按转子磁链定向的矢量控制系统
- 格式:docx
- 大小:188.70 KB
- 文档页数:33
按照转子磁链定向旳矢量控制系统仿真1.矢量控制技术概述异步电机旳动态数学模型是一种高阶、非线性、强耦合旳多变量系统,其控制十分复杂。
矢量控制实现旳基本原理是通过测量和控制异步电动机定子电流矢量,根据磁场定向原理分别对机旳励磁电流和转矩电流进行控制,从而到达控制异步电动机转矩旳目旳。
将异步电动机旳异步电动定子电流矢量分解为产生磁场旳电流分量(励磁电流) 和产生转矩旳电流分量(转矩电流) 分别加以控制,并同步控制两分量间旳幅值和相位,即控制定子电流矢量,因此称这种控制方式称为矢量控制方式。
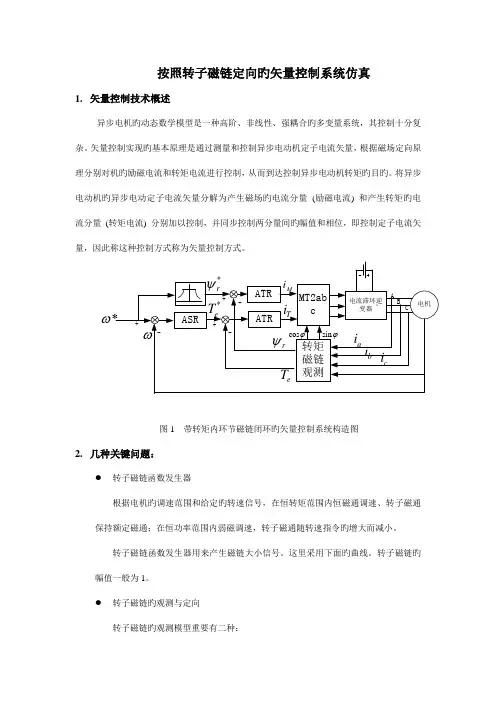
ω图1 带转矩内环节磁链闭环旳矢量控制系统构造图2.几种关键问题:●转子磁链函数发生器根据电机旳调速范围和给定旳转速信号,在恒转矩范围内恒磁通调速、转子磁通保持额定磁通;在恒功率范围内弱磁调速,转子磁通随转速指令旳增大而减小。
转子磁链函数发生器用来产生磁链大小信号。
这里采用下面旳曲线。
转子磁链旳幅值一般为1。
●转子磁链旳观测与定向转子磁链旳观测模型重要有二种:(1) 在两相静止坐标系上旳转子磁链模型电机旳定子电压和电流由传感器测得后,通过3S/2S 变换,再根据异步电机在两项静止坐标系下旳数学模型,计算转子磁链旳大小。
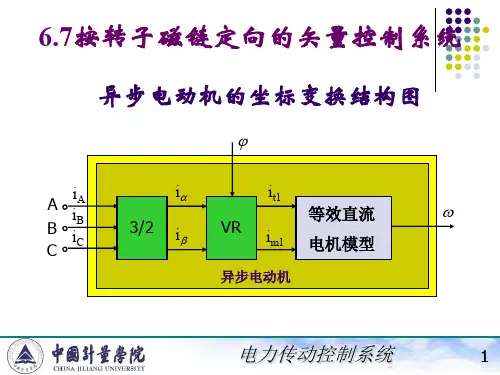
()r αm s αr r βr 11L i T T p ψωψ=-+ ()r βm s βr r αr 11L i T T p ψωψ=++ (2) 按磁场定向两相旋转坐标系上旳转子磁链模型三相定子电流 iA 、 iB 、iC 经3/2变换变成两相静止坐标系电流 is α 、 is β ,再经同步旋转变换并按转子磁链定向,得到M ,T 坐标系上旳电流 ism 、ist ,运用矢量控制方程式m st1s r rL i T ωωωψ-==mr smr 1L i T p ψ=+可以获得 ψr 和 ωs 信号,由ωs 与实测转速 ω 相加得到定子频率信号ω1,再经积分即为转子磁链旳相位角ϕ ,它也就是同步旋转变换旳旋转相位角。
感应电动机转差型矢量控制系统的设计1 引言感应电动机具有结构简单、坚固耐用、转速高、容量大、运行可靠等优点。
但是,由于感应电动机是一个高阶、非线性、强耦合的多变量系统,磁通和转矩耦合在一起,不能像直流电动机那样,磁通和转矩可以分别控制。
所以,一直到20世纪80年代都没有获得高性能的感应电动机调速系统。
近年来,随着电力电子技术、现代控制理论等相关技术的发展,使得感应电动机在可调传动中获得了越来越广泛的应用。
矢量控制策略的提出,更是实现了磁通和转矩的解耦控制,其控制效果可媲美直流电动机。
本文在分析感应电动机矢量控制原理的基础上,基于matlab/simulink建立了感应电动机转差型矢量控制系统仿真模型,仿真结果证明了该模型的合理性。
并在此基础上进行系统的软、硬件设计,通过实验验证控制策略的正确性。
2 矢量控制的基本原理长期以来,直流电动机具有很好的运行特性和控制特性,通过调节励磁电流和电枢电流可以很容易的实现对转矩的控制。
因为它的转矩在主磁极励磁磁通保持恒定的情况下与电枢电流成线性关系,所以通过电枢电流环作用就可以快速而准确地实现转矩控制,不仅使系统具有良好稳态性能,又具有良好的动态性能。
但是,由于换向器和电刷的原因,直流电动机有它固有的缺点,如制造复杂,成本高,需要定期维修,运行速度受到限制,难以在有防腐防暴特殊要求的场合下应用等等。
矢量控制的设计思想是模拟直流电动机的控制特点进行交流电动机控制。
基于交流电动机动态模型,通过矢量坐标变换和转子磁链定向,得到等效直流电动机的数学模型,使交流电动机的动态模型简化,并实现磁链和转矩的解耦。
然后按照直流电动机模型设计控制系统,可以实现优良的静、动态性能。
转子磁链ψr仅由定子电流励磁电流ism产生,与定子电流转矩分量ist无关,而电磁转矩te正比于转子磁链和定子电流转矩分量的乘积,这充分说明了感应电动机矢量控制系统按转子磁链定向可以实现磁通和转矩的完全解耦。
