谐波减速器 ppt
- 格式:ppt
- 大小:1.01 MB
- 文档页数:30

P r e c i s i o n G e a r i n g&M o t i o n C o n t r o l{{{The Basic Component Set1) T he Wave generator (WG) is a thin raced bearings assembly fi tted onto an elliptical plug, and normally is the rotating input member.2) T he Flexspline (FS) is a non-rigid ring with external teeth on a slightly smaller pitch diameter than the Circular Spline. It is fi tted over and is elastically defl ected by the Wave Generator.3) T he Circular Spline (CS) is a rigid ring with internal teeth, engaging the teeth of the Flexspline across the major axis of the Wave Generator.4) T he Dynamic Spline (DS) is a rigid ring havinginternal teeth of same number as the Flexspline. It rotates together with the Flexspline and serves as the output member. It is identifi ed by chamfered corners at its outside diameter.ContentsCompact, High Ratio, In-Line Gearing .............................2The Basic Component Set ................................................2Confi guration .....................................................................3Typical Installation .............................................................3Ordering Information .........................................................3Dimensions ........................................................................4Performance Ratings ........................................................5Lubrication .........................................................................6Installation .........................................................................6Effi ciency ...........................................................................7No-Load Running Torque, Starting Torque,and Back Driving Torque (7)Compact, High Ratio, In-Line GearingHarmonic Drive HDUF “Pancake” type component set offers the designer high ratio, in-line mechanical powertransmissions in extremely compact confi gurations. The component set consists of four elements: the Wave generator, an elliptical bearing assembly; the Flexspline, a non-rigid ring with external teeth; and the Circular Spline and the Dynamic Spline, rigid internal gears.Rotation of the Wave Generator imparts a rotating elliptical shape to the Flexspline causing progressive engagement of its external teeth with the internal teeth of the Circular Spline and the Dynamic Spline. The fi xed Circular Spline has two more teeth than the Flexspline, thereby imparting relative rotation to the Flexspline at a reduction ratio corresponding to the difference in the number of teeth. With the same number of teeth, the Dynamic Spline rotates with and at the same speed as the Flexspline.Confi gurations1) Reduction GearingWG Input CS Fixed DS Output Ratio as listedInput and output in opposite direction.2) Reduction Gearing WG Input CS Output DS FixedRatio1 R+1Input and output in same direction.OutputInputOutputInputOutputInput4) Differential WG Control Input CS Main-drive Input DS Main-drive OutputNumerous differential functions can be obtained by combinations of speeds and rotations on the three shafts.3) Reduction Gearing WG Fixed CS Output DS InputRatioR R+1Input and output in same direction.OutputInputOrdering InformationPancake model with the single row bearing Wave Generator Size 20Reduction ratio 80:1Component setBacklash optimized to below 3 arc minutes (Optional)Suffi x indicating that the set is specially modifi ed or designed according to customer requirements.HDUF 20-80-2G-BL3-SPTypical InstallationHDUF “pancake” type component sets are easier to use than conventional gearing. All that is required is suitable bearing support for the input and output shaft, and a means of fi xing the circular spline against rotation.The simplicity of HDUF component sets is demonstrated in the typical arrangements shown below.1. Wave Generator2. Flexspline3. Circular Spline4. Dynamic Spline5. Motor6. I nput Shaft or Motor Shaft7. Output ShaftDimensionsMaximum housing I.D. for Flexspline axial containment is L. The surface hardness in the region where the Flexspline abuts the housing is recommended to be HRC 29–34.Performance Ratings* Thermal limited–50% duty cycle with on time not exceeding 15 minutes.** This torque is not to be exceeded under any circumstances.*** Rating at input speed below 500 rpm is same as for 500 rpm.