用CAN总线作为整个系统的通讯方式.感知系统中的每个传感器都被看作一个通信节点.通过CAN总线可以将各个传感器节点与上位机控制器组网,控制器节点通过CAN总线获取每个L RF,FRF传感器采集到的运动信息以及电机码盘反馈的位置角度信息,从而达到对人机混合系统的运动状态进行实时监控的目的.由于传感器节点采集到的数据通过总线传递到控制器节点,反馈回路中的数据传输延时使得机器人控制器系统无法实时获得被控对象的状态信息.同样,控制器节点产生的控制信号必须通过CAN总线传递到执行器节点,传输延时的存在使得控制信号亦无法及时作用于被控对象.这种情况下,数据传输延时即感知系统采集的实时性问题变为影响系统性能和破坏系统稳定性的主要因素.因此,感知系统采用一种动态和静态(固定)相结合的混合调度方法,用于调度系统总线中传输的消息,补偿传输延时,基本解决了感知系统采集的实时性问题.从实时性角度考虑,在复杂的实时系统中,消息可以分为实时消息和非实时消息,实时消息又可以分为硬实时消息和软实时消息.感知系统每个传感器节点能够完成清零点、力信息(标定)、回传采样数据、查询力信息、屏蔽报警和握手等功能,其中查询力信息、清零点以及屏蔽报警属于实时消息,而力信息(标定)、握手、回传采样数据被归结为非实时消息.利用动态调度方法对硬实时消息进行调度,而利用比例单调用静态优先级调度方法对非实时消息进行调度.系统运行时,由控制器节点发送一个同步消息,使系统中各传感器节点能够同步.然后每隔一固定时间间隔感知系统各传感器节点,同时对硬实时消息进行优先级标识符进行重新编码,改变消息发送的顺序,而非实时消息的标识符保持不变,按照发送要求进行消息的发送.整个感知系统通讯方式采用CAN210A,高8位包括上位机节点(4位)和传感器从节点(4位),低3位用作命令ID,编码格式如表1所示.上位机节点采用固定编码0000B,传感器本节点编码1XXXB.CMDID命令编码使用CAN ID 中的低3位(ID02ID2),用来设置控制器主节点(上位机)发送给传感器从节点(下位机)的命令.表1 CANID编码格式T ab.1 CANID code formID10ID9ID8ID7ID6ID5ID4ID3ID2ID1ID0R TR DL C3DLC2DL C1DLC0D72D0数据区,一帧中含有8个字节,使用一个字节2.4 感知系统软件设计软件设计分为下位机(微处理器)的软件设计和上位机(PC)的软件设计.每个传感器作为一个节点通过CAN总线互联,当接收到上位机的命令后,首先进行命令判断,根据不同的命令作出相应的数据处理.上位机(PC)主要包括清零点、力信息(数字量)、回传力信息、查询力信息、屏蔽报警等命令.下位机的软件设计主要由数据采集程序(A/D转换)、数据处理程序以及CAN总线通信程序三大部分组成.启动CAN中断以前,在主程序中进行一次数据采集,得到传感器系统的初始值,这其中包括A/D 转换通道、延时、完成通道的初始化;数据采集是在6341中国科学技术大学学报第38卷CAN中断程序中完成的,每一次中断完成一组力信息数据(腿部4个力传感器和脚底6个力传感器)的采集以及相应的A/D转换;同时读取转换结果,对转换结果进行数字处理.数字处理主要由数字滤波与力信息解耦两大部分组成,数字滤波主要采用窗口移动法与数据平均值法相结合;数据经过解耦处理后,通过SendData()函数,将数据发送到CAN 总线上,上位机通过ID识别接受下位机数据,具体流程如图7所示.图7 下位机程序设计流程图Fig.7 The concrete softw are flow of the sensors3 相关实验及其实验结果在力传感器的标定过程中,对施加在传感器上X,Y方向的载荷和敏感桥路之间的关系进行测量,其测量值(数字量)与所加砝码数值的对应关系如图8(a)和(b)所示.从图8可以看出,传感器X方向加力时,所受载荷和传感器敏感桥路输出之间的映射关系可以基本认为是线性的,Y方向的最大耦合不超过215%.利用最小二乘法得到传感器的静态标定矩阵并对传感器进行实时测量检验,结果显示Ⅰ类最大误差不超过2%,Ⅱ类误差不超过215%.通过该标定系统得到的静态标定矩阵与理论设计值比较接近,说明标定系统和标定方案是切实可行的.