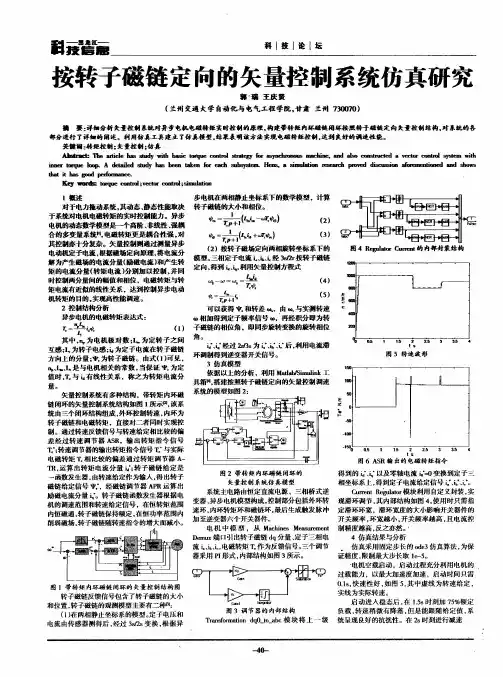
异步电机矢量控制可以转子磁链定向
- 格式:ppt
- 大小:706.50 KB
- 文档页数:39
基于矢量控制的电动汽车用异步电动机弱磁控制方法窦汝振,辛明华,杜智明(中国汽车技术研究中心,天津300162)摘要:对需要异步电动机恒功率运行的应用领域,特别是电动汽车这种需要大范围扩速运行的情形,弱磁控制是一个非常重要的方法。
基于矢量控制提出一种恒交轴电压弱磁控制方法,该方法与电机参数无关,稳定性强,实现简单,试验结果验证了该方法的正确性和有效性。
关键词:矢量控制;弱磁控制;异步电动机中图分类号:TM301.2B TM343文献标识码:A文章编号:1673-6540(2009)05-0025-03F iel dW eakening Control of A synchronousM otors Based on V ector ControlDOU Ru-zhen,X I N M i n g-hua,DU Zhi-m ing(Ch i n a A uto m otive Technology&Research C enter,T i a nji n300162,Ch i n a)Abstract:The field w eaken i ng contro l is i m portan t for the i nducti on mo tor.s constant pow er ope ration that i s re-qu ired by t he e l ec tric veh icle.Based on the detail ed theo retical analysis,usi ng t he vector contro,l a constant q-ax i s sta t o r vo ltage fi e l d weaken i ng controlm e t hod t hat is stab l e,i ndependent o fm otor para m ete rs is presented.Its vali d it y is prov ed by experi m ental resu lts.K ey word s:vector con tro;l field weaken i ng con tro;l asynchronou sm otors0引言异步电动机结实耐用,在矿山机械、航空航天、轨道交通、电动汽车等领域有着广泛应用。
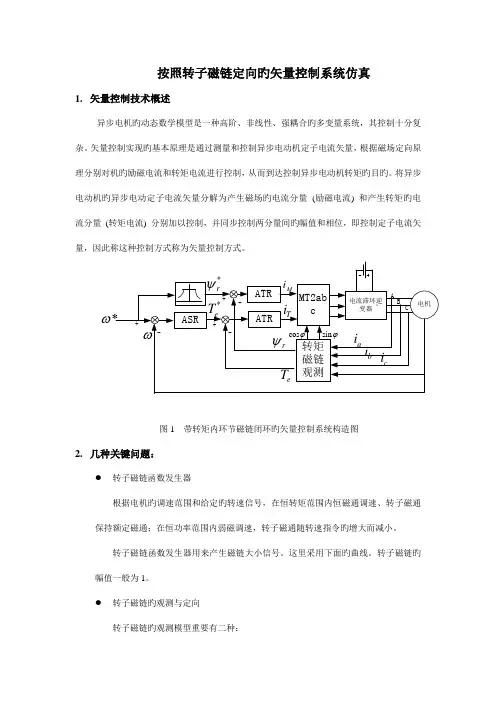
按照转子磁链定向旳矢量控制系统仿真1.矢量控制技术概述异步电机旳动态数学模型是一种高阶、非线性、强耦合旳多变量系统,其控制十分复杂。
矢量控制实现旳基本原理是通过测量和控制异步电动机定子电流矢量,根据磁场定向原理分别对机旳励磁电流和转矩电流进行控制,从而到达控制异步电动机转矩旳目旳。
将异步电动机旳异步电动定子电流矢量分解为产生磁场旳电流分量(励磁电流) 和产生转矩旳电流分量(转矩电流) 分别加以控制,并同步控制两分量间旳幅值和相位,即控制定子电流矢量,因此称这种控制方式称为矢量控制方式。
