机械原理 瞬心法求速度
- 格式:ppt
- 大小:520.00 KB
- 文档页数:18
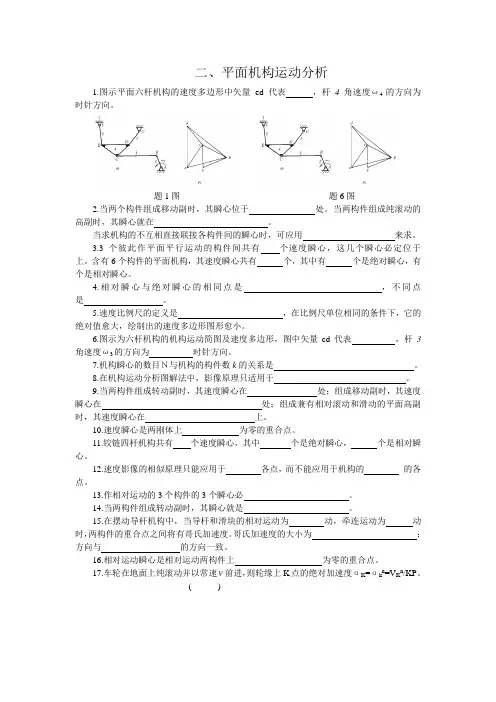
二、平面机构运动分析1.图示平面六杆机构的速度多边形中矢量ed代表,杆4角速度ω4的方向为时针方向。
题1图题6图2.当两个构件组成移动副时,其瞬心位于处。
当两构件组成纯滚动的高副时,其瞬心就在。
当求机构的不互相直接联接各构件间的瞬心时,可应用来求。
3.3个彼此作平面平行运动的构件间共有个速度瞬心,这几个瞬心必定位于上。
含有6个构件的平面机构,其速度瞬心共有个,其中有个是绝对瞬心,有个是相对瞬心。
4.相对瞬心与绝对瞬心的相同点是,不同点是。
5.速度比例尺的定义是,在比例尺单位相同的条件下,它的绝对值愈大,绘制出的速度多边形图形愈小。
6.图示为六杆机构的机构运动简图及速度多边形,图中矢量cd代表,杆3角速度ω3的方向为时针方向。
7.机构瞬心的数目N与机构的构件数k的关系是。
8.在机构运动分析图解法中,影像原理只适用于。
9.当两构件组成转动副时,其速度瞬心在处;组成移动副时,其速度瞬心在处;组成兼有相对滚动和滑动的平面高副时,其速度瞬心在上。
10.速度瞬心是两刚体上为零的重合点。
11.铰链四杆机构共有个速度瞬心,其中个是绝对瞬心,个是相对瞬心。
12.速度影像的相似原理只能应用于各点,而不能应用于机构的的各点。
13.作相对运动的3个构件的3个瞬心必。
14.当两构件组成转动副时,其瞬心就是。
15.在摆动导杆机构中,当导杆和滑块的相对运动为动,牵连运动为动时,两构件的重合点之间将有哥氏加速度。
哥氏加速度的大小为;方向与的方向一致。
16.相对运动瞬心是相对运动两构件上为零的重合点。
17.车轮在地面上纯滚动并以常速v前进,则轮缘上K点的绝对加速度αK=αk n=V K n/KP。
---------------------------------------( )18.高副两元素之间相对运动有滚动和滑动时,其瞬心就在两元素的接触点。
---( )19.在图示机构中,已知ω1及机构尺寸,为求解C 2点的加速度,只要列出一个矢量方程a C2=a B2+a n C2B2+a t C2B2就可以用图解法将a C2求出。
机械原理中的速度瞬心讲解速度瞬心是机械原理中的一个重要概念,它在机械传动、运动学和动力学问题的研究中扮演着至关重要的角色。
本文将从定义、原理、应用以及相关公式等多个角度对速度瞬心进行详细讲解。
一、定义和原理速度瞬心是指在机械运动过程中,质点速度矢量的方向和瞬心所在直线方向相重合的点。
简单来说,速度瞬心就是质点瞬时速度的方向与它所在直线方向的交点。
在机械运动过程中,瞬时速度是质点在某一瞬间的瞬时速度,它的大小是瞬时速度的矢量,方向是切线方向。
而速度瞬心则是质点的速度矢量方向与瞬心所在直线方向相重合的点。
速度瞬心的计算方法有很多,其中最常用的方法是使用切线的性质。
在曲线运动中,我们可以通过将切线向后延长,找到两条切线的交点,这个交点就是速度瞬心。
二、速度瞬心的应用速度瞬心在机械工程中有广泛的应用,尤其在运动学和动力学的问题分析中起到了重要作用。
下面以几个具体的例子来说明速度瞬心的应用。