为了验证所设计的感知系统的有效性,以外骨骼机器人的右腿为实验对象,利用力/速度控制方法对外骨骼机器人进行控制,关于该控制方法的研究详见文献[1,2].通过相应的传感器对人体小腿与外骨骼机器人的接触力和外骨骼机器人膝关节角速度以及人体大腿与外骨骼机器人的接触力和外骨骼机器人髋关节角速度信息进行采样,实验结果如图9所示.从图9可以看出,人体的运动也被分解成两个基本动作的组合(摆动阶段和支撑阶段),而动作之间的过渡是根据速度方向的变化进行判断.该实验把助力系统的运动分为过渡阶段(跟随阶段)和助力阶段.过渡阶段是外骨骼机器人跟随人体下肢运动阶段,助力阶段是外骨骼机器人对人体下肢提供力矩阶段.在某一元动作内,过渡阶段所站的时间越短,外骨骼机器人对人体提供的助力力矩越多;反之,助力阶段所站的时间越短,外骨骼机器人对人体提供的助力力矩越少.通过调节过渡阶段和助力阶段时间,进而改变助力比.事实上,该力/速度控制方法的核心就是在条件允许下,尽量减少过渡阶段时间,增加助力阶段时间.该方法建立了速度信号和外骨骼机器人与人体接触力之间的关系,通过测量接触力确定电机速度命令,进而实现对人体提供力矩的目的.实验表明,力/速度控制方法存在一些弊端,图8 载荷与传感器输出数字值关系图Fig.8 The m apping relations of the load and output value7341第12期基于接触力信息的可穿戴型下肢助力机器人传感系统研究图9 接触力、速度数值变化曲线图Fig.9 The experiment results of the leg hip(force and angle speed)主要有:(Ⅰ)仅仅考虑到人机系统动力学信息(主要是人机系统接触力信息),而没有考虑人体下肢的运动学信息,因此在实验中由于外骨骼机器人与人体运动位置的差异,导致人体在某些时刻感觉不舒服; (Ⅱ)速度方向的变化是借助于接触力阈值进行判断的,而该阈值的确定相对困难,必须通过实验确定,这样便会产生一个问题:为了确定阈值,不同的穿戴者必须进行多次实验.4 结论本文针对一种新型的外骨骼机器人,设计一套基于CAN总线的下肢运动信息感知系统.通过分析可穿戴型助力机器人所需要的控制信息,确定传感器的种类、数量和安装位置;重点分析了腿部和脚底力传感器的弹性体设计、测量电路和上、下位机软件;并对传感器进行相关实验和对数据进行分析,给出了L RF和FRF传感器的一般性能指标,结果表明,本文的设计理论和设计过程是正确的,基本可以满足可穿戴型下肢助力机器人控制系统的需要.致谢 感谢实验室马军和王以俊高级工程师所做的工作.参考文献(R eferences)[1]Chen F,Yu Y,Ge Y J.Dynamic model and motioncontrol analysis of the power assist intelligence leg[C]//Proceeding of the6th World Congress onIntelligent Control and Automation.Dalian,China: IEEE Press,2006,2:643626440.[2]Chen F,Yu Y,Ge Y J,et al.A PAWL for enhancingstrength and endurance during walking using interaction force and dynamical information[C]//IEEE Conference on Robotics and Biomimetics.INSPEC, 2006:6542659.[3]Mosher R S.Force reflecting electrohydraulicservomanipulator[J].Electro2Technology,1960,71: 1382141.[4]Kazerooni H,Racine J L,Huang L H,et al.On thecontrol of the Berkeley lower extremity exoskeleton (BL EEX)[C]//Proceeding of the IEEE International Conference on Robotics and Automation.Barcelona, Spain:IEEE Press,2005:435324360.