自控原理-第6章 控制系统的误差分析与计算精品文档33页
- 格式:ppt
- 大小:915.50 KB
- 文档页数:33

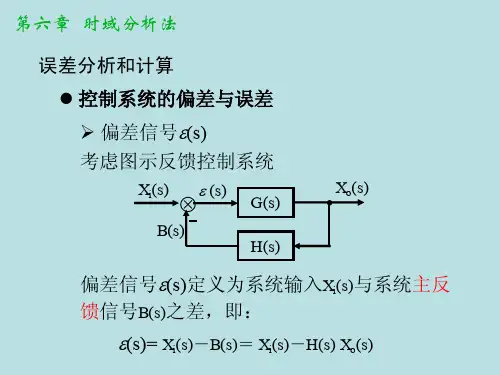
控制系统的误差分析和计算控制系统是一种能够根据输入信号自动调整输出信号以达到特定目标的系统。
在实际应用中,控制系统通常会存在误差,这是由于系统本身的局限性或者外部干扰所导致的。
因此,误差分析和计算是控制系统设计中非常重要的一个方面。
误差的分类在控制系统中,可以将误差分为静态误差和动态误差两类。
静态误差是指系统在达到稳定状态后与期望值之间的偏差,而动态误差则是指系统在过渡过程中可能出现的偏差。
静态误差静态误差可以进一步分为系统固有误差和外部扰动引起的误差两类。
1.系统固有误差:这种误差是由于系统本身的局限性造成的。
常见的系统固有误差有零点偏移和增益误差。
零点偏移是指当输入信号为零时,系统的输出不为零,而增益误差则是指系统的输出与输入的比例不匹配。
2.外部扰动引起的误差:除了系统固有误差外,控制系统还会受到外部扰动的影响而产生误差。
这些扰动可以是环境变化、传感器误差或者外力干扰等。
动态误差动态误差是指系统在过渡过程中与期望值之间的偏差。
常见的动态误差有超调、震荡和稳定时间等。
1.超调:当系统在响应过程中超过期望值时,会产生超调误差。
一般来说,超调误差越小,系统的性能越好。
2.震荡:当系统在过渡过程中出现频繁的来回振荡时,会产生震荡误差。
震荡误差会导致系统不稳定,甚至无法收敛到期望值。
3.稳定时间:稳定时间是指系统从初始状态到达稳定状态所需的时间。
稳定时间越小,系统的响应速度越快。
误差计算方法误差计算是评估控制系统性能的重要指标之一。
常用的误差计算方法包括绝对误差、相对误差和均方根误差等。
绝对误差绝对误差是指系统输出与期望值之间的差值的绝对值。
可以用以下公式表示:绝对误差 = |期望值 - 系统输出|绝对误差可以直观地反映系统的偏差情况,但它没有考虑到系统和期望值的尺度差异。
相对误差相对误差是指绝对误差与期望值之间的比值。
可以用以下公式表示:相对误差 = (绝对误差 / 期望值) * 100%相对误差可以解决绝对误差忽略尺度差异的问题,但它对于系统输出为零的情况会出现无穷大的情况。