**** Backlash measured at output with the input locked, maximum value.LubricationOil lubrication ratings are based on Molub Alloy gear Oil No. 80. See table for recommended oil level and volume for horizontal shaft mounting.For vertical mounting the recommended level is at the wave generator bearing ball centerline or midpoint ofGrease lubricated ratings are based on Harmonic Grease HC-1, which has been specially developed for Harmonic Drive lubrication. Alternate lubricants include Molub Alloy Grease No. 2, Shell Alvania EP 1 and their equivalents.For retention of grease within the tooth mesh areaand the ball bearing, it is recommended that the L dimension (see HDUF Dimensions, page 4) be extended further inward to at least S.mmInstallationThe Dynamic Spline is distinguished by its chamfered outer edge. HDUF Component Sets may be operated in any attitude. Recommended installed relationships are shown below:Housing ToleranceEffi ciencyEffi ciency varies depending on input speed, ratio, load level, temperature, and type of lubrication. The effects of these factors are illustrated in the curves shown below.HDUF Effi ciency vs. Ratio, Temperature, and Lubricant (At Rated Torque)Input Speed 3400 rpmInput Speed 500 rpmInput Speed 1700 rpmNo-Load Running Torque, Starting Torque, and Backdriving TorqueValues quoted are based on actual tests with the component sets assembled in housings, and takes into consideration friction resistance of oils seals, and churning of oil.。
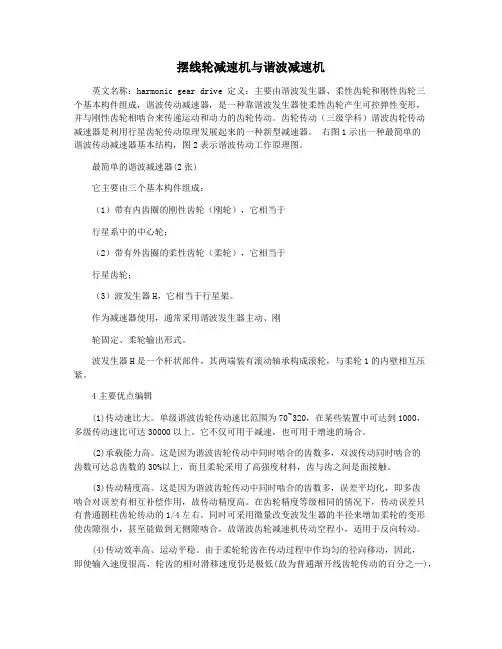
摆线轮减速机与谐波减速机英文名称:harmonic gear drive 定义:主要由谐波发生器、柔性齿轮和刚性齿轮三个基本构件组成,谐波传动减速器,是一种靠谐波发生器使柔性齿轮产生可控弹性变形,并与刚性齿轮相啮合来传递运动和动力的齿轮传动。
齿轮传动(三级学科)谐波齿轮传动减速器是利用行星齿轮传动原理发展起来的一种新型减速器。
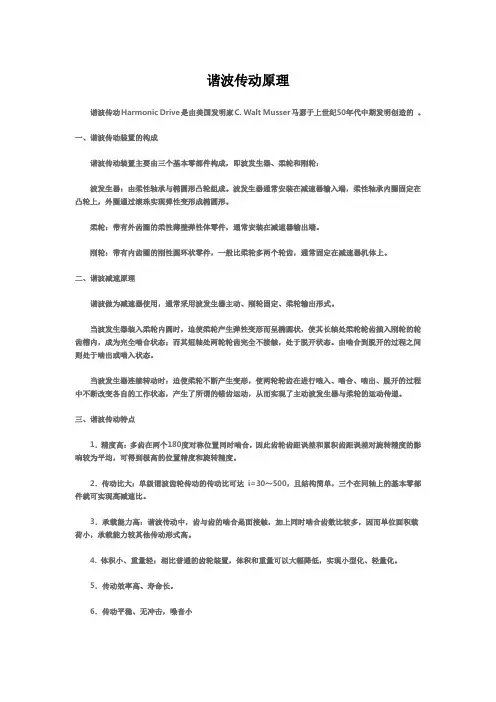
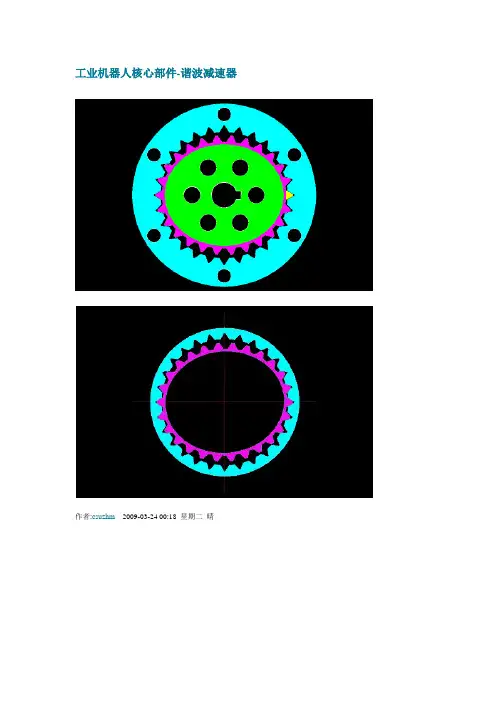
右图1示出一种最简单的谐波传动减速器基本结构,图2表示谐波传动工作原理图。
最简单的谐波减速器(2张)它主要由三个基本构件组成:(1)带有内齿圈的刚性齿轮(刚轮),它相当于行星系中的中心轮;(2)带有外齿圈的柔性齿轮(柔轮),它相当于行星齿轮;(3)波发生器H,它相当于行星架。
作为减速器使用,通常采用谐波发生器主动、刚轮固定、柔轮输出形式。
波发生器H是一个杆状部件,其两端装有滚动轴承构成滚轮,与柔轮1的内壁相互压紧。
4主要优点编辑(1)传动速比大。
单级谐波齿轮传动速比范围为70~320,在某些装置中可达到1000,多级传动速比可达30000以上。
它不仅可用于减速,也可用于增速的场合。
(2)承载能力高。
这是因为谐波齿轮传动中同时啮合的齿数多,双波传动同时啮合的齿数可达总齿数的30%以上,而且柔轮采用了高强度材料,齿与齿之间是面接触。
(3)传动精度高。
这是因为谐波齿轮传动中同时啮合的齿数多,误差平均化,即多齿啮合对误差有相互补偿作用,故传动精度高。
在齿轮精度等级相同的情况下,传动误差只有普通圆柱齿轮传动的1/4左右。
同时可采用微量改变波发生器的半径来增加柔轮的变形使齿隙很小,甚至能做到无侧隙啮合,故谐波齿轮减速机传动空程小,适用于反向转动。
(4)传动效率高、运动平稳。
由于柔轮轮齿在传动过程中作均匀的径向移动,因此,即使输入速度很高,轮齿的相对滑移速度仍是极低(故为普通渐开线齿轮传动的百分之—),所以,轮齿磨损小,效率高(可达69%~96%)。
又由于啮入和啮出时,齿轮的两侧都参加工作,因而无冲击现象,运动平稳。


FeaturesStructureOperating PrincipleTooth behavior and engagement360°One Turn of Wave Generator90°Wave GeneratorStructure of Harmonic Drive Unit (Component Type)Driven by a unique operating principle applying elastodynamics of metals and comprising of only threebasic parts (Wave generator, Flexspline and Circular spline),Harmonic Drive products reveal excellent features not found in other speed reducers.High positioning accuracy, High repeatability Compactness, Light weight, High reduction ratio,High torque capacity, Non-backlash, High efficiency, Quiet operationThe Wave Generator is a thin raced ball bearing fitted onto anelliptical hub serving as a high efficiency torque converter andgenerally mounted onto the input shaft.FlexsplineThe Flexspline is a non-rigid, thin cylindrical cup with external teeth on a slightly smaller pitch diameter than the Circular Spline.It fits over and is held in an elliptical shape by theWave Generator.Circular SplineThe Circular Spline is a rigid ring with internal teeth, engaging theteeth of the Flexspline across the major axis of the Wave Generator.The Circular Spline has two more teeth thanthe Flexspline and is generally mounted onto a housing.Unlike motions of ordinary gearing, the unique tooth behavior(operating principle) of harmonic drive gearing achieved non-backlashmotion, infinitesimal angular feeding (one-pulse feeding) and highpositioning repeatability. More than 30% of all teeth simultaneouslyengages in two locations in 180°symmetry, thereby allowing high torquecapabillity.0°Circular SplineWave Generato rFlexsplineThe Flexspline is slightly smaller in diameterthan the Circular Spline and usually has twofewer teeth than the Circular Spline. Theelliptical shape of the Wave Generator causesthe teeth of the Flexspline to engage theCircular Spline at two opposite regionsacross the major axis of the ellipse.As the Wave Generator rotates, the zone where the teeth of the Flexspline engages those of the Circular major elliptical axis. For each 180 clockwise movement of the Wave Generator, the Flexspline moves counterclockwise by one teeth