[5]Chu A,Kazerooni H,Z oss A.On the biomimeticdesign of the Berkeley lower extremity exoskeleton (BL EEX)[C]//Proceeding of the IEEE International Conference on Robotics and Automation.Barcelona, Spain:IEEE Press,2005:434524352.[6]Kawamoto H,Kanbe S,Sankai Y.Power assistmethod for HAL23estimating operatorπs intention based on motion information[C]//Proceedings of IEEE International workshop on Robot and Human Interactive Communication.California:IEEE Press, 2003:67272.[7]K im S H,Sankai Y.Stair climbing task of humanoidrobot by phase composition and phase sequence[C]//Proceedings of IEEE International Workshop on Robot and Human Interactive Communication.Barcelona, Spain:IEEE Press,2005:5312536.[8]K iguchi K,Kariya S,Watanabe K,et al.Anexoskeletal robot for human elbow motion support2 sensor f usion,adaptation,and control[J].IEEE Transactions On Systems,Man,And cybernetics, Partb,2001,31(3):3532361.[9]吴宝元,余永,许德章,等.可穿戴式下肢助力机器人运动学分析与仿真[J].机械科学与技术,2007,26(2):2352240.[10]金振林,赵现朝,高峰.新型灵巧手指六维力传感器参数设计方法研究[J].仪器仪表学报,2003,24(4): 3712374,413.[11]刘广玉,陈明,吴志鹤,等.新型传感器技术及应用[M].北京:北京航空航天大学出版社,1995.[12]孙旺强.基于三维加速度计数字铅球的设计与应用研究[D].硕士论文,中科院合肥智能机械研究所,2005.8341中国科学技术大学学报第38卷。

《可穿戴式膝关节力反馈外骨骼助力系统研究》一、引言随着科技的不断进步,可穿戴式设备在医疗康复、运动辅助以及日常生活中的助力作用日益凸显。
其中,可穿戴式膝关节力反馈外骨骼助力系统作为一种新型的辅助技术,在帮助患者康复、提高运动表现以及改善生活质量等方面具有巨大的应用潜力。
本文旨在研究可穿戴式膝关节力反馈外骨骼助力系统的原理、设计、应用及未来发展,为相关研究提供参考。
二、系统原理与技术背景可穿戴式膝关节力反馈外骨骼助力系统主要通过传感器、控制器和执行器等组件,实现对膝关节的力反馈和辅助支撑。
该系统利用先进的机械设计、材料科学、控制理论以及人工智能等技术,实现对膝关节运动状态的实时监测和调整,以达到辅助用户完成运动的目的。
三、系统设计1. 硬件设计:系统的硬件部分包括传感器模块、控制器模块、执行器模块以及供电模块等。
传感器模块负责实时监测膝关节的运动状态和力反馈信息;控制器模块则负责处理传感器数据,并根据预设算法输出控制指令;执行器模块则根据控制指令驱动外骨骼进行相应的动作;供电模块则为整个系统提供稳定的电源。
2. 软件设计:软件部分主要包括控制系统算法和人机交互界面。
控制系统算法负责处理传感器数据,并根据预设的算法进行计算,输出控制指令;人机交互界面则用于实现用户与系统的互动,如设置参数、调整模式等。