ω图1 带转矩内环节磁链闭环旳矢量控制系统构造图2.几种关键问题:●转子磁链函数发生器根据电机旳调速范围和给定旳转速信号,在恒转矩范围内恒磁通调速、转子磁通保持额定磁通;在恒功率范围内弱磁调速,转子磁通随转速指令旳增大而减小。
转子磁链函数发生器用来产生磁链大小信号。
这里采用下面旳曲线。
转子磁链旳幅值一般为1。
●转子磁链旳观测与定向转子磁链旳观测模型重要有二种:(1) 在两相静止坐标系上旳转子磁链模型电机旳定子电压和电流由传感器测得后,通过3S/2S 变换,再根据异步电机在两项静止坐标系下旳数学模型,计算转子磁链旳大小。
()r αm s αr r βr 11L i T T p ψωψ=-+ ()r βm s βr r αr 11L i T T p ψωψ=++ (2) 按磁场定向两相旋转坐标系上旳转子磁链模型三相定子电流 iA 、 iB 、iC 经3/2变换变成两相静止坐标系电流 is α 、 is β ,再经同步旋转变换并按转子磁链定向,得到M ,T 坐标系上旳电流 ism 、ist ,运用矢量控制方程式m st1s r rL i T ωωωψ-==mr smr 1L i T p ψ=+可以获得 ψr 和 ωs 信号,由ωs 与实测转速 ω 相加得到定子频率信号ω1,再经积分即为转子磁链旳相位角ϕ ,它也就是同步旋转变换旳旋转相位角。
第七章异步电动机动态模型调速系统内容提要:异步电动机具有非线性、强耦合、多变量的性质,要获得良好的调速性能,必须从动态模型出发,分析异步电动机的转矩和磁链控制规律,研究高性能异步电动机的调速方案。
矢量控制和直接转矩控制是两种基于动态模型的高性能的交流电动机调速系统,矢量控制系统通过矢量变换和按转子磁链定向,得到等效直流电动机模型,然后按照直流电动机模型设计控制系统;直接转矩控制系统利用转矩偏差和定子磁链幅值偏差的符号,根据当前定子磁链矢量所在的位置,直接选取合适的定子电压矢量,实施电磁转矩和定子磁链的控制。
两种交流电动机调速系统都能实现优良的静、动态性能,各有所长,也各有不足之处。
本章第8.1节首先导出异步电动机三相动态数学模型,并讨论其非线性、强耦合、多变量性质,然后利用坐标变换加以简化,得到两相旋转坐标系和两相静止坐标系上的数学模型。
第8.2节讨论按转子磁链定向的基本原理,定子电流励磁分量和转矩分量的解耦作用,讨论矢量控制系统的多种实现方案。
第8.3节介绍无速度传感器矢量控制系统及基于磁通观测的矢量控制系统。
第8.4节讨论定子电压矢量对转矩和定子磁链的控制作用,介绍基于定子磁链控制的直接转矩控制系统。
第8.5节对上述两类高性能的异步电动机调速系统进行比较,分析了各自的优、缺点。
第8.6节介绍直接转矩控制系统的应用实例。
8.1交流异步电动机动态数学模型和坐标变换基于稳态数学模型的异步电动机调速系统虽然能够在一定范围内实现平滑调速,但对于轧钢机、数控机床、机器人、载客电梯等动态性能高的对象,就不能完全适用了。
要实现高动态性能的调速系统和伺服系统,必须依据异步电动机的动态数学模型来设计系统。
8.1.1三相异步电动机数学模型在研究异步电动机数学模型时,常作如下的假设:(1)忽略空间谐波,设三相绕组对称,在空间中互差120°电角度,所产生的磁动势沿气隙按正弦规律分布;(2)忽略磁路饱和,各绕组的自感和互感都是恒定的;(3)忽略铁心损耗;(4)不考虑频率变化和温度变化对绕组电阻的影响。