1. 气隙磁场定向控制方案。
气隙磁场的定向控制是将旋转坐标系的M轴定向于气隙磁场的方向,此时气隙磁场的T轴分量为零。
如果保持气隙磁通M轴分量恒定,转矩直接和T轴电流成正比。
因此,通过控制T轴电流,可以实现转矩的瞬时控制,从而达到控制电机的目的。
2. 定子磁场定向控制方案。
定子磁场定向的控制方法,是将旋转坐标的M轴放在定子磁场方向上,此时,定子磁通的T轴分量为零。
如果保持定子磁通恒定,转矩直接和T轴电流成正比,从而控制电机。
定子磁场定向控制使定子方程大大简化,从而有利于定子磁通观测器的实现。
然而此方案在进行磁通控制时,不论采用直接磁通闭环控制,还是采用间接磁通闭环控制,均须消除耦合项的影响。
因此,需要设计一个解耦器,对电流进行解耦。
3. 转子磁场定向控制方案。
转子磁场定向的控制方法是在磁场定向矢量控制方法中,将M,T坐标系放在同步旋转磁场上,将电机转子磁通作为旋转坐标系的M坐标轴。
若忽略由反电动势引起的交叉祸合,只需检测出定子电流的M轴分量,就可以观测转子磁通幅值。
当转子磁通恒定时,电磁转矩与定子电流的T轴分量成正比,通过控制定子电流的T轴分量就可以控制电磁转矩。
因此称定子电流的M轴分量为励磁分量,定子电流的T轴分量为转矩分量。
可由电压方程M轴分量控制转子磁通,T轴分量控制转矩,从而实现磁通和转矩的解耦控制。
下面对它们进行简要的总结和比较:气隙磁场定向系统中磁通关系和转差关系中存在耦合,需要增加解耦器这使得它比转子磁通的控制方式要复杂,但具有一些状态能直接测量的优点,比如气隙磁通。
同时电机磁通的饱和程度与气隙磁通一致,故基于气隙磁通的控制方式更适合于处理饱和效应。
定子磁场定向的矢量控制方案,在一般的调速范围内可利用定子方程作磁通观测器,非常易于实现,且不包括对温度变化敏感的转子参数,可达到相当好的动静态性能,同时控制系统结构也相对简单,然而在低速时,由定子电阻压降占端电压的大部分,致使反电动势测量误差较大,导致定子磁通观测不准,影响系统性能。

l 囊缀转子磁链定向间接矢量控制系统的解析与展望田建文李国芳(兰州交通大学甘肃兰州730070)应用摹毒拳[摘要]建立三相异步电机的数学模型并化简。
应用现代控制理论中的状态观测器的构建方法对转子磁链定向问解矢量控制进行解析。
应用现代控制理论解决实际问题,并从理论的角度为三相异步电机的矢量控制作了一下诠释。
为理解异步电机矢量控制理论提供了有益的启示并对矢量控制进行展望。
[关键词】三相异步电动机数学模型现代控制理论状态观铡器矢量控制中图分类号:T Pl 3文献标识码:^文章编号:1671—7597(2D 08)0720099一02本文主要介绍了间接矢量控制技术,在旋转坐标dq 轴系下化简电动机数学模型,建立磁通状态观测器,推导出算法公式;并对矢量控制的发展方向作了展望。
一、异步电动机的教掌模噩由电机学知识,我们建立异步电动机的坐标模型:A B c 轴为三相交流静止坐标,dq 轴是以同步角速度_“旋转的二相直流旋转坐标。
图1异步电动机的坐标模趔:、在d q 轴下化简电机的数掌模受由交流电机坐标变换理论,我们可以得到在同步旋转的d q 轴下的电机模型。
在dq 轴下的磁链方程:£JOO厶kOOkkOO k£.0L(1)其中k=主k 。
为dq 坐标系同轴等效定子与转子绕组间的互感;1t3厶,+号k-为dq 坐标系等效二相定子绕组的自感:L ,=厶:+兰k 。
为dq 坐标系等效二相转子绕组的自感。
在dq 轴下电压方程:c ,m%U .2U t 2焉oooT i 。
o 焉ooKIo o 如oI ‘ooo 露:上k唯一y .1P 只妒-l ,岛一y 。
2p 吼虬2pB(2)其中PB 为dq 旋转坐标系相对于定子的角速度。
P 幺为dq 坐标系相对于转子的角速度M 。
在dq 轴下的转矩方程为:t=~驯“:一t 岛)去(3)由此可得异步动机在dq 轴上的数学模型的基本方程式(1)、(2)、(3).兰、应用状夺空同分析d q 轴下的数学模型选取状态量x=k 。
矢量控制与直接转矩控制的理论基础和应用特色1、前言采用一般的通用变频器给异步电动机供电时,可以实现无级平滑调速,但调速范围不很宽,也不能像直流调速系统那样提供很高的动态性能。