四、应用领域1. 医疗康复:可穿戴式膝关节力反馈外骨骼助力系统可用于帮助患者进行康复训练,如膝关节损伤、中风后偏瘫等。
通过系统的辅助,患者可以更快地恢复膝关节功能,提高生活质量。
2. 运动辅助:该系统也可用于运动员的训练和比赛中,帮助他们提高运动表现。
例如,在长跑、举重等运动中,系统可以提供额外的支撑和力反馈,帮助运动员更好地完成动作。
3. 日常生活助力:对于老年人或行动不便的人群,该系统可以提供日常生活中的助力,如上下楼梯、行走等。
通过系统的辅助,他们可以更轻松地完成日常活动。
五、实验与结果分析通过对可穿戴式膝关节力反馈外骨骼助力系统进行实验验证,发现该系统在医疗康复、运动辅助以及日常生活助力等方面均具有显著的效果。

《可穿戴式膝关节力反馈外骨骼助力系统研究》篇一一、引言随着人口老龄化的加剧和人们对于健康生活需求的提高,可穿戴式膝关节力反馈外骨骼助力系统逐渐成为研究的热点。
该系统通过对外骨骼的机械设计与控制算法的优化,为人类提供辅助支撑与力反馈,以增强膝关节的稳定性和减轻人体在行走、运动过程中的负担。
本文旨在研究可穿戴式膝关节力反馈外骨骼助力系统的设计原理、实现方法及其应用前景。
二、研究背景及意义可穿戴式外骨骼系统作为一项前沿技术,近年来在康复医学、体育训练和辅助设备等领域取得了显著的成果。
尤其在助力系统中,其通过模拟人体肌肉运动原理,为人体提供辅助支撑,有效减轻了人体在运动过程中的负担。
而膝关节作为人体运动的重要关节,其稳定性和灵活性对于人体行走、跑步等运动至关重要。
因此,研究可穿戴式膝关节力反馈外骨骼助力系统具有重要意义。
三、系统设计原理1. 机械结构设计可穿戴式膝关节力反馈外骨骼助力系统的机械结构设计主要包括外骨骼框架、驱动装置、传感器等部分。
其中,外骨骼框架需根据人体工学原理进行设计,确保与人体膝关节的贴合度;驱动装置则负责提供动力,驱动外骨骼进行运动;传感器则用于实时监测人体的运动状态,为控制算法提供数据支持。
2. 控制算法设计控制算法是可穿戴式膝关节力反馈外骨骼助力系统的核心部分,其通过对外骨骼的运动状态进行实时控制,实现力反馈和辅助支撑。
常用的控制算法包括基于模型的控制算法、基于学习的控制算法等。
这些算法需根据具体应用场景进行优化,以实现最佳的控制效果。
四、实现方法1. 材料选择可穿戴式膝关节力反馈外骨骼助力系统的实现需要选用轻质、高强度的材料,如碳纤维复合材料、轻质合金等,以确保系统的轻量化和耐久性。
2. 制造工艺制造工艺方面,需采用先进的加工技术和装配工艺,确保外骨骼框架的精度和稳定性。
同时,还需对驱动装置、传感器等部件进行精密的调试和校准,以确保整个系统的性能稳定可靠。
五、应用场景及效果可穿戴式膝关节力反馈外骨骼助力系统在康复医学、体育训练和辅助设备等领域具有广泛的应用前景。

下肢助力外骨骼机器人研究随着科技的不断进步,机器人技术已经越来越广泛地应用于各个领域。
其中,下肢助力外骨骼机器人作为一种辅助人体行走的外骨骼装置,受到了越来越多的。
本文将介绍下肢助力外骨骼机器人的研究背景、现状、技术原理及实现方法,以及应用领域和未来发展。
下肢助力外骨骼机器人是一种可穿戴的智能设备,它通过仿生学原理和机械结构设计,为穿戴者提供额外的支撑和助力,从而减轻行走时的负担。
这种外骨骼机器人对于那些需要长时间行走或者负重工作的人群,以及下肢损伤或疾病的康复治疗具有重要的意义。
随着人口老龄化的加剧,下肢助力外骨骼机器人还有着广阔的老年护理市场前景。
下肢助力外骨骼机器人的研究可以追溯到20世纪末,至今已经经历了多个阶段的发展。
目前,下肢助力外骨骼机器人已经在临床应用上取得了一些显著的成果。
例如,在军事、工业和康复医学等领域,已经有一些原型机或者商业产品投入使用,并得到了良好的反馈。
同时,学界对于下肢助力外骨骼机器人的研究也在不断深入,涉及到机械设计、控制系统、人工智能等多个方面。
下肢助力外骨骼机器人的技术原理主要包括仿生学、机械动力学、传感技术、控制算法等。
其实现方法通常包括关键零部件的设计与制造、机构优化与调试、传感器采集与处理、控制算法设计与实现等步骤。
下肢助力外骨骼机器人的核心部分包括腰部、大腿杆、小腿杆和脚踝等部位的设计。
这些部位通过仿生学的原理,模仿人体下肢的动作规律,从而实现与人体运动协同的外骨骼机器人。