relative to the Circular Splin.Each complete clockwise rotation of the Wave Generator results in the Flexspline moving counter-clockwise by two teeth from its original position relative to the Circulr Splineular.Circular SplineHarmonic Drive GearingFlexsplineWave Generator Circular SplineProduct GroupHarmonicDrive PrecisionControl Speed ReducersHarmonic Drive GearingSpeed ReducersDrive System Component / Cup TypeSeriesCSF-GHFDCSGCSDCSFSHGSHFHDUFHDURCSG-2UHCSG-2UHSHG-2UHSHF-2UHSHG-2UJSHG-2UJCSF-1USHG-2SHSHG-2SHSHG-2SOSHF-2SOSHD-2SHHigh-torque TypeSuper Flat TypeStandard TypeHigh-torque TypeStandard TypeStandard TypeStandard TypeSmall and Medium-capacity TypeSmall Capacity TypeGear Head TypeHigh-torque TypeStandard TypeHigh-Torque Hollow Shaft TypeHollow Shaft TypeHigh-Torque Shaft Input TypeShaft Input TypeCompact Double Shaft TypeUnit TypeHigh-torque Hollow Shaft TypeFlat Hollow Shaft TypeHigh-torque Flat TypeFlat TypeSuper Flat Hollow Shaft TypeSimple Unit TypeStandard TypePhase Adjustment UnitProduct LineupCup TypeSilk Hat TypePancake Type★★★★★★★★★★★★★★22★★★18~26001/50~1/16030~5000★★★★★★★★★ ★21★30~40001/50~1/320Product Feature★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★10111213142121★★★★★★★★★★★★★★★23~340012~8201.8~920023~34009.0~8007.8~3309.8~40001/50~1/1601/50~1/1601/30~1/1601/50~1/1601/30~1/1601/50~1/1601/50~1/320★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★———★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★15161718171819★★★★★★★★★★★★★★★★★23~34009.0~260023~34009.0~180023~34009.0~18000.5~281/50~1/1601/30~1/1601/50~1/1601/30~1/1601/50~1/1601/30~1/1601/30~1/100★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★——★★★★★★★★★★★★★★★★★★★★★★★★★1817181720★★★★★★★★★★★★★23~34009.0~180023~34009.0~180012~4501/50~1/1601/30~1/1601/50~1/1601/30~1/1601/50~1/160VariationMoment Stiffness Positioning Accuracy Lightweight Compactness Backlash Page inCatalogVariationTorque-weight Ratio Torsional Stiffness Positioning Accuracy Lightweight Flat Shape HollowStructure Life Page inCatalogCustomizing Peak Torque (Nm)Reduction Ratio Variation Torque-weightRatio Moment Stiffness Positioning Accuracy Lightweight Flat Shape HollowStructure Life Page inCatalog Customizing Peak Torque (Nm)Reduction RatioPeak Torque (Nm)Reduction Ratio Motor Capacity (W)Ease of Mounting Life Variation Torque-weightRatio Moment Stiffness Positioning Accuracy Lightweight Flat Shape HollowStructure Life Page inCatalog Customizing Peak Torque (Nm)Reduction RatioVariation Torque-weightRatio Torsional Stiffness Positioning Accuracy Lightweight Flat Shape HollowStructure Life Page in CatalogCustomizing Peak Torque (Nm)Reduction RatioOpticalGalvano Scanners Servo Drivers ControlSystems Rotary Systems Direct Transmission Systems Actuators Sensors LSARP-BRHFHA -Cmini FHA-C RSF•RKFLBC LA LAH -46LNPLAH -80High Accuracy, High Response Position and Speed ControlWith Shaft Control FunctionFor Position Control Only For Position Control OnlyFor AC Servomotors For DC Servomotors Compact Cylinder Type Stepping Motors Compact Cylinder Type DC Servomotors Compact Hollow Shaft Flat TypeHollow Shaft Flat TypeCompact Cylinder Type AC Servomotors AC ServomotorsDC Servomotors Stepping Motors High-thrust Positioning Type Low-thrust Positioning TypeMedium-thrust Positioning TypeLow-thrust Positioning Type High-thrust Positioning TypeHigh-Resolution Absolute Angle Detection Super-compact Encoders, Micro Encoders MIT SeriesMicro EncoderHA -655 Series HA -675 Series HA -520 SeriesHS -360 Series SeriesProduct Group★★★★★★★★★★★★★★★★★31★★★1.8~8.50.0082~0.05CE,ULCE,UL ★★★★★★★★★★★★★★★★★★★34343434★★★★★★★★29★★8.3~5435~70280.39~20180~50★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★252627★★★★★★★★1.8~2839~6901.5~330200~6096~3530~60 ★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★★3030303030★★★★★★★★★★6000~120004939210kg30006000~12000493921.5300010~200.9~100.9~1013~150.9~10★★★★★★★★★★★★★★★★★3233★★★★★★★★★The combinations with actuator and driver may not fully be complied with foreign safety standards. Please contact our sales office.