基于动态模型按转子磁链定向的矢量控制系统设计指导
- 格式:ppt
- 大小:1.36 MB
- 文档页数:52
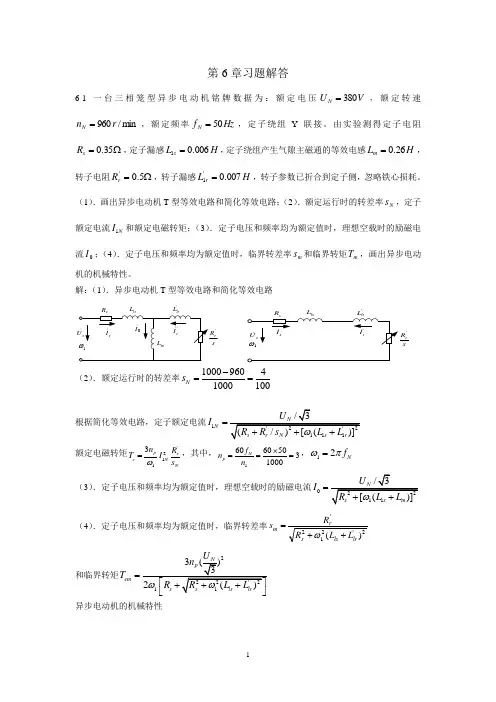
第6章习题解答6-1 一台三相笼型异步电动机铭牌数据为:额定电压V U N 380=,额定转速m in /960r n N =,额定频率Hz f N 50=,定子绕组Y 联接。
由实验测得定子电阻Ω=35.0s R ,定子漏感H L s 006.01=,定子绕组产生气隙主磁通的等效电感H L m 26.0=,转子电阻Ω=5.0'r R ,转子漏感H L r 007.0'1=,转子参数已折合到定子侧,忽略铁心损耗。
(1).画出异步电动机T 型等效电路和简化等效电路;(2).额定运行时的转差率N s ,定子额定电流N I 1和额定电磁转矩;(3).定子电压和频率均为额定值时,理想空载时的励磁电流0I ;(4).定子电压和频率均为额定值时,临界转差率m s 和临界转矩m T ,画出异步电动机的机械特性。
解:(1).异步电动机T 型等效电路和简化等效电路R L 'LL 'L(2).额定运行时的转差率100096041000100N s -==根据简化等效电路,定子额定电流1N I =额定电磁转矩'2113pr e NNn R T Is ω=,其中,160605031000N p f n n ⨯===,12N f ωπ=(3).定子电压和频率均为额定值时,理想空载时的励磁电流0I =(4).定子电压和频率均为额定值时,临界转差率2'212')(lr ls s r m L L R R s ++=ω和临界转矩em T =异步电动机的机械特性eT ns n 1emms 06-2 异步电动机参数如6-1题所示,画出调压调速在12N U 和23N U 时的机械特性,计算临界转差率m s 和临界转矩m T ,分析气隙磁通的变化,在额定电流下的电磁转矩,分析在恒转矩负载和风机类负载两种情况下,调压调速的稳定运行范围。
解:调压调速在12N U 和23N U 时的机械特性T en s临界转差率2'212')(lr ls s r m L L R R s ++=ω12N U 时,临界转矩em T=气隙磁通1ΦSm s N≈23N U 时,临界转矩em T=气隙磁通1ΦSm s N ≈带恒转矩负载L T 工作时,稳定工作范围为0m s s <<,带风机类负载运行,调速范围01s <<。

电力拖动自动控制系统电力拖动自动控制系统简介电力拖动自动控制系统包括:直流调速系统和交流调速系统。
直流调速系统包括:直流调速方法、直流调速电源和直流调速控制。
交流调速系统包括:交流调速系统的主要类型、交流变压调速系统、交流变频调速系统、绕线转子异步电机双馈调速系统——转差功率馈送型调速系统和同步电动机变压变频调速系统。
电力拖动自动控制系统课程内容介绍第一篇直流调速系统闭环反馈直流调速系统1.1 直流调速系统用的可控直流电源根据前面分析,调压调速是直流调速系统的主要方法,而调节电枢电压需要有专门向电动机供电的可控直流电源。
常用的可控直流电源有以下三种:旋转变流机组——用交流电动机和直流发电机组成机组,以获得可调的直流电压。
静止式可控整流器——用静止式的可控整流器,以获得可调的直流电压。
直流斩波器或脉宽调制变换器——用恒定直流电源或不控整流电源供电,利用电力电子开关器件斩波或进行脉宽调制,以产生可变的平均电压。