在仿生学的基础上,通过机械动力学的研究,可以进一步优化机器人的负载能力和效率。
同时,利用先进的传感技术,可以实时采集穿戴者的运动信号并反馈给控制系统,从而实现精准的控制。
下肢助力外骨骼机器人具有广泛的应用领域。
在军事方面,下肢助力外骨骼机器人可以帮助士兵在行军过程中节省体力,提高作战能力。
在工业生产中,下肢助力外骨骼机器人可以帮助工人进行重物搬运等体力劳动,提高生产效率。
在康复医学领域,下肢助力外骨骼机器人可以帮助患有下肢损伤或疾病的人进行康复训练,加速恢复。
智能下肢假肢感知与控制关键技术研究的开题报告一、项目背景与意义随着生活水平的提高,健康意识的增强,人们对于身体损伤的治疗、康复、辅助的需求不断增加。
特别是因为各种原因造成下肢瘫痪的患者,生活、工作、学习等方面都面临很大的困难。
因此,研究智能下肢假肢感知与控制关键技术,对于失去下肢或下肢功能丧失的患者来说,提供了一种良好的康复方式,既能帮助他们恢复正常的下肢功能,又能提高他们的生活质量和自理能力。
二、研究目标本项目的目标是开发一种能够感知人体运动意图、实现自然步态的智能下肢假肢。
具体包括以下方面:1.研究下肢感知技术。
通过生物力学与信号处理等方面的研究,建立下肢运动的数学模型,实现对人体运动意图的感知。
2.研究步态控制技术。
通过控制算法的研究,实现对假肢的控制,使得假肢能够实现自然的步态。
3.研究下肢假肢材料。
根据生物力学控制和步态特点,选取合适的材料进行假肢制造。
三、研究内容1.下肢运动数据采集与识别技术研究对下肢运动进行数据采集,并基于生物力学理论研究建立下肢运动的数学模型。
在此基础上,开发出合理的信号处理算法,实现对人体运动意图的感知。
2.步态控制算法研究基于下肢运动的数学模型,研究步态控制算法。
通过对假肢的控制,实现自然步态,尽可能使得假肢运动与自然步态一致。
3.智能下肢假肢制造技术研究根据生物力学控制和步态特点,选取合适的材料进行假肢制造,达到轻盈、耐用、舒适的效果。
同时,结合假肢的功能和形状设计,实现人体工程学方面的优化。
四、预期成果通过本项目的研究,预计达到以下成果:1.下肢运动数据采集与识别技术实现。
通过对下肢运动数据的采集识别,实现对人体运动意图的感知。
2.步态控制算法的设计与实现。
根据下肢运动的数学模型,设计并实现出高效的步态控制算法。
3.智能下肢假肢的研制和制造。
根据人体工程学方面的优化,选取合适的材料制造出轻盈、耐用、舒适的智能下肢假肢,实现自然步态。
五、进度安排本项目的研究时间为2年,预计进度安排如下:第1年1.下肢运动数据采集与识别技术实现2.步态控制算法的设计与实现第2年1.智能下肢假肢制造技术实现2.实现智能下肢假肢的实验验证六、经费预算本项目的经费预算为50万元,包括设备采购费、人员费、材料费等。
穿戴式下肢外骨骼助行器的研究与应用摘要:对穿戴式下肢外骨骼助行器的研究,在设计和开发上提出新的思路。
在设计中应注重低功耗,穿戴舒适轻便,高安全性等性能,将会给下肢神经受损患者带来更多的方便。
穿戴式下肢外骨骼助行器作为康复辅具中新兴的移动辅具,具有广阔的市场前景,在下肢瘫痪和膝关节活动受限患者中起到了积极的辅助治疗作用。
关键词:下肢外骨骼;助行器;康复应用穿戴式下肢外骨骼助行器是在机械外骨骼基础上发展而来,它是机械外骨骼在康复领域中具体应用的体现。
主要是应用于下肢功能性障碍,或活动能力丧失依赖于助行器使用的人群。
1.穿戴式下肢外骨骼助行器的由来其实“外骨骼”的概念最初来源于昆虫的外骨骼,是指为生物提供保护和支持的坚硬的外部结构[1]。
人们利用仿生学原理,在人体外穿上能提供某种相应帮助的装备,如提供保护不受外来伤害,助行,负重或提供动力增强人体某种技能等。
在康复领域,则简化了构造,只需要机械外骨骼的下肢部分来帮助那些下肢功能性障碍的人们,让他们重新站起并移动。
2.穿戴式下肢外骨骼助行器的构成穿戴式下肢外骨骼助行器要实现带动患者模拟正常人行走动作的功能,从结构上讲,包含以下几部分:具有支撑身体的机械结构,包括腰部以上起辅助支撑的装置,腰部以下连接各关节的连接部件;具有驱动能力的髋关节、膝关节和踝关节。
从功能上讲,包括下肢连接机械部件,动力输出装置及执行部分,控制系统和能源系统。