★★★★★★★★★★★★★Maximum Driving Force (N)Maximum Speed (mm/s)Stroke (mm)Peak Torque (Nm)Maximum Speed (rpm)Peak Torque (Nm)Maximum Speed (rpm)VariationRepeatability Resolution Moment Stiffness Servo Performance Hollow Structure Thinness Lightweight Page in CatalogVariationRepeatability Resolution Stiffness Compactness Lightweight Page in Catalog Repeatability Linearity Stiffness Servo Performance Drift Characteristic Compactness Lightweight Moment of Inertia (g •cm)Torque Constant (N •m/A)Page in CatalogRobustness Super Long Life Resolution Compactness Lightweight Compatibility toHost Computer Absolute Detection System Incremental System Page inCatalogVariationPage in Catalog Repeatability Resolution Moment Stiffness Servo Performance Hollow Structure ThinnessLightweight Compactness Page in CatalogInterface to Absolute Interface to Incremental International Safety Standard Functional Versatility Display Function Valve Position Command Analog Speed Command Mono-shaft Control (Command)Compactness Peak Torque (Nm)Maximum Speed (rpm)VariationPage in Catalog Repeatability Resolution Moment Stiffness Servo Performance Hollow Structure Thinness Lightweight CompactnessHarmonic Drive Gearing CSG (P10)CSD (P11)CSF (P12)SHF (P14)SHG (P13)HDUF (P21)HDUR (P21)CSG-2UH (P15)CSF-2UH (P16)SHF-2UH (P18)SHG-2UH (P17)CSF-1U (P19)SHD-2SH (P20)CSF-GH (P24)HPG (P25)Gear Head TypeHDB (P22)HDT (P23)Infi nit-Indexer (P26)Rotary Servo ActuatorsFHA-C mini (P27)FHA-C (P28)RSF (P30)RHS-25 (P32)RFS-25 (P32)RH (P30)LBC (P36)LA (P36)LAH-46 (P36)LAH-80 (P36)LNP (P36)Optical Galvano Scanners SensorsLSA (P37)MIT (P38)Micro Encoder (P39)Servo DriversHA-655 HA-675 (P40)HA-520 (P40)HS-360 (P40)Powerhub (P29)HHA Chamberlink™ (P33)LPA (P34)• Compact and simple design • High torque capacity • High stiffness • Non-backlash • High positioning and rotational accuracies To realize a high load capacity and high reliability, the torque capacity has been increased by 30%. Units that allow easy mounting are also available. (See page 15.)Li f e : 10,000hPermissible Maximum Momentary T orque Average Ratcheting T orque Permissible Peak T orque Rated T orque Life (Hours)CSG Series Component/Cup Type - High-torque Type Speed reducer• Super thin• Hollow structure• High repeatabilityResponding to the market needs, seven models of the new Harmonic Drive CSDseries have been succeeded in downsizing.The CSD series is designed for applications requiring ultra compact size.L i f e : 7,000hH a r m o n i c D r i v e G e a r i n g C S D S e r i e s •CSD Series RatingsCSD SeriesComponent/Cup Type - Super Flat Type Speed reducer Ha r m o n i c D r i v e G e a r i n g C S D S e r i e s•CSF Series Ratings• Compact• High torque capacity• High stiffness• Non-backlash• High positioning and rotational accuracies• Coaxial input and outputFor downsizing purpose, the axial length has been reduced to aboutone half. Units that allow easy mounting are also available. (See page 16.)L i f e: 7,000hCSF SeriesComponent/Cup Type - Standard Type Speed reducer•Permissible Maximum Momentary Torque Average Ratcheting Torque Permissible Peak Torque Rated Torque Life (Hours)• Large bore with hollow hole, flat shape• Non-backlash• Excellent positioning and rotational accuracies• Coaxial input and output shaft• Compact and simple design• High torque capacity• High stiffnessTo realize a high load capacity and high reliability, the torquecapacity has been increasedL i f e : 10,000hSHG SeriesComponent/Silk Hat Type - High-torque Type Speed reducer Ha r m o n i c D r i v e S H G G e a r i n g S e r i e s•SHF Series RatingsPlease contact Harmonic Drive LLCfor a detailed catalog of this product.• Large bore with hollow hole, flat shape • Compact and simple design • Non-backlash • High torque capacity • High positioning and rotational accuracies • High stiffness • Coaxial input and output shaft To minimize the space of machines and systems and for a total cost reduction, the SHF series has achieved a large bore with hollow hole and flat shape. Units thatallow easy mounting are also available. (See page 18.)L i f e : 7,000hSHF SeriesComponent/Silk Hat Type - Standard Type Speed reducer•CSG Series Ratings• “Basic dynamic rated load” is a constant stationary radial load that achieves a basic dynamic rated life of the bearing of one million revolutions.“Basic static rated load” is a static load that achieves a contact stress of a constant level (4kN/mm 2) at the center of a contact zone between the rolling element receiving a maximum load and track.• The moment stiffnesses are mean values.•Cross Roller Bearing SpecificationPlease contact Harmonic Drive LLC for a detailed catalog of this product.