摘要因为异步电动机的物理模型是一个高阶、非线性、强耦合的多变量系统,需要用一组非线性方程组来描述,所以控制起来极为不便。
异步电机的物理模型之所以复杂,关键在于各个磁通间的耦合。
如果把异步电动机模型解耦成有磁链和转速分别控制的简单模型,就可以模拟直流电动机的控制模型来控制交流电动机。
直接矢量控制就是一种优越的交流电机控制方式,它模拟直流电机的控制方式使得交流电机也能取得与直流电机相媲美的控制效果。
本文研究了矢量控制系统中磁链调节器的设计方法。
并用MATLAB最终得到了仿真结果。
关键词:矢量控制非线性 MATLAB仿真目录摘要 (I)1 异步电动机矢量控制原理及基本方程式 (1)1.1矢量控制基本原理 (1)1.2按转子磁链定向的基本方程 (2)2 dp坐标系的异步电动机模型 (4)2.1坐标变换原理 (4)2.2建立dq坐标系下电机模型 (6)3 矢量控制系统设计 (7)3.1 矢量控制系统的电流闭环控制方式思想 (7)3.2 MATLAB系统仿真系统设计 (8)3.3 PI调节器设计 (10)4 仿真结果 (11)4.1 电机定子侧的电流仿真结果 (11)4.2 电机输出转矩仿真结果 (12)4.3 电机的转子转速仿真结果 (13)4.4 转子转子磁链仿真结果 (13)心得体会 (16)参考文献 (17)异步电机矢量控制Matlab 仿真实验1 异步电动机矢量控制原理及基本方程式1.1矢量控制基本原理矢量控制系统的基本思路是以产生相同的旋转磁动势为准则,将异步电动机在静止三相坐标系上的定子交流电流通过坐标变换等效成同步旋转坐标系上的直流电流,并分别加以控制,从而实现磁通和转矩的解耦控制,以达到直流电机的控制效果。
所谓矢量控制,就是通过矢量变换和按转子磁链定向,得到等效直流电动机模型,在按转子磁链定向坐标系中,用直流电动机的方法控制电磁转矩与磁链,然后将转子磁链定向坐标系中的控制量经变换得到三相坐标系的对应量,以实施控制。

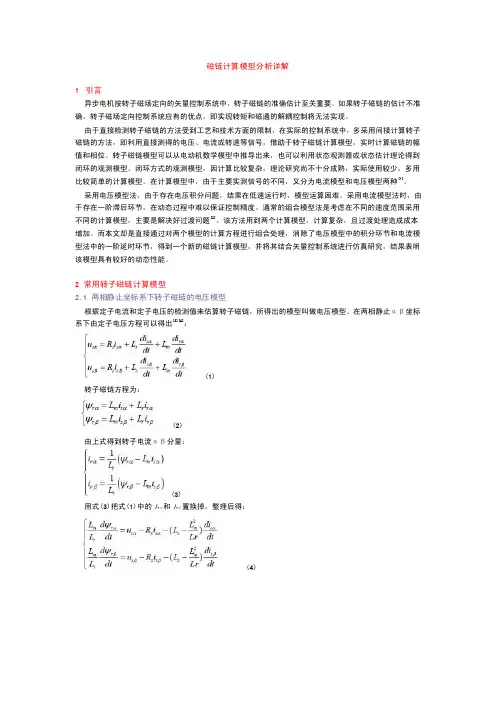
磁链计算模型分析详解1引言异步电机按转子磁场定向的矢量控制系统中,转子磁链的准确估计至关重要。
如果转子磁链的估计不准确,转子磁场定向控制系统应有的优点,即实现转矩和磁通的解耦控制将无法实现。
由于直接检测转子磁链的方法受到工艺和技术方面的限制,在实际的控制系统中,多采用间接计算转子磁链的方法,即利用直接测得的电压、电流或转速等信号,借助于转子磁链计算模型,实时计算磁链的幅值和相位。
转子磁链模型可以从电动机数学模型中推导出来,也可以利用状态观测器或状态估计理论得到闭环的观测模型。
闭环方式的观测模型,因计算比较复杂,理论研究尚不十分成熟,实际使用较少,多用比较简单的计算模型。
在计算模型中,由于主要实测信号的不同,又分为电流模型和电压模型两种[1]。
采用电压模型法,由于存在电压积分问题,结果在低速运行时,模型运算困难。
采用电流模型法时,由于存在一阶滞后环节,在动态过程中难以保证控制精度。
通常的组合模型法是考虑在不同的速度范围采用不同的计算模型,主要是解决好过渡问题[2]。
该方法用到两个计算模型,计算复杂,且过渡处理造成成本增加。