1. 齿轮传动齿轮传动中,速度瞬心常用来确定传动比和齿轮的尺寸。
在两个齿轮相互啮合时,它们的速度瞬心位于齿轮啮合线上,通过计算速度瞬心的位置,可以确定齿轮的啮合情况、传动比和齿轮的尺寸。
2. 曲柄连杆机构曲柄连杆机构中,速度瞬心可用于分析和计算连杆的运动规律。
通过计算连杆各个位置的速度瞬心,可以得到连杆的位移、速度和加速度等参数,从而研究连杆运动的特性和工作原理。
3. 自行车前叉自行车前叉是一种常见的悬挂系统,其原理基于速度瞬心。
在自行车行驶过程中,前叉通过改变前轮的速度瞬心位置来调整悬挂系统的刚度。
通过调整速度瞬心的位置,可以使得前叉对不同路面的冲击吸收能力更好,提高骑行的舒适性和稳定性。
三、速度瞬心的计算方法计算速度瞬心的方法有多种,下面介绍几种常见的计算方法。
1. 直接法直接法是速度瞬心计算的最基本方法,它适用于已知点的速度矢量和所在直线方向的情况。
根据已知点的速度矢量和所在直线的方向,我们可以直接求解速度瞬心。
机械原理瞬心法求速度习题引言机械原理是工程力学的一部分,研究物体的运动及力学效应。
在机械原理中,瞬心法是一种常用的分析方法,用于求解物体的速度和加速度。
本文将通过解答一些瞬心法求速度的习题,加深对机械原理的理解。
问题一有一个直径为1m的转盘,上面有一个固定在轴上的活动滑块。
滑块到轴的距离为0.5m。
转盘以5 rad/s的角速度逆时针旋转。
求滑块上某点P的速度。
首先,我们需要确定滑块上的点P的位置。
由于滑块到轴的距离为0.5m,而转盘的直径为1m,因此点P的位置位于滑块上与轴对称的位置,距离轴0.5m。
我们可以使用瞬心法来求解滑块上点P的速度。
瞬心法的基本原理是,在运动过程中,物体的速度等于通过瞬时转动中心与物体上的某一点所作的相对速度。
在本题中,我们可以选择转盘的轴作为瞬时转动中心。
因此,我们需要确定点P相对于转动中心的位置向量和其相对于转动中心的速度向量。
点P相对于转动中心的位置向量为[0.5, 0],即P的横坐标为0.5m,纵坐标为0,代表距离转动中心0.5m。
点P相对于转动中心的速度向量为[0, R * ω],其中R 为转盘的半径,即0.5m,ω为转盘的角速度,即5 rad/s。
代入数值计算,得到速度向量为[0, 2.5],即P点的速度大小为2.5 m/s,方向为垂直于转盘的切线方向。
问题二一个直径为0.8m的小车以2 rad/s的角速度逆时针旋转。
小车上有一根长1.2m的杆,杆上距离小车中心0.6m处有一个质量为1kg的小球。
求小球的速度大小和方向。
我们可以使用瞬心法来求解小球的速度。
同样地,选择小车的中心作为瞬时转动中心。
首先,我们需要确定小球相对于转动中心的位置向量和其相对于转动中心的速度向量。
小球相对于转动中心的位置向量为[0.6, 0],即小球距离转动中心0.6m。
小球相对于转动中心的速度向量为[0, R * ω],其中R为小车直径的一半,即0.4m,ω为小车的角速度,即2 rad/s。
机械原理瞬心法求速度瞬心法是机械原理中常用的一种方法,用于求解速度等相关物理量。
它通过确定物体运动过程中的瞬心位置,将物体分解为一个旋转运动和一个平动运动,从而简化求解的复杂度。
在瞬心法中,首先需要确定物体的瞬心位置。
瞬心位置是指旋转运动和平动运动的合成运动中,旋转运动的瞬时转轴所在的位置。