• High torque capacity• High stiffness • Compact and simple design• Non-backlash• High positioning and rotational accuracies • Coaxial input and outputTo realize of a high load capacity and high reliability, the torque capacity hasbeen increased by 30%.L i f e : 10,000hCSG SeriesUnit/High-torque Type Speed reducer Ha r m o n i c D r i v e G e a r i n g C S F S e r i e s• “Basic dynamic rated load” is a constant stationary radial load that achieves a basic dynamic rated life of the bearing of one million revolutions.“Basic static rated load”is a static load that achieves a contact stress of a constant level (4kN/mm 2) at the center of a contact zone between the rolling element receiving a maximum load and track.• The moment stiffnesses are mean values.L i f e : 7,000hTo meet with minimum space requirement, the axial length has been reduced to about one half.• Compact and simple design • High torque capacity • High stiffness• Non-backlash• High positioning and rotational accuracies• Coaxial input and output CSF Series Unit/Standard Type Speed reducer• “Basic dynamic rated load” is a constant stationary radial load that achieves a basic dynamic rated life of the bearing of one million revolutions.“Basic static rated load” is a static load that achieves a contact stress of a constant level (408kN/mm 2) at the center of a contact zone between the rolling element receiving a maximum load and track.To realize a high load capacity and high reliability, the torque capacity has beenincreased by 30%.• Large bore with hollow hole, flat shape• Non-backlash• High positioning and rotational accuracies• Coaxial input and output• Compact and simple design• High torque capacity• High stiffnessL i f e : 10,000hSHG SeriesUnit/High-torque Hollow Shaft, High-torque Shaft Input Types Simple Unit/High-torque Flat, Hollow, High-torque Flat TypesSHG-2UH Speed reducer Ha r m o n i c D r i v e G e a r i n g C S F S e r i e s•SHF Series Ratings• “Basic dynamic rated load” is a constant stationary radial load that achieves a basic dynamic rated life of the bearing of one million revolutions.“Basic static rated load” is a static load that achieves a contact stress of a constant level (408kN/mm 2) at the center of a contact zone between the rolling element receiving a maximum load and track.•Cross Roller Bearing SpecificationTo minimize space for machines and systems and a total cost reduction,the SHF series has achieved a large bore with hollow hole and flat shape.• Large bore with hollow hole, flat shape • Non-backlash• High positioning and rotational accuracies• Coaxial input and output• Compact and simple design• High torque capacity • High stiffness L i f e : 7,000hSHF Series Unit/Hollow Shaft, Shaft Input Types Simple Unit/Flat-hollow, Flat Types Speed reducerTo realize a minimum space requirement, the axial length has been reduced to about one half.Four compact models are available in this mini series.• Non-backlash, high positioning and rotational accuracies• Compact, lightweight, high torque capacity• High load capacity• Compact 4-point contact ball bearing mounted in main shaft• Versatile reduction ratio range and shapes to meet with various applicationsL i f e : 7,000h CSF mini SeriesUnit/Compact Double Shaft Type Gear Head Type/Small Capacity TypeCSF-1U CSF-2XH Speed reducer Ha r m o n i c D r i v e G e a r i n g C S F m i n i S e r i e s•SHD Series Ratings• “Basic dynamic rated load” is a constant stationary radial load that achieves a basic dynamic rated life of the bearing of one million revolutions.“Basic static rated load”is a static load that achieves a contact stress of a constant level (4kN/mm 2) at the center of a contact zone between the rolling element receiving a maximum load and track.•Cross Roller Bearing SpecificationA simple unit type comprised of a cross roller bearing of high moment stiffness on the output side. Six models are available in the series.• Super flat shape • Hollow structure • High positioning accuracyL i f e : 7,000hSHD Series Simple Unit/Super Flat, Hollow Type Speed reducer•HUUF , HDUR Series RatingsHDUF HDUR Component/Pan Cake Standard Type • Unit/Phase Adjusting Unit Standard Type The HDUF and HDUR series are designed fl at and thin as a component tobe installed in a customer-supplied assembly.L i f e :3,000hSpeed reducer Ha r m o n i c D r i v e G e a r i n g H D U F , H D U R S e r i e s HDUF and HDUR Series• The HDB series achieves a 1:1 gear ratio• Precise phasing between input and output is achieved• HDB Series RatingsHDB Series• Zero backlash• Precise positional accuracy• Large center through hole• High ratio• High torque• ± 5 arc second repeatability• HDT Series RatingsHDT SeriesHa r m o n i c D r i v e G e a r i n g H D TThis quick connect design allows easy installation and mounting of a wide variety of servo motors.