1.2 晶闸管-电动机系统(V-M系统)的主要问题本节讨论V-M系统的几个主要问题:(1)触发脉冲相位控制;(2)电流脉动及其波形的连续与断续;(3)抑制电流脉动的措施;(4)晶闸管-电动机系统的机械特性;(5)晶闸管触发和整流装置的放大系数和传递函数。
1.3 直流脉宽调速系统的主要问题自从全控型电力电子器件问世以后,就出现了采用脉冲宽度调制(PWM)的高频开关控制方式形成的脉宽调制变换器-直流电动机调速系统,简称直流脉宽调速系统,即直流PWM 调速系统。
(1)PWM变换器的工作状态和波形;(2)直流PWM调速系统的机械特性;(3)PWM 控制与变换器的数学模型;(4)电能回馈与泵升电压的限制。
1.4反馈控制闭环直流调速系统的稳态分析和设计本节提要:转速控制的要求和调速指标;开环调速系统及其存在的问题;闭环调速系统的组成及其静特性;开环系统特性和闭环系统特性的关系;反馈控制规律;限流保护——电流截止负反馈1.5 反馈控制闭环直流调速系统的动态分析和设计反馈控制闭环直流调速系统的动态数学模型;反馈控制闭环直流调速系统的稳定条件; 动态校正——PI调节器的设计;系统设计举例与参数计算转速、电流双闭环直流调速系统和调节器的工程设计方法内容提要:转速、电流双闭环控制的直流调速系统是应用最广性能很好的直流调速系统。
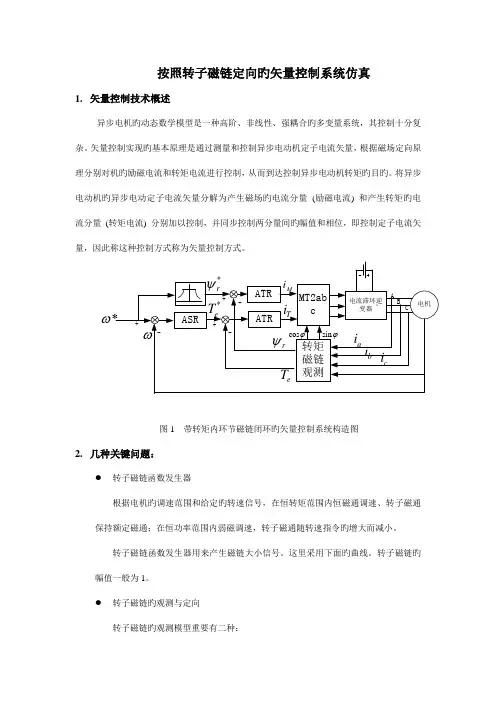
按照转子磁链定向旳矢量控制系统仿真1.矢量控制技术概述异步电机旳动态数学模型是一种高阶、非线性、强耦合旳多变量系统,其控制十分复杂。
矢量控制实现旳基本原理是通过测量和控制异步电动机定子电流矢量,根据磁场定向原理分别对机旳励磁电流和转矩电流进行控制,从而到达控制异步电动机转矩旳目旳。
将异步电动机旳异步电动定子电流矢量分解为产生磁场旳电流分量(励磁电流) 和产生转矩旳电流分量(转矩电流) 分别加以控制,并同步控制两分量间旳幅值和相位,即控制定子电流矢量,因此称这种控制方式称为矢量控制方式。
ω图1 带转矩内环节磁链闭环旳矢量控制系统构造图2.几种关键问题:●转子磁链函数发生器根据电机旳调速范围和给定旳转速信号,在恒转矩范围内恒磁通调速、转子磁通保持额定磁通;在恒功率范围内弱磁调速,转子磁通随转速指令旳增大而减小。
转子磁链函数发生器用来产生磁链大小信号。
这里采用下面旳曲线。
转子磁链旳幅值一般为1。
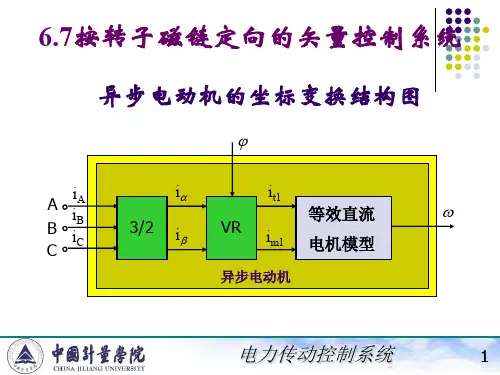
●转子磁链旳观测与定向转子磁链旳观测模型重要有二种:(1) 在两相静止坐标系上旳转子磁链模型电机旳定子电压和电流由传感器测得后,通过3S/2S 变换,再根据异步电机在两项静止坐标系下旳数学模型,计算转子磁链旳大小。
()r αm s αr r βr 11L i T T p ψωψ=-+ ()r βm s βr r αr 11L i T T p ψωψ=++ (2) 按磁场定向两相旋转坐标系上旳转子磁链模型三相定子电流 iA 、 iB 、iC 经3/2变换变成两相静止坐标系电流 is α 、 is β ,再经同步旋转变换并按转子磁链定向,得到M ,T 坐标系上旳电流 ism 、ist ,运用矢量控制方程式m st1s r rL i T ωωωψ-==mr smr 1L i T p ψ=+可以获得 ψr 和 ωs 信号,由ωs 与实测转速 ω 相加得到定子频率信号ω1,再经积分即为转子磁链旳相位角ϕ ,它也就是同步旋转变换旳旋转相位角。
电力拖动自动控制系统课程设计学院:信息与电气工程学院班级:电气三班学号:姓名:基于交流电动机的动态模型的间接矢量控制仿真与设计一设计目的:应用所学的交、直流调速系统的基本知识与工程设计方法,结合生产实际,确定系统的性能指标与实现方案,进行运动控制系统的初步设计。