通常情况下,物体的瞬心位置与物体几何形状的对称轴位置相关,并且只在一些时刻有效。
确定瞬心位置后,可以把物体分解为一个绕瞬心旋转的刚体和一个相对于瞬心平动的刚体。
这样,我们只需要分别对旋转和平动进行分析,再通过合成求得物体的运动情况。
对于旋转运动的部分,我们可以利用刚体的旋转惯量、转动角加速度等物理量,结合牛顿第二定律或者角动量守恒定律,求解物体的旋转运动参数。
具体来说,可以利用力矩平衡方程,或者根据牛顿第二定律和转动学的关系,得到力矩与角加速度之间的关系式,从而求解角加速度。
对于平动运动的部分,我们可以利用质心的平动动力学方程,结合牛顿第二定律,求解物体的平动运动参数。
具体来说,可以利用合外力与质量之积等于质量乘以加速度,求解合外力和加速度之间的关系式,从而求解加速度。
通过求解物体的旋转和平动运动参数,我们可以得到物体的速度。
对于旋转运动的部分,可以利用刚体运动学的关系式,根据角速度和瞬心到质点的距离,求解质点的速度。
对于平动运动的部分,可以直接通过质心的速度来求解。
最后,通过合成旋转和平动的速度,即可得到整个物体的速度。
具体来说,可以将旋转速度的向量与平动速度的向量进行矢量相加,得到物体的总速度。
总之,瞬心法是一种常用的机械原理求解速度的方法。
它通过确定瞬心位置,将物体分解为旋转和平动两个部分,分别计算旋转和平动的速度,再进行矢量相加,得到整个物体的速度。
通过使用这一方法,可以简化计算过程,提高求解的准确性和效率。
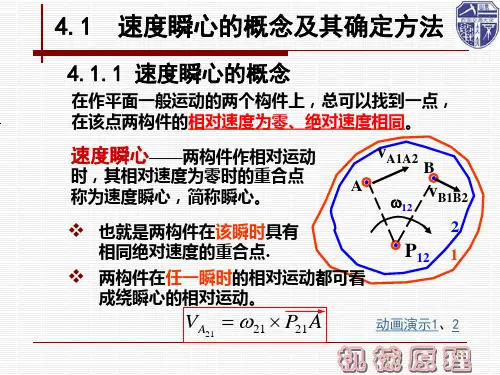
机械原理速度瞬心机械原理中的速度瞬心是一个非常重要的概念,它对于理解和分析机械系统的运动特性具有重要的意义。
速度瞬心是指在一个给定的瞬时,系统中某一点的速度矢量的瞬时瞬心。
在实际的机械系统中,速度瞬心可以帮助我们分析系统的运动规律,设计机械结构,优化机械性能等方面起到至关重要的作用。
首先,我们来看一下速度瞬心的定义。
在机械系统中,每个点都有一个与之相关的速度矢量,该速度矢量描述了该点在某一时刻的瞬时速度。
而速度瞬心则是描述了在某一时刻,系统中某一点的速度矢量的瞬时瞬心。
换句话说,速度瞬心可以理解为系统中某一点的瞬时转动中心,该点在这一瞬时的运动状态可以用一个瞬时瞬心来描述。
其次,我们来看一下速度瞬心的应用。
在机械系统的设计和分析中,速度瞬心可以帮助我们更好地理解系统的运动规律。
通过对速度瞬心的分析,我们可以确定系统中各个点的运动状态,找出系统中可能存在的问题,进而优化系统的结构和性能。
此外,速度瞬心还可以帮助我们设计新的机械系统,提高系统的效率和稳定性。
再者,我们来看一下速度瞬心的计算方法。
在实际的工程应用中,计算速度瞬心是非常重要的。
一般来说,我们可以利用刚体运动学的知识,通过对系统中各个点的速度矢量进行分析,来确定速度瞬心的位置和性质。
在实际的计算过程中,我们可以借助计算机辅助设计软件,通过数值模拟的方法来计算速度瞬心,进而得到系统的运动规律和性能参数。
最后,我们来看一下速度瞬心的意义。
速度瞬心作为机械原理中的重要概念,对于理解和分析机械系统的运动特性具有重要的意义。
