机械原理课件 用速度瞬心法作速度分析
- 格式:pdf
- 大小:150.97 KB
- 文档页数:16
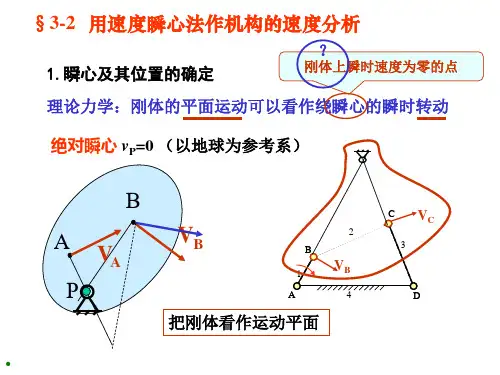
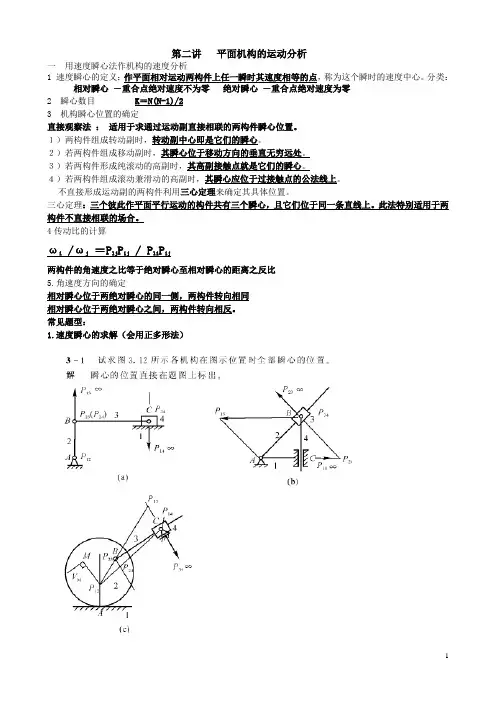
第二讲平面机构的运动分析一用速度瞬心法作机构的速度分析1 速度瞬心的定义:作平面相对运动两构件上任一瞬时其速度相等的点,称为这个瞬时的速度中心。
分类:相对瞬心-重合点绝对速度不为零绝对瞬心-重合点绝对速度为零2 瞬心数目 K=N(N-1)/23 机构瞬心位置的确定直接观察法:适用于求通过运动副直接相联的两构件瞬心位置。
1)两构件组成转动副时,转动副中心即是它们的瞬心。
2)若两构件组成移动副时,其瞬心位于移动方向的垂直无穷远处。
3)若两构件形成纯滚动的高副时,其高副接触点就是它们的瞬心。
4)若两构件组成滚动兼滑动的高副时,其瞬心应位于过接触点的公法线上。
不直接形成运动副的两构件利用三心定理来确定其具体位置。
三心定理:三个彼此作平面平行运动的构件共有三个瞬心,且它们位于同一条直线上。
此法特别适用于两构件不直接相联的场合。
4传动比的计算ωi /ωj=P1j P ij / P1i P ij两构件的角速度之比等于绝对瞬心至相对瞬心的距离之反比5.角速度方向的确定相对瞬心位于两绝对瞬心的同一侧,两构件转向相同相对瞬心位于两绝对瞬心之间,两构件转向相反。
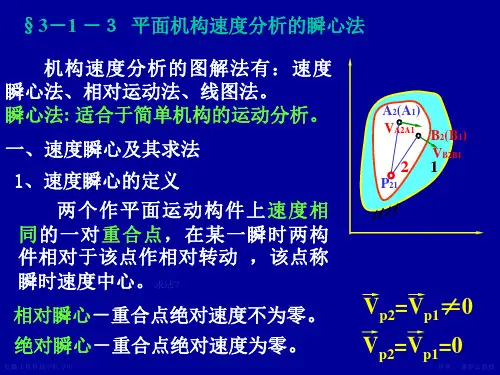
常见题型:1.速度瞬心的求解(会用正多形法)2利用速度瞬心求解速度。
ωi /ωj =P 1j P ij / P 1i P ij例题:在图示四杆机构中,AB l =60mm ,CD l =90mm ,AD l =BC l =120mm ,2ω=10rad/s ,试用瞬心法求: (1)当ϕ=45°时,点C 的速度C v;(2)当ϕ=165°时,构件3的BC 线上(或其延长线上)速度最小的一点E 的位置及其速度大小;(3)当C v =0时,ϕ角之值(有两个解)。
P 13C(a)解:以选定的比例尺0.005/l m mm μ=作机构运动简图如图3-2所示。
(1)定瞬心P 13的位置,求v c 。
131331 6.07rad /AP DP l l s ωω==30.547/c l v CD m s μω==(2)如图(b )所示,定出构件2的BC 线上速度最小的一点E 位置及速度的大小。
《机械原理》第三章平面机构运动分析——利用瞬心法进行机构速度分析12345P 23P 12P 15P 45P 34P 15P 12P 23P 34P 45例1:图示五杆机构,标出全部瞬心。
(1)2n n N -=1、瞬心数目:5(51)2⨯-=10=2、瞬心位置:运动副联接:非运动副联接:1223344515P P P P P 、、、、1314242535P P P P P 、、、、P 13P 35P 1412345P 23P 12P 15P 45P 34P 15P 12P 23P 34P 45例1:图示五杆机构,标出全部瞬心。
(已知P 14在AE 线上)P 14P 13P 35P 13P 35P 141342P 34P 14P 23P 12P 24例2:设已知机构各构件尺寸,原动件2的角速度为ω2,求在图示位置时从动件4的角速度ω4。
分析:已知ω2,则构件2上各点运动已知,4构件为转动构件,如果知道构件上某点的速度大小,可求出其角速度ω4。
而P 24为2、4构件的等速重合点。
解:确定机构瞬心如图所示2142441224P P P P ωω=41424lP P ωμ=2421224P l v P P ωμ=机构的传动比机构的传动比等于该两构件的绝对瞬心至相对瞬心距离的反比。
为尺寸比例尺l μω4ω224P v 请问在此位置3构件的转动中心在哪儿?P 13分析:已知ω2,则构件2上各点运动已知,4构件为平动构件,构件上某点的运动可代替该构件的运动,P 24为2、4构件的等速重合点。
P 23P 24P 12234ω2v 4P 14→∞P 34例3:如图所示的带有一移动副的平面四杆机构中, 已知原动件2以角速度ω2等速度转动, 现需用瞬心法确定机构在图示位置时从动件4的速度v 4。
2421224P lv v P P ωμ==解:确定机构瞬心如图所示式中为尺寸比例尺l μv P 24例4:如图所示凸轮机构,设已知各构件尺寸和凸轮的角速度w 2,求从动件3的速度v 3。