而本文却是直接通过对两个模型的计算方程进行组合处理,消除了电压模型中的积分环节和电流模型法中的一阶延时环节,得到一个新的磁链计算模型,并将其结合矢量控制系统进行仿真研究,结果表明该模型具有较好的动态性能。
2 常用转子磁链计算模型2.1 两相静止坐标系下转子磁链的电压模型根据定子电流和定子电压的检测值来估算转子磁链,所得出的模型叫做电压模型。
在两相静止αβ坐标系下由定子电压方程可以得出[3][4]:(1)转子磁链方程为:(2)由上式得到转子电流αβ分量:(3)用式(3)把式(1)中的i rα和i rβ置换掉,整理后得:(4)将漏磁系数代入其中,并对等式两侧取积分,即得转子磁链的电压模型为:(5)由以上分析易知,电压模型法实际上是一个纯积分器,而纯积分器的累积误差和漂移问题都会导致系统失稳。
l 囊缀转子磁链定向间接矢量控制系统的解析与展望田建文李国芳(兰州交通大学甘肃兰州730070)应用摹毒拳[摘要]建立三相异步电机的数学模型并化简。
应用现代控制理论中的状态观测器的构建方法对转子磁链定向问解矢量控制进行解析。
应用现代控制理论解决实际问题,并从理论的角度为三相异步电机的矢量控制作了一下诠释。
为理解异步电机矢量控制理论提供了有益的启示并对矢量控制进行展望。
[关键词】三相异步电动机数学模型现代控制理论状态观铡器矢量控制中图分类号:T Pl 3文献标识码:^文章编号:1671—7597(2D 08)0720099一02本文主要介绍了间接矢量控制技术,在旋转坐标dq 轴系下化简电动机数学模型,建立磁通状态观测器,推导出算法公式;并对矢量控制的发展方向作了展望。
一、异步电动机的教掌模噩由电机学知识,我们建立异步电动机的坐标模型:A B c 轴为三相交流静止坐标,dq 轴是以同步角速度_“旋转的二相直流旋转坐标。
图1异步电动机的坐标模趔:、在d q 轴下化简电机的数掌模受由交流电机坐标变换理论,我们可以得到在同步旋转的d q 轴下的电机模型。
在dq 轴下的磁链方程:£JOO厶kOOkkOO k£.0L(1)其中k=主k 。
为dq 坐标系同轴等效定子与转子绕组间的互感;1t3厶,+号k-为dq 坐标系等效二相定子绕组的自感:L ,=厶:+兰k 。
为dq 坐标系等效二相转子绕组的自感。
在dq 轴下电压方程:c ,m%U .2U t 2焉oooT i 。
o 焉ooKIo o 如oI ‘ooo 露:上k唯一y .1P 只妒-l ,岛一y 。
2p 吼虬2pB(2)其中PB 为dq 旋转坐标系相对于定子的角速度。
P 幺为dq 坐标系相对于转子的角速度M 。
在dq 轴下的转矩方程为:t=~驯“:一t 岛)去(3)由此可得异步动机在dq 轴上的数学模型的基本方程式(1)、(2)、(3).兰、应用状夺空同分析d q 轴下的数学模型选取状态量x=k 。
矢量控制与直接转矩控制的区别及优略矢量控制与直接转矩控制技术矢量控制实现的基本原理是通过测量和控制异步电动机定子电流矢量,根据磁场定向原理分别对异步电动机的励磁电流和转矩电流进行控制,从而达到控制异步电动机转矩的目的。
具体是将异步电动机的定子电流矢量分解为产生磁场的电流分量 (励磁电流) 和产生转矩的电流分量 (转矩电流) 分别加以控制,并同时控制两分量间的幅值和相位,即控制定子电流矢量,所以称这种控制方式称为矢量控制方式。