• Easy mounting with servomotors manufactured by various manufacturers • Versatile variation • Excellent sealed structure • Non-backlash • High moment capacity L i f e : 7,000hCSF-GH Series High-performance Gear Head/Small- and Medium-capacity Motor Type for Servomotors The CSF-GH series is designed to mount to a range of servo motors with output powerranging from 30W to 5000W.Speed reducer• Highly accurate Planetary gearhead• Short delivery (Some models can be delivered in one week)• High torque capacity• High moment capacity• Easy mounting with servomotors manufactured by variousmanufacturers• Low backlash: Less than 3 arc min (less than 1 minute option)• High efficiency, 90% or higher. (85% only for Model 14)• Excellent sealed structure• Double shaft type as new modelL i f e: 20,000hHPG SeriesHigh-performance Gear Head Type/Small-and Medium-capacity Motors for ServomotorsThe HPG series is designed to mount to a range of servo motors with output power ranging from30W to 5000W.Speed reducerHarmonicPlanetaryHPGSeriesSpeed reducer •3 Models, 6 Bore Sizes Available From StockInputOutputTo operate, hand rotate the adjusting ring in eitherdirection to produce a 100:1 reduction between the ringand the output. Adjust the friction adjustment/lockingscrew to desired resistance. For some applications,one djustment will be suffi cient for both shaft turningand phase adjusting modes. For more severe loading,such as hard stopping or higher torques, the frictionadjustment/locking screw may be used to lock theadjusting ring in place to maintain phase.• Fine tune rotational position of shafts and machine parts• Phase cams• Adjust roll registration• Take up backlash in spur and worm gears• Synchronize indexing devicesInfi nit-Indexers® are available from immediately from stock in the standard bore sizes shown,with keyways and set screws, and tapped holes for face mounting of either hub. It is possiblefor the user to modify these confi gurations by disassembling the unit. The hub material islow carbon mild steel suitable for each size are shown in notes to the dimensional drawings.Additional sizes and confi gurations are available by special order.IN-LINE SHAFT IN-LINE SHAFT CONCENTRIC SHAFTFlexible CouplingsAdapterInfi nit-Indexer® Phase AdjusterHDI Size L DIM-10 1.09-25 1.34-50 1.43•FHA-C mini Series Ratings• 1 The figures in the table are those at the output shaft.• 2 The figures are measured when combined with an HA-655 servo driver.• 3 The figures are typical values.• 4 The quad encoder resolution is obtained by the formula (motor encoder resolution) x4 x (reduction ratio)This series servo actuators are comprised of harmonic drive components for precise motioncontrol and super-flat AC servo motors. The body width is less than half of old models andhas a large through hole in the center of the shaft through which electric cables, air pipe,and even laser beam can be passed through this through hole to simplify the entirestructure of the machine and system.The FHA-mini series is designed to operate with a wide range of third-party drivers, as wellas Harmonic Drive LLC’s HA655 and HA675 drivers.FHA-C mini SeriesAC Servo Actuators Actuators AC S e r v o A c t u a t o r F H A -C m i n i S e r i e s•• 1 The figures in the table are those at the output shaft.• 2 The figures are measured when combined with an HA-655 servo driver.• 3 The figures are typical values.• 4 The quad encoder resolution is obtained by the formula (motor encoder resolution) x4 x (reduction ratio)This series servo actuators are comprised of Harmonic drive components for precise motion control and super-flat AC servo motors. The body width is less than half of old models and has a large through hole in the center of the shaft through which electric cables, air pipes, and even laser beam can be passed through this through hole to simplify the entire structure of the machine and system.The FHA-C series is designed to operate with a wide range of third party drivers as well as Harmonic Drive LLC’s HA655 and HA675 drivers.FHA-C Series AC Servo Actuators Actuatos•Specifi cationsBenefi ts of the PowerHub include:• High torque• Positional accuracy• Fast response• Smooth, repeatable performance• More compact than competitive products• Handles large thrust and moment loadsActuatorsPowerHub™Po w e r H u b ™ H a r m o n i c D r i v e S e r v o A c t u a t o rAC Servo Actuators The AC servo actuators in the RSF series are comprised of Harmonic drive component for precise motion control and an AC servomotor, featuring a high torque, high rotational accuracy in compact design. The RSF series AC servo actuators are best suited as positioning drive for machines and systems that require downsizing.