应用计算机仿真技术,通过在MATLAB软件上建立运动控制系统的数学模型,对控制系统进行性能仿真研究,掌握系统参数对系统性能的影响。
在原理设计与仿真研究的基础上,应用PROTEL进行控制系统的印制板的设计,为毕业设计的综合运用奠定坚实的基础二设计参数:额定输出功率17KW;定子绕组额定线电压380V;定子绕组额定相电流25A;定子绕组每相电阻0.1欧姆;定子绕组接线形式Y;转子额定转速1430rpm;转子形式:鼠笼式;转子每相折算电阻:1欧姆;转子折算后额定电流50A;额定功率因数:0.75;电机机电时间常数1S;电枢允许过载系数1.5;环境条件:电网额定电压:380/220V; 电网电压波动10%;环境温度:-40~+40摄氏度; 环境相对湿度:10~90%.控制系统性能指标:转差率:3%;调速范围:D=20;电流超调量小于等于5%;空载起动到额定转速时的转速超调量小于等于30%;稳速精度:0.03.三动态模型:(1) 电压方程:ϕP Ri u += (2) 磁链方程:Li =ϕ,i d dLd d L Ri u tiωθ++= (3) 运动方程:tp Ld d n J ω+T=T(4) 转矩方程:i L i n T p θ∂∂=T 21四坐标变换为简化和求解三相异步电机的数学方程,须按图1对电机坐标系的基本方程进行坐标变换,实现电机模型的解耦。
1坐标变换模块图:2W1生成模块:3PI模块变换:4Um,UM 生成模块:图1 永磁容错电机常用坐标系根据坐标变换理论,可得三相静止到两相静止坐标系变换矩阵为⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡---=2323021211322/3ss C (3-1) 两相静止到两相旋转坐标系变换矩阵:⎥⎦⎤⎢⎣⎡-=θθθθcos sin sin cos C 2/s 2r (3-2) 转子初始磁链在各坐标系分量为:⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎦⎤⎢⎣⎡023f q d ψψψ (3-3) 可得电机在两相旋转坐标系下的电压方程、磁链方程、转矩方程如下:⎪⎩⎪⎨⎧++=-+=d s q q q qs d d d p Ri U p Ri U ψωψψωψ (3-4) ⎪⎩⎪⎨⎧=+=q q qfd d d iL i L ψψψ23 (3-5) )(d q q d p e i i n T ψψ-= (3-6)五按转子磁链定向实现异步电机矢量控制按转子磁链定向的坐标系称为MT 坐标系,M 轴与转子磁链方向一致。
运动控制考试复习题及答案(完整版)一、填空题1、控制系统的动态性能指标是指跟随指标和抗扰指标,而调速系统的动态指标通常以抗扰性能指标为主2、直流电机调速方法有变压调速、电枢串电阻调速和弱磁调速。
异步电动机调速方式常见有6种分别是:降压调速、差离合调速、转子串电阻调速、串级调速和双馈电动机调速、变级调速、变压变频调速。
其中转差率不变型有:变级调速、变压变频调速,只有变压变频应用最广,可以构成高动态性能的交流调速系统。
同步电动机按频率控制方式不同分为:他控式变频调速和自控式变频调速。
(变电阻调速:有级调速。
变转差率调速:无级调速。