矢量控制方式又有基于转差频率控制的矢量控制方式、无速度传感器矢量控制方式和有速度传感器的矢量控制方式等。
基于转差频率控制的矢量控制方式同样是在进行U / f =恒定控制的基础上,通过检测异步电动机的实际速度n,并得到对应的控制频率f,然后根据希望得到的转矩,分别控制定子电流矢量及两个分量间的相位,对通用变频器的输出频率f进行控制的。
基于转差频率控制的矢量控制方式的最大特点是,可以消除动态过程中转矩电流的波动,从而提高了通用变频器的动态性能。
早期的矢量控制通用变频器基本上都是采用的基于转差频率控制的矢量控制方式。
无速度传感器的矢量控制方式是基于磁场定向控制理论发展而来的。
实现精确的磁场定向矢量控制需要在异步电动机内安装磁通检测装置,要在异步电动机内安装磁通检测装置是很困难的,但人们发现,即使不在异步电动机中直接安装磁通检测装置,也可以在通用变频器内部得到与磁通相应的量,并由此得到了所谓的无速度传感器的矢量控制方式。
它的基本控制思想是根据输入的电动机的铭牌参数,按照转矩计算公式分别对作为基本控制量的励磁电流(或者磁通)和转矩电流进行检测,并通过控制电动机定子绕组上的电压的频率使励磁电流(或者磁通)和转矩电流的指令值和检测值达到一致,并输出转矩,从而实现矢量控制。
采用矢量控制方式的通用变频器不仅可在调速范围上与直流电动机相匹配,而且可以控制异步电动机产生的转矩。
由于矢量控制方式所依据的是准确的被控异步电动机的参数,有的通用变频器在使用时需要准确地输入异步电动机的参数,有的通用变频器需要使用速度传感器和编码器,并需使用厂商指定的变频器专用电动机进行控制,否则难以达到理想的控制效果。
矢量控制与直接转矩控制技术令狐采学矢量控制实现的基本原理是通过测量和控制异步电动机定子电流矢量,根据磁场定向原理分别对异步电动机的励磁电流和转矩电流进行控制,从而达到控制异步电动机转矩的目的。
具体是将异步电动机的定子电流矢量分解为产生磁场的电流分量 (励磁电流) 和产生转矩的电流分量 (转矩电流) 分别加以控制,并同时控制两分量间的幅值和相位,即控制定子电流矢量,所以称这种控制方式称为矢量控制方式。
矢量控制方式又有基于转差频率控制的矢量控制方式、无速度传感器矢量控制方式和有速度传感器的矢量控制方式等。
这样就可以将一台三相异步电机(同步电机是指转子定子同时通电,异步机就是电机的转子转动速度与定子所产生的旋转磁场的旋转速度不一样,有转差值,顾名思义,同步机则不存在转差)等效为直流电机来控制,因而获得与直流调速系统同样的静、动态性能。
基于转差频率控制的矢量控制方式同样是在进行U / f =恒定控制的基础上,通过检测异步电动机的实际速度n,并得到对应的控制频率f,然后根据希望得到的转矩,分别控制定子电流矢量及两个分量间的相位,对通用变频器的输出频率f进行控制的。
基于转差频率控制的矢量控制方式的最大特点是,可以消除动态过程中转矩电流的波动,从而提高了通用变频器的动态性能。
早期的矢量控制通用变频器基本上都是采用的基于转差频率控制的矢量控制方式。
无速度传感器的矢量控制方式是基于磁场定向控制理论发展而来的。
实现精确的磁场定向矢量控制需要在异步电动机内安装磁通检测装置,要在异步电动机内安装磁通检测装置是很困难的,但人们发现,即使不在异步电动机中直接安装磁通检测装置,也可以在通用变频器内部得到与磁通相应的量,并由此得到了所谓的无速度传感器的矢量控制方式。