3.穿戴式下肢外骨骼助行器的研究方向3.1.步态控制研究对正常人体行走时的步态分析是人类穿戴式下肢外骨骼助行器设计的一个重要研究方面[2]。
由于人体穿戴式下肢外骨骼助行器需要辅助人体的承载并跟随人体一同活动,故对外骨骼的设计必须考虑外骨骼与操作者之间动作的协调性和一致性,且应与人体下肢具有相同的关节活动度。
对于步态控制,目前主要有操作者自行控制、肌电传感器控制、灵敏度放大控制[3]等方法;其中操作者自行控制主要用于下肢功能完全丧失的患者,他们可以采用上肢的活动来控制。
可穿戴型下肢助力机器人感知系统研究1引言可穿戴型下肢助力机器人是辅助型康复机器人的一种,是一种帮助人们扩展下肢运动能力的助力装置,其基本原理是在基于人体运动行为意识信息的基础上,由安装在腿部关节(髋关节及膝关节)处的伺服电机驱动关节运动,通过各关节角度、速度值的改变来达到与人体腿部的协调运动并提供助力,降低人在负重或长时间行走情况下的运动强度,对那些有异样运动行为的人提供治疗和矫形,与人体组成了一个协调而且完美的整体。
目前,世界上大1 引言可穿戴型下肢助力机器人是辅助型康复机器人的一种,是一种帮助人们扩展下肢运动能力的助力装置,其基本原理是在基于人体运动行为意识信息的基础上,由安装在腿部关节(髋关节及膝关节)处的伺服电机驱动关节运动,通过各关节角度、速度值的改变来达到与人体腿部的协调运动并提供助力,降低人在负重或长时间行走情况下的运动强度,对那些有异样运动行为的人提供治疗和矫形,与人体组成了一个协调而且完美的整体。
目前,世界上大约有10余家实验室从事可穿戴型人体助力机器人的研究,其中日本和美国走在前列,国内尚未见相关报道。
日本筑波大学(Tsukuba University)在2002年研制开发了机器人装混合助力腿(hyhrid assis-tive limb,HAL),机械外骨骼绑缚在人腿的两侧,利用贴在腿部皮肤上的EMG传感器检测肌肉的电流,控制电动马达驱动机械外骨骼运动以辅助腿部的动作。
美国加州大学伯克利分校机器人和人体工程实验室研制出美军“伯克利下肢外骨骼”(Berkeley lower ex tr emity exoskeleton, BLE-EX),由背包式外架、金属腿及相应的液压驱动设备组成,机械系统采用了与类人形结构相似的设计,背包式外架能够使操纵者携带一定载荷,其有效作用力不经过穿戴者而直接经由外骨骼传至地面。
下肢外骨骼能够携带外部负载和自身的重量(包括操纵者的重量)在崎岖路面远距离行走,能使带有全副武装的士兵增强负重能力和提高行军速度。
可穿戴型下肢助力机器人感知系统研究1 引言可穿戴型下肢助力机器人是辅助型康复机器人的一种,是一种帮助人们扩展下肢运动能力的助力装置。
其基本原理是在基于人体运动行为意识信息的基础上,由安装在腿部关节(髋关节及膝关节)处的伺服电机驱动关节运动,通过各关节角度、速度值的改变来达到与人体腿部的协调运动并提供助力,降低人在负重或长时间行走情况下的运动强度,对那些有异样运动行为的人提供治疗和矫形,与人体组成了一个协调而且完美的整体。
目前,世界上大约有10余家实验室从事可穿戴型人体助力机器人的研究,其中日本和美国走在前列,国内尚未见相关报道。
日本筑波大学(Tsukuba University)在2002年研制开发了机器人装混合助力腿(hyhrid assis-tive limb,HAL),机械外骨骼绑缚在人腿的两侧,利用贴在腿部皮肤上的EMG传感器检测肌肉的电流,控制电动马达驱动机械外骨骼运动以辅助腿部的动作。
美国加州大学伯克利分校机器人和人体工程实验室研制出美军“伯克利下肢外骨骼”(Berkeley lower extremity e xoskeleton, BLE-EX),由背包式外架、金属腿及相应的液压驱动设备组成,机械系统采用了与类人形结构相似的设计,背包式外架能够使操纵者携带一定载荷,其有效作用力不经过穿戴者而直接经由外骨骼传至地面。
下肢外骨骼能够携带外部负载和自身的重量(包括操纵者的重量)在崎岖路面远距离行走,能使带有全副武装的士兵增强负重能力和提高行军速度。