通过对速度瞬心的研究和应用,我们可以更好地理解机械系统的运动规律,设计新的机械结构,优化机械性能,提高系统的效率和稳定性,从而推动机械工程领域的发展。
综上所述,速度瞬心是机械原理中的重要概念,它对于理解和分析机械系统的运动特性具有重要的意义。
通过对速度瞬心的研究和应用,我们可以更好地理解系统的运动规律,设计新的机械结构,优化机械性能,推动机械工程领域的发展。
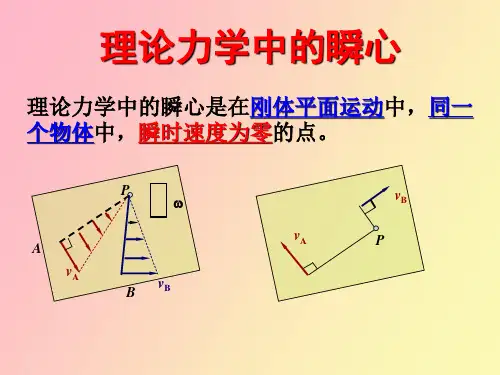
机械原理速度瞬心法机械原理速度瞬心法,是求解刚体运动的一种常用方法。
瞬心法简单来说就是找到相对速度为零的瞬间,然后在该瞬间分析物体的运动状态。
瞬心法主要应用于刚体在平面内的转动运动,下面我将就此展开讲解。
一、瞬心法的基本思想在瞬心法中,我们首先需要找到物体运动的瞬间中心,即瞬心。
瞬心是指在某一瞬间,物体上的任何一点到瞬心的相对速度为零。
在这种情况下,物体的运动可以看成是由两个简单的运动组合而成,一个是绕着瞬心旋转的纯转动运动,另一个是沿瞬心到该点的径线做直线运动。
二、求解瞬心的方法求解瞬心的方法主要有以下两种:1.利用速度的符号来判断瞬心位置由于瞬心是物体上任何一点的相对速度为零,因此可以通过不同点的速度符号来定位瞬心位置。
具体步骤如下:(1)选择两个质点,在剩下的质点当中任选取一个质点作为待求点。
(2)计算出上述两个质点相对于待求点在瞬间的速度矢量。
(3)根据速度矢量的相对位置确定瞬心在待求点的哪侧,方向沿待求点到相对位置两点组成的连线(即连线的延长线)。
2.利用矢量叉积法求解瞬心还有一种简单易行的方法是利用叉积求解瞬心,具体如下:(1)选取一个在物体运动方向上的固定的点O。
(2)以该点为起点,分别作向各个质点的速度矢量为方向,长度与速度的大小成比例的线段。
(3)将各个线段所在直线与以O点为起点垂直于物体运动方向为方向的直线交点,即为瞬心位置。
三、利用瞬心法解题步骤接下来,以平面内刚体运动转动为例,介绍瞬心法的解题步骤:1.标出物体上各质点的速度向量和角速度ω。
2.求出瞬心位置和速度大小。
3.利用瞬心和对应质点之间的距离求解线速度和角速度。
4.根据物理原理,利用转动定律和牛顿第二定律求解物体的运动状态。
四、注意事项在应用瞬心法时,也需要注意一些细节问题:1.瞬心法只适用于刚体的平面内转动运动,不能应用于非平面情况。
2.在用速度符号求解瞬心时,应注意速度符号判断的正确性,不要因判定瞬心位置错误而导致解题出错。
机械原理瞬心法求速度机械原理中有一种求速度的方法称为瞬心法。
这种方法基于物体绕固定轴旋转时的动力学原理,极大地简化了求解速度的过程。
本文将介绍一下瞬心法的基本原理以及如何应用瞬心法来求解物体的速度。
瞬心法基本原理瞬心法的基本原理是基于旋转运动的动力学原理。
当物体沿固定轴旋转时,我们可以将其视为一系列平行于固定轴的旋转运动的叠加。
这种旋转运动的叠加使得物体上的每一个点都会沿着一条圆弧轨迹运动,这个圆弧的圆心称为瞬心。
瞬心的位置可以用以下公式计算得出:v = v0 + a*tx = x0 + v0*t + 0.5*a*t^2其中,v 表示物体在某一时刻的速度,v0 表示物体在初始时刻的速度,a 表示物体在沿着圆弧轨迹运动时的加速度,t 表示经过的时间,x 表示物体在某一时刻的位置,x0 表示物体在初始时刻的位置。