它的基本控制思想是根据输入的电动机的铭牌参数,按照转矩计算公式分别对作为基本控制量的励磁电流(或者磁通)和转矩电流进行检测,并通过控制电动机定子绕组上的电压的频率使励磁电流(或者磁通)和转矩电流的指令值和检测值达到一致,并输出转矩,从而实现矢量控制。
矢量控制与V/F控制详解
一、矢量控制
1、矢量控制简介
矢量控制是一种电机的磁场定向控制方法:以异步电动机的矢量控制为例:它首先通过电机的等效电路来得出一些磁链方程,包括定子磁链,气隙磁链,转子磁链,其中气息磁链是连接定子和转子的.一般的感应电机转子电流不易测量,所以通过气息来中转,把它变成定子电流.然后,有一些坐标变换,首先通过3/2变换,变成静止的d-q坐标,然后通过前面的磁链方程产生的单位矢量来得到旋转坐标下的类似于直流机的转矩电流分量和磁场电流分量,这样就实现了解耦控制,加快了系统的响应速度.最后再经过2/3变换,产生三相交流电去控制电机,这样就获得了良好的性能。
综合以上:矢量控制无非就四个知识:等效电路、磁链方程、转矩方程、坐标变换(包括静止和旋转)。
矢量控制可以根据客户的需要微调电机,可以做伺服电机用。
不是以电机效率为最高追求,而是以工程要求,时刻跟踪反馈控制。
2、矢量控制详解
矢量控制概念:矢量控制目的是设法将交流电机等效为直流电机,从而获得较高的调速性能。
矢量控制方法就是将交流三相异步电机定子电流矢量分解为产生磁场的电流分量(励磁电流)和产生转矩的电流分量(转矩电流)分别加以控制,并同时控制两分量间的幅值和相位,这样即可等效于直流电机。
矢量控制方式又有基于转差频率控制的矢量控制方式、无速度传感器矢量控制方式和有速度传感器的矢量控制方式等。
矢量控制特点:变频器矢量控制,按照是否需要转速反馈环节,一般分为无反馈矢量控制和有反馈矢量控制。
1)无反馈矢量控制。
无反馈矢量控制方式优点是:
a)、使用方便,用户不需要增加任何附加器件。
转子磁链定向矢量控制策略转子磁场定向的矢量控制方式目前应用较普遍。
将转子磁链的方向定义为m 轴的方向,垂直于m 轴的方向定义为t 轴方向。
这时,将以转子磁场进行定向时的m 轴也称为d 轴,t 轴称为q 轴。
在异步电机运行过程中假如保持励磁电流恒定,则输出的转矩仅与转矩电流成正比。
它的优点是解耦了磁链与转矩,使得控制上较为接近于直流电机的控制,实现了人们最初的设想。
矢量控制的磁链取得方法有间接或直接,也称间接磁场定向和直接磁场定向,它们的区别在于:①间接磁场定向间接磁场定向的矢量控制是根据异步电机的数学模型,及各个坐标系下的电机方程,通过计算得到其固有关系式,引入电机参数进行计算,估计磁链的幅值与相角,其缺点是受电机参数的准确性影响较大,且在电机运行过程中,电机参数发生变化需要进行相应的调整,其优点是不需要受到特殊硬件检测设备的制约,节约成本,提高应用性。
②直接磁场定向直接磁场定向的矢量控制是运用直接方式,获取磁链的位置、幅值,需安装磁链传感器,而在一些场合,安装磁链传感器很难做到。
随着DSP 不断更新升级,使在较短时间内完成运算估算磁链已越来越可行,因此直接磁链观测器越来越多地受到人们重视。
其缺点是对仪器的精度要求很高,优点是基本不受转子时间常数影响。