然而上述装置存在着共同的缺点,由于肌电传感器是根据肌肉活动时皮肤表面传送的微弱电流信号或肌肉的软硬程度来推断人的行为意识,导致所采用的大部分传感器要与人体肌肤直接接触并粘贴在肌肤上,需要特别的固定装置,这样直接导致穿戴上的不便;人体分泌的汗液、传感器安装的好坏等将影响所获取信息的稳定与准确性,而且信息量大而复杂,易受干扰,从而使控制难度加大。
因此,本文设计一种新型的可穿戴型下肢助力机器人感知系统,该系统用于获取人体下肢和机器人外骨骼之间的接触力,利用这些力信息和关节角度信息控制机器人外骨骼以实现对人体下肢运动的助力。
2 助力机器人系统可穿戴型下肢助力机器人主要由机械、传感和控制三大部分组成。
机器人外骨架包含12个自由度,每只腿有6个自由度,髋关节包含3个自由度,膝关节、踝关节和脚底各包含1个自由度,该设计要求不仅符合以往的拟人机器人行走机构的设计要求,又达到与人体腿部运动相协调、互不产生运动干涉的设计要求,如图1所示。
执行部分主要指直流伺服电机,该系统需要4个,它们分别固定在两腿髋关节和膝关节上。
可穿戴型下肢助力机器人控制系统主要采用PC104嵌入式控制系统板和PC104CAN 卡,整个系统的控制结构见图2。
3 机器人感知模块3.1 人机系统接触信息可穿戴型下肢助力机器人主要利用人体下肢运动信息提供助力,这些运动信息主要包括人体与外骨骼机器人的腿部接触力信号、脚底力信号,膝关节和踝关节的角度信号等。
为了获取这些运动信息,设计一套基于CAN总线的多传感器感知系统,解决了传统的传感器通信方式(主要是指RS-232和RS-485)中主节点单一和实时性差等问题。
该系统由电机码盘、安装在腿部的2个二维力传感器和安装在脚底的6个一维力传感器组成。
腿部力传感器固定在人腿膝关节和踝关节上部,用于测量人体与外骨骼之间的接触力;脚底力传感器安装在脚尖和脚跟,用于测量地面反力;电机码盘用于测量髋关节和膝关节转动角度,如图1所示。
3.2 系统设计腿部二维力传感器是用于测量机器人外骨骼和人体之间的接触力大小的传感器,其测量的准确性和稳定性对助力机器人的控制有重要的意义。
腿部力传感器主要是由2个二维力传感器组成,用于测量人体大、小腿与机器人外骨骼之间的接触力,该接触力包括沿人体腿部的力(X方向)和垂直腿部的力(Y方向)。
在下肢助力机器人的控制中,除了要知道人体腿部与机器人的作用力之外,还需要知道人体脚底对机器人的作用力,而脚部力传感器是测量地面对人机系统的作用反力。
人体落脚对地面的着力点可以用三个支撑点表示,这三个支撑点的位置分别位于第一跖骨根部和第五跖骨根部以及后脚跟,人体靠这三点间产生的足弓支撑身体,而身体的重量经由这三点传递到地面。
为了准确获取行走时脚底的力信息,脚底力传感器的安装位置就定在这三点的位置上,每只脚需要安装3个一维力传感器,共需要6个一维力传感器,具体安装位置见图3。
由于脚底机械部分的限制,传感器弹性体体积比较小,其本体机械尺寸φ40 mm(直径)×8 mm(厚度),量程为1000 N。
3.3 传感器设计弹性体的设计是多维传感器设计中的关键。
本文在利用有限元分析方法对传感器弹性体的静态和动态特性仿真分析的基础上,设计一种基于E型膜片的弹性体结构,这种结构的传感器具有结构简单、灵敏度高、维间耦合小、容易标定的特点。
整个弹性体主要由弹性膜片、应变计和受力转接体三个部分组成,弹性体由两层E型膜片构成,实现X和Y两个方向应变力的测量。
弹性膜片为圆形结构,其直径和厚度分别为φ15 mm和2 mm,厚度方向和测量方向一致。
敏感元件采用箔式电阻应变片,应变片粘贴在E型膜片上。
传感器的输出是E型膜片的应力,应力的测量方式很多,本研究采用箔式电阻应变片,应变片粘贴在E型膜片上,用于测量弹性体上应力的大小。
应变计贴片位置如图4所示,X和Y方向应变片安装在E型膜片的下端,四片应变片电阻组成一个惠斯登全桥电路(如图5所示),实现输出信号的自动解耦。
当力作用于传感器时,由于力大小、方向的不同,各个方向的敏感电阻受到的应力不同,从而得到力与应变之间的关系。
以X方向为例,E型膜片敏感弹性部分的圆环平膜片属于薄板结构,在X向力的作用下,边界条件比较简单,可以等效为外圆周固定,集中应力作用在硬中心的圆形薄板。
根据薄板理论可知,周边固支具有硬中心的膜片在半径r处的径向应力εr和切向应力εθ为式中:ω,h分别为圆形膜片的法向位移和厚度;F为施加力的等效集中力;f(r),P(r)是仅与r有关的函数。