•RSF Series RatingsNote 1: The table shows typical output values of actuators.Note 2: the values in the table above are obtained when it is combined with the combined driver (HA-680-4B-24).Note 3: All values are typical.Note 4: T he moment of inertia is the total value of the motor shaft and Harmonic Drive moment of inertia values converted to the output side.The values in parentheses are for equipment with a brake.Note 5: The encoder resolution is (motor shaft encoder resolution when multiplied by 4) x (gear ratio).RSF Series Actuatos•RH Series RatingsThe DC servo actuator RH series are comprised of Harmonic drive componentfor precision motion control and a DC servomotor, featuring a high torque,high rotational accuracy in compact design compactness. The RH series DCservo actuators are best suited as positioning drive sources for machines andsystems that require downsizing.RH SeriesDC Servo ActuatorsDrawings (DXF) can be downloaded from our home page. URL: DC S e r v o A c t u a t o r R H S e r i e sPlease Note:1) The values are for saturated actuator temperature. Other values are for actuator temperature of 20˚C.2) Maximum allowable values. Under no circumstances may these limits be exceeded.3) Cantilevered load applied at the midpoint of the shaft extension.•RHS/RFS Series DC Servo ActuatorsRHS-25RFS-25• Small, lightweight, and high-torque• Standard lineup of actuators with a brake • Superior positioning precision • Stable controllabilityRHS/RFS Series• Precise positional accuracy• No rotary seals required• Motor removable allowing bake out• Integral feedthrough to vacuum•SpecificationsHHA Chamberlink ®V ac u u m F e ed t h r o u g h Se r v o A c t u a t o r• Less than 1 arc minute positional accuracy• Compact design• Axial length of less than 2.6 inches• Integral high performance brushless servo motor• Double row angular contact output bearings• High axial and moment loads• Superior torque to weight ratio• Adaptable to most controllers• Low vibration• High overhung loadPlease contact factory with more information.•LPA• 1 Varies with the reduction ratio of the Harmonic Drive incorporated in the actuator.• Use the Suruga Seiki Co.,LTD. Micro Module PG Series product for the table.The adopting high precision screw have realized high positioning accuacy to the micron and sub-micron order required in measuring instruments, test and inspection systems, optical equipment, semiconductor and liquid crystal manufacturing equipment.LBC, LA•LAH and LNP Series Precision Linear Actuators LA LNPDrawings (DXF) can be downloaded from our home page. URL: ActuatosOptical Scanners•LSA Series Ratings• 1: All angles are mechanical angles.• 2: Values are at combination with a standard Harmonic driverThe Galvano optical scanner LSA series for high-response andhigh-accuracy optical scanning are comprised of an uniquecompact motor and optical sensor. The combination with adedicated driver allows continuous scanning, random access andother optimal scanning in accordance with command signals.Galvano Optical Scanners LSA SeriesGa l v a n o m e t e r S c a n n e r s L S A S e r i e s•MIT Series RatingsThe MIT series are robust angle detection systems of amagnetic-induction type that can detect an absolute angle. The sensor output signals can be easily connected to a personal computer by a signal conversion circuit of PCI- or ISA-bus compatible.MIT SeriesSignal Converter Circuit• 1: “Windows” is a registered trademark of Microsoft Corp. of the United States.Drawings (DXF) can be downloaded from our home page. URL: •Micro Encoder Series RatingsThe micro encoder series are incremental encoders with the world’s smallestresolution enabling a function for output of three short waves (wavelengths).Micro Encoder SeriesPlease contact Harmonic Drive LLCfor a detailed catalog of this product.Mi c r o E n c o d e r S e r i e sServo Drivers•Servo Driver SpecificationsHA-655 