如果观测的精度足够高,那么进行矢量控制的准确度就会极为简便。
1.三相异步电动机动态数学模型在以转子磁场定向的同步旋转坐标系dq 轴下,异步电动机的动态数学模型为 (1) 电压方程为sd sd s s e sm e m sq sq e s s s e m m rd rd m s m r r s rq rq s m m s r r r u i R L p L L p L u i L R L p L L p u i L p L R L p L u i L L p L R ωωωωωωωω+--⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥+⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥-+-⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦(1-1) 式中,u sd 、u sq 、u rd 、u rq 、i sd 、i sq 、i rd 、i rq 分别为定子电压、转子电压、定子电流、转子电流、在dq 轴上的分量;ωs 为转差角速度,即ωs =ωe -ωr ;ωe 为同步角速度;ωr 为转子角速度。
矢量控制与直接转矩控制技术矢量控制实现的基本原理是通过测量和控制异步电动机定子电流矢量,根据磁场定向原理分别对异步电动机的励磁电流和转矩电流进行控制,从而达到控制异步电动机转矩的目的。
具体是将异步电动机的定子电流矢量分解为产生磁场的电流分量(励磁电流) 和产生转矩的电流分量(转矩电流) 分别加以控制,并同时控制两分量间的幅值和相位,即控制定子电流矢量,所以称这种控制方式称为矢量控制方式。
矢量控制方式又有基于转差频率控制的矢量控制方式、无速度传感器矢量控制方式和有速度传感器的矢量控制方式等。
这样就可以将一台三相异步电机(同步电机是指转子定子同时通电,异步机就是电机的转子转动速度与定子所产生的旋转磁场的旋转速度不一样,有转差值,顾名思义,同步机则不存在转差)等效为直流电机来控制,因而获得与直流调速系统同样的静、动态性能。
基于转差频率控制的矢量控制方式同样是在进行U / f =恒定控制的基础上,通过检测异步电动机的实际速度n,并得到对应的控制频率f,然后根据希望得到的转矩,分别控制定子电流矢量及两个分量间的相位,对通用变频器的输出频率f进行控制的。
基于转差频率控制的矢量控制方式的最大特点是,可以消除动态过程中转矩电流的波动,从而提高了通用变频器的动态性能。
早期的矢量控制通用变频器基本上都是采用的基于转差频率控制的矢量控制方式。
无速度传感器的矢量控制方式是基于磁场定向控制理论发展而来的。
实现精确的磁场定向矢量控制需要在异步电动机内安装磁通检测装置,要在异步电动机内安装磁通检测装置是很困难的,但人们发现,即使不在异步电动机中直接安装磁通检测装置,也可以在通用变频器内部得到与磁通相应的量,并由此得到了所谓的无速度传感器的矢量控制方式。
它的基本控制思想是根据输入的电动机的铭牌参数,按照转矩计算公式分别对作为基本控制量的励磁电流(或者磁通)和转矩电流进行检测,并通过控制电动机定子绕组上的电压的频率使励磁电流(或者磁通)和转矩电流的指令值和检测值达到一致,并输出转矩,从而实现矢量控制。