由上式可以看出,当半径r一定,也就是压敏电阻位置固定时,圆形膜片表面上的应变ε为ε=kFF (3)式中kF为应变系数常量。
由于使用等臂电桥,即R1=R2=R3=R4,有式中:ε1,ε2,ε3,ε4分别是4个敏感电阻R1,R2,R3,R4的应变;ε为圆形膜片的总应变;G,k为常量;UX是桥路输出电压。
综合式(4),(5),桥路的输出电压信号正比于传感器的力信号,测量输出电压信号就可以得到被测目标的力信号。
传感器硬件电路采用嵌入式片上系统,由数字电路和模拟电路两部分组成,其中模拟电路由信号调零电路、运算放大电路和模拟滤波电路组成;数字电路部分主要包括A/D 采样模块、数字计算模块、CAN总线控制器、CAN总线驱动器和必要的外围电路模块。
图6是助力机器人力传知系统的数据采集与处理系统的硬件电路原理框图。
软件设计分为下位机(微处理器)的软件设计和上位机(PC)的软件设计。
每个传感器作为一个节点通过CAN总线互联,当接收到上位机的命令后,首先进行命令判断,根据不同的命令作出相应的数据处理。
上位机(PC)主要包括清零点、力信息(数字量)、回传力信息、查询力信息、屏蔽报警等命令。
下位机的软件设计主要由数据采集程序(A/D转换)、数据处理程序以及CAN总线通讯程序三大部分组成。
启动CAN中断以前,在主程序中进行一次数据采集,得到传感器系统的初始值,这其中包括3个A/D转换通道;延时,完成通道的初始化;数据采集是在CAN中断程序中完成的,每一次中断完成1组三维力信息数据的采集以及相应的A/D转换;同时读取转换结果,对转换结果进行数字处理,数字处理主要由数字滤波与力信息解耦两大部分组成,数字滤波主要采用窗口移动法与数据平均值法相结合;数据经过解耦处理后,通过SendData()函数,将数据发送到CAN总线上,上位机通过ID号识别接受下位机数据,具体流程见图7。
4 传感器标定实验E型膜片元件结构的复杂性使得产品特性的一致性比一维传感器更难保证,应变计的贴片工艺很难保证绝对理想情况,这些因素决定传感器的实际静态特性和理论计算值之间存在一定的误差,因此传感器的静态特性一般采用标定实验的方法获取,其标定准确度将直接影响传感器使用时的测量准确度。
所谓传感器的标定,就是建立传感器的三路输出值与作用在传感器坐标系原点上的三维力之间的数量关系。
标定实验过程包括静态标定和实时测量验证两部分。
为了减少随机误差的影响,采用一种具有一定冗余力向量的最小二乘标定方法。
设F是加载力矩阵,V为传感器的输出矩阵(数字量),C为标定矩阵,E为误差矩阵,则F=CV+E (6)式中:F,V为已知量;E可以设定。
于是,标定矩阵的求解可以转化为求解标定矩阵C,使式(6)在最小二乘法意义下最优。
在微型指力传感器标定过程中,对施加在传感器上X,Y方向的载荷和敏感桥路之间的关系进行测量,其测量值(数字量)与所加砝码数值的对应关系如图8所示(XLable表示传感器标定所加载荷,Ylable表示传感器输出数字量)。
从图8可以看出,传感器X方向加力时,所受载荷和传感器敏感桥路输出之间的映射关系可以基本认为是线性的,Y方向的最大耦合不超过2.5%。
利用最小二乘法得到传感器的两组静态标定矩阵为由此可以计算出传感器的I类误差为2%,II类误差为2.5%。
利刚C1,C2两组标定矩阵对传感器进行实时测量检验,结果显示I类最大误差不超过2%,II类误差不超过2.5%。
通过该标定系统得到的静态标定矩阵和理论设计值比较接近,说明标定系统和标定方案是切实可行的。
5 结论本文针对一种新型的人体辅助型康复机器人,设计了一套基于CAN总线的下肢运动信息感知系统,见图9。
经分析可穿戴型助力机器人所需要的控制信息可确定传感器的种类、数量和安装位置;重点介绍腿部和脚底力传感器的弹性体设计,测量电路和上下位机软件;对传感器进行标定实验并对数据进行分析,给出传感器的一般性能指标,结果说明本研究中的设计理论和设计过程是正确的,基本可以满足可穿戴型下肢助力机器人控制系统的需要。
未来的工作主要集中在以下几点:①继续完善传感器的弹性体结构,在满足传感器性能指标的基础上进一步减小传感器弹性体体积和精确确定应变计的贴片位置;②完善传感器的测量电路设计,增加滤波电路,改进放大电路;③改进传感器的标定系统,把标定误差降至最低。