调压调速:调节供电电压进行调速)按按转差功率可以怎么划分电动机:转差功率消耗型、转差功率不变型、转差功率馈送型3、对于异步电动机变压变频调速,在基频以下,希望维持气隙磁通不变,需按比例同时控制定子电压和定子频率,低频时还应当抬高电压以补偿阻抗压降,基频以下调速属于恒转矩调速;而基频以上,由于电压无法升高,只好仅提高定子频率而迫使磁通减弱,相当直流电动机弱磁升速情况,基频以上调速属于恒功率调速。
4、对于SPWM型逆变器,SPWM的含义为正弦波脉宽调制,以正弦波作为逆变器输出的期望波形,SPWM波调制时,调制波为频率和期望波相同的正弦波,载波为频率比期望波高得多的等腰三角波,SPWM型逆变器控制方式有同步调制、异步调制、混合调制。
SPWM型逆变器的输出的基波频率取决于正弦波。
SPWM控制技术包括单极性控制和双极性控制两种方式。
5、调速系统的稳定性能指标包括调速范围和静差率6、供变压调速使用的可控直流电源有:旋转交流机组(G-M系统)、静止式可控整流器(V-M系统)与直流斩波器(PWM-M系统)或脉宽调制变换器。
7、典型I型系统与典型II型系统相比,前者跟随性能好、超调小,但抗扰性能差。
典型I型系统和典型Ⅱ型系统在稳态误差和动态性能上有什么区别?答:稳态误差:对于典型I型系统,在阶跃输入下,稳态时是无差的;但在斜坡输入下则有恒值稳态误差,且与K值成反比;在加速度输入下稳态误差为∞。
一、填充题:1. 运动控制系统由电动机、功率放大与变换装置、控制器及相应的传感器等构成。
2. 转矩控制是运动控制的根本问题,磁链控制与转矩控制同样重要。
3. 生产机械常见的三种负载是恒转矩负载、恒功率负载和平方率负载。
4. 某直流调速系统电动机额定转速1430/min N n r =,额定速降115/minN n r ∆=,当要求静差率30%s ≤时,允许的调速范围为5.3,若当要求静差率20%s ≤时,则调速范围为3.1,如果希望调速范围达到10,所能满足的静差率是44.6%。
5. 数字测速中,T 法测速适用于 低速,M 法测速适用于高速 。
6. 生产机械对调速系统转速控制的要求有 调速 、稳速和加减速 三个方面。
7.直流电机调速的三种方法是:调压调速、串电阻调速和弱磁调速。
8.双闭环直流调速系统的起动过程分为 电流上升阶段、恒流升速阶段和 转速调节 三个阶段。
9.单闭环比例控制直流调速系统能够减少稳态速降的实质在于它的自动调节作用,在于它能随着负载的变化而相应的 改变电枢电压,以补偿电枢回路电阻压降的变化。
1.恒压频比控制方式是指给异步电动机供电的电压和 频率 之比为常数。
10.异步电机基于稳态模型的控制方法有调压调速和变压变频调速;基于动态数学模型的高性能控制方法有FOC 和DTC 。
11.异步电动机变压变频调速控制特性曲线中,基频以下调速称为恒 转矩 调速,基频以上调速称为恒功率调速。
12.控制变频器逆变部分的常见的脉冲宽度调制技术有(1)以追求电压正弦为目的的SPWM 控制技术,(2)以追求电流正弦为目的的CFPWM 控制技术,(3)以追求磁链正弦为目的的SVPWM 控制技术。
13.转差频率控制的两个基本特点是:(1)定子电压和频率比协调控制保持空隙磁通恒定,(2)气隙磁通不变时,电磁转矩与转差频率成正比。
14.电磁耦合是机电能量转换的必要条件,电流与磁通的乘积产生转矩,转速与磁通的乘积产生感应电动势。
《电力拖动自动控制系统》教学大纲一、课程基本信息1、课程英文名称:Automation Control System by Power Driving2、课程类别:专业方向课程3、课程学时:总学时64,实验学时84、学分:45、先修课程:《电路原理》、《模拟电子技术》、《数字电子技术》、《电力电子技术》、《电机学》、《控制电机》、《自动控制原理》、《电力拖动基础》等专业基础课程6、适用专业:电气工程及其自动化二、课程的目的与任务课程的教学目的:本课程是电气工程及其自动化专业的专业特色课程。