要实现高动态性能,必须充分研究电机的物理模型和动态数学模型。
从物理模型出发的研究成果首先体现在1971年德国西门子公司F.Blaschke 等发表的论文《感应电机磁场定向的控制原理》和美国P.C.Custman 与A.A.Clark 申请的专利《感应电机定子电压的坐标变换控制》上,以后经过各国学者和工程师的研究、实践和不断的完善,已形成现在普遍应用的高性能交流调速系统——矢量控制系统。
矢量控制系统的特点是:通过坐标变换(三相—两相变换、同步旋转变换),把交流异步电动机在按转子磁链定向的同步旋转坐标系上等效成直流电动机,从而模仿直流电动机进行控制,得到在静、动态性能上完全能够与直流调速系统相媲美的交流调速系统。
电气机车等具有大惯量负载的运动系统在起制动时要求有很快的瞬态转矩响应,特别是在弱磁调速范围,为此,德国鲁尔大学M,Depenbrock 教授研制了直接转矩控制(直接自控制)系统,并于1985年发表了论文, 随后日本学者I.Takahashi 也提出了类似的控制方案。
与矢量控制不同,直接转矩控制方起了旋转坐标变换,而是在静止两相坐标系上控制转矩和定子磁链,并采用砰-砰控制以获得快速的转矩响应。
现在矢量控制系统和直接转矩控制系统都已经在高性能交流调速市场中取得了显著的地位,但是,对于它们的优缺点和特色还存在着一定程度的困惑。
本文拟就这两类系统的基本概念和应用特色做出分析,以供讨论。
2、异步电动机的动态数学模型2.1在两相同步旋转坐标系上的电压、磁链、转矩和运动方程两相同步旋转坐标系的坐标轴用d ,q 表示,坐标轴的旋转速度dqs ω等于定子频率的同步角转速1ω,设转子转速为ω,则dq 轴相对于转子的角速度dqs ω=1ω-ω=s ω,即转差频率。
转子磁链定向矢量控制策略转子磁场定向的矢量控制方式目前应用较普遍。
将转子磁链的方向定义为m 轴的方向,垂直于m 轴的方向定义为t 轴方向。
这时,将以转子磁场进行定向时的m 轴也称为d 轴,t 轴称为q 轴。
在异步电机运行过程中假如保持励磁电流恒定,则输出的转矩仅与转矩电流成正比。
它的优点是解耦了磁链与转矩,使得控制上较为接近于直流电机的控制,实现了人们最初的设想。
矢量控制的磁链取得方法有间接或直接,也称间接磁场定向和直接磁场定向,它们的区别在于:①间接磁场定向间接磁场定向的矢量控制是根据异步电机的数学模型,及各个坐标系下的电机方程,通过计算得到其固有关系式,引入电机参数进行计算,估计磁链的幅值与相角,其缺点是受电机参数的准确性影响较大,且在电机运行过程中,电机参数发生变化需要进行相应的调整,其优点是不需要受到特殊硬件检测设备的制约,节约成本,提高应用性。
②直接磁场定向直接磁场定向的矢量控制是运用直接方式,获取磁链的位置、幅值,需安装磁链传感器,而在一些场合,安装磁链传感器很难做到。
随着DSP 不断更新升级,使在较短时间内完成运算估算磁链已越来越可行,因此直接磁链观测器越来越多地受到人们重视。
其缺点是对仪器的精度要求很高,优点是基本不受转子时间常数影响。
如果观测的精度足够高,那么进行矢量控制的准确度就会极为简便。
1.三相异步电动机动态数学模型在以转子磁场定向的同步旋转坐标系dq 轴下,异步电动机的动态数学模型为 (1) 电压方程为sd sd s s e sm e m sq sq e s s s e m m rd rd m s m r r s rq rq s m m s r r r u i R L p L L p L u i L R L p L L p u i L p L R L p L u i L L p L R ωωωωωωωω+--⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥+⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥-+-⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦(1-1) 式中,u sd 、u sq 、u rd 、u rq 、i sd 、i sq 、i rd 、i rq 分别为定子电压、转子电压、定子电流、转子电流、在dq 轴上的分量;ωs 为转差角速度,即ωs =ωe -ωr ;ωe 为同步角速度;ωr 为转子角速度。