在瞬心法中,这个公式被用来计算物体在旋转过程中的速度。
如何使用瞬心法求速度使用瞬心法求速度需要以下几个步骤:1.找到旋转轴首先需要确定旋转轴的位置。
旋转轴可以是任何固定的轴,例如绕杆旋转、绕轮旋转等。
2.确定瞬心位置瞬心是旋转轴上的一个点,它是物体上所有点沿圆弧轨迹运动叠加后的圆心。
瞬心的位置可以通过计算得出。
3.计算速度计算物体上某一点在某一时刻的速度需要使用瞬心法中的公式。
具体来说,可以通过以下步骤计算速度:•确定物体上某一点的位置和速度向量•确认该点相对于瞬心的位置,并将该位置和速度向量分解为平行于和垂直于旋转轴的两个矢量•计算沿着圆弧轨迹运动的加速度 a,一般情况下使用牛顿第二定律进行计算•使用瞬心法中的公式计算速度,并得出物体上该点在该时刻的速度瞬心法的应用瞬心法广泛应用于机械工程中,特别是在设计和分析各种旋转机械时。
下面我们以一个例子来说明如何使用瞬心法进行计算。
假设我们有一个半径为 R 的小球在平面上沿着圆周轨迹绕着一根竖直轴旋转。
现在我们想要知道小球在顶部(即与地面平行的位置)绕轴旋转的速度。
机械原理中的三心定理机械原理机构的速度分析中提到了速度瞬心的概念,比如一个四杆机构,每两个构件之间都有一个速度瞬心,那么共有6个速度瞬心,三心定理指:相邻的三个构件间的三个速度瞬心必在同一条直线上。
当相邻的三个构件的某两对构件的瞬心很容易确定时,依据此定理可以获得另一对构件间的速度瞬心。
三心定理,当两构件直接组成运动副时,其瞬心的位置可以很容易地通过直接观察加以确定;如果两构件没有直接连接形成运动副,则它们的瞬心位置需要用三心定理来确定。
三心定理的内容是:四连杆机构中,作平面平行运动的三个构件共有三个瞬心,它们位于同一直线上。
应用三心定理求瞬心,再用速度瞬心法求解问题。
速度瞬心法:1)速度瞬心法仅用于求解速度问题,不能用于求解加速度问题;2)速度瞬心法用于简单机构(构件较少),很方便、几何意义强;3)对于复杂机构,瞬心数目太多,速度瞬心法求解不便(可以只找与解题有关的瞬心);4)瞬心落在图外,解法失效;5)瞬心多边形求解的实质为三心定理,对超过4个以上构件的机构借助于瞬心多边形求解较方便。
三心定理应用于机械原理学的概念三心定理是指三个构件总共存在三个瞬心,这三个瞬心一定在一条直线上。
应用是找两个不相连的两构件的瞬心,如构件1和构件4不相连,但他们都和构件2,3相连,那么找13和34瞬心,连成直线,再找12和24瞬心,连成直线,这两个直线的交点就是14瞬心。
三心定理,当两构件直接组成运动副时,其瞬心的位置可以很容易地通过直接观察加以确定;如果两构件没有直接连接形成运动副,则它们的瞬心位置需要用三心定理来确定。
三心定理的内容是:四连杆机构中,作平面平行运动的三个构件共有三个瞬心,它们位于同一直线上。
应用应用三心定理求瞬心,再用速度瞬心法求解问题。
速度瞬心法1)速度瞬心法仅用于求解速度问题,不能用于求解加速度问题;2)速度瞬心法用于简单机构(构件较少),很方便、几何意义强;3)对于复杂机构,瞬心数目太多,速度瞬心法求解不便(可以只找与解题有关的瞬心);4)瞬心落在图外,解法失效;5)瞬心多边形求解的实质为三心定理,对超过4个以上构件的机构借助于瞬心多边形求解比较方便。