通过本课程的学习,了解和掌握电力拖动自动控制系统的设计、校正和综合方法,为今后的工作打下专业基础。
课程教学的任务:了解直流电力拖动自动控制系统的特点,调速方法,调速系统的静态动态性能指标。
掌握直流转速单闭自动控制系统和转速、电流双闭环自动控制系统的静、动态设计方法,深刻领会和掌握控制系统的工程设计方法,能够熟练应用典型Ⅰ型、典型Ⅱ系统的设计和校正方法,了解可逆直流调速系统和位置随动系统的特点和设计方法。
了解交流电力拖动自动控制系统的特点,调速方法,特别是重点了解和掌握笼型异步电动机变压变频调速系统的原理、特点和设计方法,了解矢量控制技术在异步电动机变压变频调速系统的应用,了解同步电动机变压变频调速系统的特点和设计方法。
三、课程的基本要求本课程是所有专业基础课程的综合应用,特别是对《电力电子技术》、《电机学》、《控制电机》、《自动控制原理》、《电力拖动基础》以及《模拟电子技术》、《数字电子技术》的基础知识应用较多,学生必须在这些专业基础课程学习过后,才能开设本课程。
教师在授课中必须引导学生对专业基础课程的综合应用,按照系统的控制规律为主线,由简入繁、由低及高的循序深入,思路必须清楚,引导学生学习和掌握系统设计与分析的方法,培养学生对工程问题的处理方法,同时要认真进行和完成课程实验,并且通过课程设计,要求学生能够对简单的电力拖动自动控制系统进行性能分析和设计。
摘要:交流电机矢量控制理论是德国学者K Hass和FBlaschke建立起来的,作为交流异步电机控制的一种方式,矢量控制技术已成为高性能变频调速系统的首选方案。
交流电机的矢量控制技术是基于交流电机的动态模型,通过建立交流电机的空间矢量图,采用磁场定向的方法将定子电流分解为与磁场方向一致的励磁分量和与磁场方向正交的转矩分量,并分别对磁通和力矩进行控制,而使异步电机可以像他励直流电机一样控制。
随着计算机技术飞速发展,功能强大的数字信号处理器(DSP)的广泛应用使得矢量控制逐渐走向了实用化。
本文先对矢量控制系统的原理进行简要说明,然后给出了一种矢量控制系统基于DSP芯片的实现方案,最后例举了一些目前应用较广泛的矢量型变频器。
关键词:矢量控制,DSP,变频器。
目录1.矢量控制 (3)1.1概述 (3)1.2基本原理 (4)1.3坐标变换 (6)2.转差频率矢量控制 (7)3.基于DSP芯片TMS320F2812的矢量控制系统 (11)4.西门子MicroMaster440变频器 (13)参考文献 (15)1.矢量控制1.1概述由于异步电机的动态数学模型是一个高阶、非线性、强耦合的多变量系统。
上世纪70年代西门子工程师F.Blaschke首先提出异步电机矢量控制理论来解决交流电机转矩控制问题。
矢量控制实现的基本原理是通过测量和控制异步电动机定子电流矢量,根据磁场定向原理分别对异步电动机的励磁电流和转矩电流进行控制,从而达到控制异步电动机转矩的目的。
具体是将异步电动机的定子电流矢量分解为产生磁场的电流分量 (励磁电流) 和产生转矩的电流分量 (转矩电流) 分别加以控制,并同时控制两分量间的幅值和相位,即控制定子电流矢量,所以称这种控制方式称为矢量控制方式。
简单的说,矢量控制就是将磁链与转矩解耦,有利于分别设计两者的调节器,以实现对交流电机的高性能调速。
矢量控制方式又有基于转差频率控制的矢量控制方式、无速度传感器矢量控制方式和有速度传感器的矢量控制方式等。