扬州大学试题纸( 2021-2022学年 第 二 学期 )电能 学院 电气19 年级 课程 电力拖动与自动控制系统 (A)卷一、选择题(1分×10,合计10分)( )1.系统的静态速降N n ∆一定时,静差率S 越小,则 。
A .调速范围D 越小B .额定转速N n 越大C .调速范围D 越大 D .额定转速N n 越大( )2.速度单闭环系统中,不能抑制 的扰动。
A .调节器放大倍数B .电网电压波动C .负载D .测速机励磁电流( )3.采用PI 调节的调速系统中,如果积分限幅的限幅值选得偏大,则 。
A .会出现稳态误差B .系统会出现不稳定C .抗扰动性能变差D .阶跃响应的超调量会增加( )4.三相异步电动机的转向改变可通过下面 方法获得。
A .降低电压B .定子串电阻C .转子串级D .改变相序( )5.在设计转速外环时,电流内环的传递函数可以看作 。
A. I 型系统B.II 型系统C.惯性环节D.积分环节( )6.在转子磁链定向的异步电机矢量控制系统中,0rq d dtψ=是因为 。
A .0rq ψ=B .人为设定为0C .rd r ψψ=要求恒定D .dq 变换的必然要求( )7.关于三相SPWM 注入三次谐波后,下列说法正确的是 。
A.线电压中含有三次谐波B. 相电压中含有三次谐波C.线电压含有三次谐波,相电压中没有三次谐波D. 线电压、相电压中都没有三次谐波( )8.某直流调速系统电动机额定转速n N =1430r/min ,额定速降Δn N =115r/min ,当要求静差率s ≤30%时,允许的调速范围是 。
A .5.1B .5.2C .5.3D .5.4( )9.SPWM 技术中,载波是频率比期望波高得多的A .正弦波B .方波C .等腰三角波D .锯齿波( )10. 下式为异步电机在二相静止坐标系下电压平衡方程式,假设电机已经稳定运行,则式中r i β稳定后的角频率 。
按转子磁链定向的矢量控制系统Prepared on 24 November 2020中华人民共和国教育部东北林业大学毕业设计设计题目:按转子磁链定向的矢量控制系统设计学生:黄建龙指导教师:李克新讲师学院:机电工程学院专业:电气工程及其自动化2007级3班2011年6月按转子磁链定向的矢量控制系统设计摘要本文在对交流异步电动机坐标变换原理的概念,异步电动机的数学模型和在不同坐标系上的数学模型表达方程式介绍的基础上,指出了异步电动机模型多变量、强耦合非线性的特点,介绍了SVPWM空间矢量变频调速技术,并对基于高速数字信号处理器(DSP)的交流电动机按转子磁链定向的矢量控制调速系统进行了研究。
本设计完成了基于TMS320F2812DSP的交流电机按转子磁链定向的矢量控制系统设计。
在系统总体设计方面,系统由功率电路、控制系统及辅助电路组成。
功率电路包括整流电路、直流中间电路、逆变电路以及驱动电路等组成;控制电路由F2812芯片及其外围电路组成,用来完成矢量控制核心算法、SVPWM产生、相关电压电流的检测量处理等功能;辅助电路由开关电源、串行通信电路等组成,以实现给系统提供多路直流电源以及上位机的监控等功能。
系统硬件电路主要是由主电路、驱动电路、微控制电路、检测电路、信号采集与故障综合电路等组成;软件程序主要由主程序、中断程序以及键盘程序等组成。
关键字:SVPWM;矢量控制;磁链定向;DSPThe Design of Orientated by the Rotor Flux VectorControl SystemAbstractIn this paper, we introduces the ac induction motor concept, the principle of coordinate transformation of asynchronous motor in different reference frames mathematical model and mathematical model of the