SeriesAC Servo Digital Drivers HA-655 SeriesHA-520 SeriesHA-675 SeriesHS-360 Series DC Servo Drivers HS-360 Series•Combinations with Actuator and DriverRotary ActuatorsGalvano Optical ScannerCombinations with DriverDriverHarmonic Drive LLCw w w.H a r m o n i c D r i v e.n e t • 800-921-333241S e r v o D r i v e rIndustrial robots Amusement robotsRobot peripheral equipmentIndirect drive Hand driveTraveling shaft drive Indexing table Peripheral equipmentIndirect drive Hand drive Vision sensor drive Torque sensing driveTool revolver drive Tool changer drive Tool magazine drive Work positioning equipment Rotary table driveTool positioning equipment driveDirect transmission shaft drive Shaft driveMachining centers Turning centers NC lathesWork transfer systems Grinders EDM systemsBending machines Rolling machines PressesWork transfer systemsBent work driveWork positioning machine driveWork reversing machinePrinting presses Folding machines Paper changing machines Paper positioning machines Paper machinesTension controllers Cutting blade positioning machinesPhase adjusting machines Paper surface/back controlling machineRoller position adjusting machinesRoller height adjustmentHumanoid RobotsRobotsHumanoid RobotsMetal Machine ToolsMetal Working MachinesPrinting, Bookbinding and Paper Processing MachinesApplicationsCSG CSD CSF SHG SHF SHD HPG HP-FCSG CSD CSF SHG SHF SHD HPGFHA-C RSF Micro EncoderCSG CSF SHG SHF HPG FHA-C RSF LAHSHG SHF HPG FHA-C RSF LSACSG CSF SHG SHF FB FR FD HPGFHA-C MITMicro Encoder。
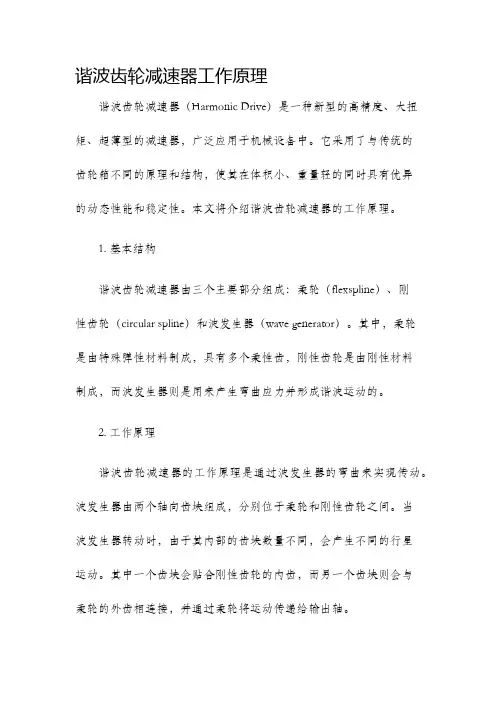
谐波齿轮减速器工作原理谐波齿轮减速器(Harmonic Drive)是一种新型的高精度、大扭矩、超薄型的减速器,广泛应用于机械设备中。
它采用了与传统的齿轮箱不同的原理和结构,使其在体积小、重量轻的同时具有优异的动态性能和稳定性。
本文将介绍谐波齿轮减速器的工作原理。
1. 基本结构谐波齿轮减速器由三个主要部分组成:柔轮(flexspline)、刚性齿轮(circular spline)和波发生器(wave generator)。
其中,柔轮是由特殊弹性材料制成,具有多个柔性齿,刚性齿轮是由刚性材料制成,而波发生器则是用来产生弯曲应力并形成谐波运动的。
2. 工作原理谐波齿轮减速器的工作原理是通过波发生器的弯曲来实现传动。
波发生器由两个轴向齿块组成,分别位于柔轮和刚性齿轮之间。
当波发生器转动时,由于其内部的齿块数量不同,会产生不同的行星运动。
其中一个齿块会贴合刚性齿轮的内齿,而另一个齿块则会与柔轮的外齿相连接,并通过柔轮将运动传递给输出轴。
3. 谐波珠与弹性材料的作用在谐波齿轮减速器中,谐波珠起到了关键的作用。
谐波珠位于波发生器的齿块与柔轮之间,可在齿块与柔轮之间产生高应力的碰撞区域。
当波发生器旋转时,柔轮的齿会受到谐波珠的压力而产生变形,从而使得柔轮产生弯曲。
在弯曲的过程中,谐波珠通过碰撞产生的能量转化为机械能,通过齿轮传递给输出轴。
4. 优点谐波齿轮减速器相对于传统的齿轮箱具有以下几个优点:4.1 高精度:谐波齿轮减速器的传动误差非常小,可以实现非常精确的位置控制。
4.2 大扭矩:谐波齿轮减速器采用双齿轮传动,能够提供大扭矩输出。
4.3 超薄型:谐波齿轮减速器结构紧凑,可节省安装空间。
4.4 高效率:谐波齿轮减速器由于采用了滚动摩擦传动,具有较高的传动效率。
5. 应用领域。
谐波传动原理谐波传动Harmonic Drive是由美国发明家C. Walt Musser马瑟于上世纪50年代中期发明创造的。
一、谐波传动装置的构成谐波传动装置主要由三个基本零部件构成,即波发生器、柔轮和刚轮:波发生器:由柔性轴承与椭圆形凸轮组成。
波发生器通常安装在减速器输入端,柔性轴承内圈固定在凸轮上,外圈通过滚珠实现弹性变形成椭圆形。
柔轮:带有外齿圈的柔性薄壁弹性体零件,通常安装在减速器输出端。
刚轮:带有内齿圈的刚性圆环状零件,一般比柔轮多两个轮齿,通常固定在减速器机体上。
二、谐波减速原理谐波做为减速器使用,通常采用波发生器主动、刚轮固定、柔轮输出形式。
当波发生器装入柔轮内圆时,迫使柔轮产生弹性变形而呈椭圆状,使其长轴处柔轮轮齿插入刚轮的轮齿槽内,成为完全啮合状态;而其短轴处两轮轮齿完全不接触,处于脱开状态。
由啮合到脱开的过程之间则处于啮出或啮入状态。
当波发生器连续转动时:迫使柔轮不断产生变形,使两轮轮齿在进行啮入、啮合、啮出、脱开的过程中不断改变各自的工作状态,产生了所谓的错齿运动,从而实现了主动波发生器与柔轮的运动传递。
三、谐波传动特点1.精度高:多齿在两个180度对称位置同时啮合,因此齿轮齿距误差和累积齿距误差对旋转精度的影响较为平均,可得到极高的位置精度和旋转精度。
2.传动比大:单级谐波齿轮传动的传动比可达i=30~500,且结构简单,三个在同轴上的基本零部件就可实现高减速比。
3.承载能力高:谐波传动中,齿与齿的啮合是面接触,加上同时啮合齿数比较多,因而单位面积载荷小,承载能力较其他传动形式高。
4. 体积小、重量轻:相比普通的齿轮装置,体积和重量可以大幅降低,实现小型化、轻量化。
5.传动效率高、寿命长。
6.传动平稳、无冲击,噪音小编号规格1 品种规格我公司的谐波减速器按照柔轮的形状可分为杯形与中空形两大类,每类又根据柔轮的长度又分为标准和短筒两种型号。
同一种机型包括若干传动比。
2 编号规则产品编号由我司英文缩写、产品形式代号、规格代号、减速比、结构代号及输入端与波发生器凸轮连接形式六部分组成,各部分之间用“-”连接。
工业机器人核心部件-谐波减速器作者:csuzhm2009-03-24 00:18 星期二晴机器人驱动系统要求传动系统间隙小、刚度大、输出扭矩高以及减速比大,常用的减速机构有:1)RV减速机构;2)谐波减速机械;3)摆线针轮减速机构;4)行星齿轮减速机械;5)无侧隙减速机构;6)蜗轮减速机构;7)滚珠丝杠机构;8)金属带/齿形减速机构;9)球减速机构。
其中谐波减速器广泛应用于小型的六轴搬运及装配机械手中,下面介绍其工作原理。
以下内容摘自百度百科(稍有修改):谐波齿轮减速器是利用行星齿轮传动原理发展起来的一种新型减速器。
谐波齿轮传动(简称谐波传动),它是依靠柔性零件产生弹性机械波来传递动力和运动的一种行星齿轮传动。
(一)传动原理它主要由三个基本构件组成:(1)带有内齿圈的刚性齿轮(刚轮)2,它相当于行星系中的中心轮;(2)带有外齿圈的柔性齿轮(柔轮)1,它相当于行星齿轮;(3)波发生器H,它相当于行星架。
作为减速器使用,通常采用波发生器主动、刚轮固定、柔轮输出形式。
波发生器H是一个杆状部件,其两端装有滚动轴承构成滚轮,与柔轮1的内壁相互压紧。
柔轮为可产生较大弹性变形的薄壁齿轮,其内孔直径略小于波发生器的总长。
波发生器是使柔轮产生可控弹性变形的构件。
当波发生器装入柔轮后,迫使柔轮的剖面由原先的圆形变成椭圆形,其长轴两端附近的齿与刚轮的齿完全啮合,而短轴两端附近的齿则与刚轮完全脱开。
周长上其他区段的齿处于啮合和脱离的过渡状态。
当波发生器沿图示方向连续转动时,柔轮的变形不断改变,使柔轮与刚轮的啮合状态也不断改变,由啮入、啮合、啮出、脱开、再啮入……,周而复始地进行,从而实现柔轮相对刚轮沿波发生器H相反方向的缓慢旋转。
在传动过程中,波发生器转一周,柔轮上某点变形的循环次数称为波数,以n 表示。
常用的是双波和三波两种。
双波传动的柔轮应力较小,结构比较简单,易于获得大的传动比。
故为目前应用最广的一种。
谐波齿轮传动的柔轮和刚轮的周节相同,但齿数不等,通常采用刚轮与柔轮齿数差等于波数,即z2-z1=n式中z2、z2--分别为刚轮与柔轮的齿数。
谐波减速器工作原理
谐波减速器采用诸如谐波(harmonic)齿轮或谐波(harmonic)锥齿
轮实现,它是一种摆脱常规减速器的技术,能够在极小的空间内达到高速
减速比。
它的基本工作原理是,维持输入轴在转速不变的情况下,通过转
动谐波齿轮,让出力轴的转速减慢,从而实现高速减速。
谐波减速器具有安装空间小、重量轻、噪音低等优点,主要用于高速减速,如工业机器、CNC机床等场合。
谐波减速器包括谐波齿轮和谐波锥齿轮,
它们的工作原理基本相同,都是通过旋转谐波齿轮或谐波锥齿轮实现减速,谐波齿轮的工作原理是:调整谐波齿轮的位置,使得输入轴与谐波齿轮构
成一个位相差180度的双轴同步系统,两个轴之间的相位差使谐波齿轮获
得高速减速,最终实现低速运动。