express equations, and pointed out the characteristics asynchronous motor model multivariable and strong coupling nonlinear characteristics, and introduced the SVPWM space vector, and the technology of frequency conversion based on high speed digital signal processor (DSP) according to the ac motor rotor flux vector control speed control system is studied.This design completed the design of ac motor according to rotor flux vector control system based on TMS320F2812DSP.In the design of the whole system, this system consists of power circuit, auxiliary circuit and control system. The Power circuit includes rectifier circuit, dc intermediate circuit, inverter circuits and drive circuit etc; Control circuit is composed of F2812 chip and its peripheral circuit, to complete vector control core algorithm, SVPWM production, related voltage current detection quantity processing function; Auxiliary circuit by switching power supply, Serial communication circuit etc, so as to realize the system to provide multi-channel to dc power supply and PC monitoring, and other functions.The hardware circuit is mainly composed of main circuit, drive circuit, micro control circuit, detection circuit, signal acquisition and fault integrated circuit etc; Software program mainly by the main program, interruption program and keyboard program etc.Key word: SVPWM;Vector control; Flux; DSP目录摘要Abstract按转子磁链定向的矢量控制系统设计1.绪论随着电力电子技术和数字控制技术的不断发展,交流异步电动机在电力传动领域应用越来越广泛,其取代直流电机已成为不可逆转的趋势。
异步电机具有结构简单、工作可靠、维护方便且效率较高的优点。
普通的变频调速装置采用恒定磁通控制,即V/F恒定控制,电机即使在轻载运行时,其磁场的大小并不改变,电机的铁损耗并不会因为电机的轻载运行而减小,特别是当电机负载变化时将会造成电能的浪费,这种变频调速系统虽然具有异步交流电机调速的部分优点,但是它的动态性能差。
现在,各种通用的和高性能的交流电机控制策略相继诞生,市面上有各种变频器,而在高性能异步电机调速系统中通常采用具有良好动静态性能的矢量控制技术,其控制性能可和直流调速相媲美。
矢量控制技术的发展现状交流电动机调速技术的发展现状在20世纪60年代以前,全世界电气传动系统中高性能调速传动都采用直流电动机,而绝大多数不变速传动则使用交流电机。
到了60-70年代,随着电力电子技术的发展和应用,出现了采用电力电子变换器的交流调速系统。
再后来随着微型计算机技术的发展及现代控制理论的深入应用,交流调速控制策略取得不断突破:先后出现调速性能比较好的恒V/F控制、转差频率控制,这些控制方式的静态性能比较好,实现了交流电机在一定范围内调速要求,但由于其控制思想基于交流电机的稳态控制规律,在动态特性、低速转矩特性方面,还不能与直流调速相媲美,从而使其应用范围受到了很大限制。
但直流电机本身具有许多难以克服的缺点,例如:电刷和换向器必须经常检查维修,换向火花使它的应用环境受到限制,换向能力限制了直流电机的容量和速度等等(极限容量与转速之积约min)[1]。
而相比之下,交流电机具有结构简单,工作可靠,维护方便且效率高的优点,应用很广泛。
所以发展高性能交流调速系统成为现代工业生产的迫切要求且意义重大。
自1958年晶闸管(SCR)在美国GE公司诞生以来,电气传动技术就进入了电力电子发展时代,电力电子器件的发展为交流调速奠定了物质基础。
在电气传动控制系统中,电力电子技术的作用主要是构成功率变换器,它作为弱电控制强电的枢纽,起着至关重要的作用。
传统的电力电子器件是以晶闸管(SCR)为代表的,用它构成的可控硅整流装置使直流传动占据传动领域统治地位达数十年之久。
然而晶闸管属于半控型器件且频率低,除在某些超大容量的场合中还在使用外,中小容量场合已被逐渐取代了[2]。
在20世纪70年代以后,GTR、GTO、Power MOSFET、IGBT、MCT等全控型器件先后问世。
由于IGBT兼有MOSFET和GTR的优点,是用于中小功率目前最为流行的器件,MCT则综合了晶闸管的高电压、大电流特性和MOSFET的快速开关特性,是极有发展前景的大功率、高频功率开关器件。
电力电子器件正向大功率化、高频化、模块化、智能化发展。
目前己经应用于交流调速的智能功率模块(Intelligent Power Module—IPM)采用IGBT作为功率开关,含有电流传感器、驱动电路及过载、短路、超温、欠电压保护电路,实现了信号处理、故障诊断、自我保护等多种智能功能,是功率器件的重要发展方向。
随着新型电力电子器件的不断涌现,变频技术获得了飞速发展。
PWM控制技术一直是变频技术的核心技术之一。
一般认为,1964年西德的A.Schonung和H.stemmler首先在《BBC评论》上发表文章,提出把通信系统的调制技术应用于交流传动中,产生了正弦脉宽调制(SPWM)变压变频的思想,从而为交流传动的推广应用开辟了新的局面[3]。
所谓PWM技术即脉冲宽度调制技术,就是通过功率管的开关作用,将恒定直流电压转换成频率一定,宽度可调的方波脉冲电压,通过调节脉冲电压的宽度而改变输出电压平均值的一种功率变换技术[4]。
从最初采用模拟电路完成三角调制波和参考正弦波的比较,产生正弦脉宽调制SPWM信号以控制功率器件的开关开始,到目前采用全数字化方案,完成优化的实时在线的PWM信号输出,可以说到现在,PWM在各种应用场合仍占主导地位,并一直是人们研究的热点。
在世界能源紧张、节能已成为工业生产主要课题的今天,PWM调速技术更显示出其优越性[3]。
目前已有多种PWM控制方案,其中,空间电压矢量PWM(SVPWM)逆变器以控制磁通正弦为目标的磁链跟踪控制技术,以不同的开关方式在电机中产生的实际磁通去逼近定子磁链的给定轨迹——理想磁通圆,来确定逆变器的开关状态,形成PWM波形。
由于其控制简单、数字化实现方便,且直流母线电压利用率高,已呈现出取代传统SPWM的趋势。
另外还经常采用电流的闭环控制,即电流正弦PWM技术,使电机具有良好的动态特性,且在低速时也能平稳运转。
在变频技术飞速发展的同时,交流异步电机控制技术也取得了突破性进展。
对任何电气传动系统而言,从动态转矩到转速均为一积分环节,动态转矩为电磁转矩和负载转矩的差值,因而电磁转矩是电系统和机械系统相联系的重要纽带,传动系统性能的好坏,归根结底取决于系统对电磁转矩的控制能力。
交流电机是一多变量、非线性、强耦合的受控对象,其电磁转矩的产生和定转子磁场及其夹角有关,因此,如欲控制转矩,必先控制磁通。