脑电波遥控直升机
- 格式:pdf
- 大小:361.17 KB
- 文档页数:1

遥控直升飞机导言遥控直升飞机是一种通过无线电遥控器控制飞行的小型直升飞机模型。
这种模型飞机通过模仿真实直升飞机的工作原理,使用电动马达来驱动旋翼,并通过遥控器进行飞行控制。
遥控直升飞机主要由机身、旋翼系统、电动马达、电子设备和遥控器等组成。
在本文中,我们将详细介绍遥控直升飞机的工作原理、分类、应用领域以及如何选择和飞行遥控直升飞机。
一、工作原理遥控直升飞机的工作原理和真实的直升飞机大致相同。
它使用电动马达来驱动旋翼系统产生升力,通过变化旋翼系统的转速和角度来控制飞行方向。
遥控器通过发送无线电信号给飞机的接收器,接收器将这些信号转化为相应的控制信号,控制飞机进行上升、下降、前进、后退、转弯等动作。
二、分类根据不同的特点和设计,遥控直升飞机可以分为几个不同的分类。
1. 单旋翼遥控直升飞机:这种类型的直升飞机模型具有一个主旋翼和一个尾翼,类似于真实的直升机。
单旋翼遥控直升飞机的升力主要由主旋翼产生,尾翼用来平衡和控制飞机的方向。
2. 双旋翼遥控直升飞机:这种类型的直升飞机模型具有两个相互平行的旋翼,它们通过主动配平的控制系统协同工作。
双旋翼遥控直升飞机的设计可以提供更好的悬停和稳定性能,但相对较为复杂。
3. 固定翼遥控直升飞机:与真实的飞机相似,这种类型的模型具有固定的机翼和尾翼,通过电动马达驱动螺旋桨来产生升力。
固定翼遥控直升飞机通常需要一定的起飞和降落距离,而且需要一定的飞行技巧来控制。
三、应用领域遥控直升飞机作为一种娱乐和模型飞行器,广泛应用于各个领域。
下面是一些常见的应用领域:1. 娱乐:许多爱好者喜欢在户外或室内飞行遥控直升飞机,享受操控飞行器的乐趣。
这种娱乐活动可以增加人们的技巧和空中冒险的乐趣。
2. 研究:遥控直升飞机也被用于研究目的。
例如,科学家可以使用遥控直升飞机来收集数据、监测环境、进行植被调查等。
3. 搜索和救援:由于其机动性和灵活性,遥控直升飞机经常被用于搜索和救援任务。
它们可以携带相机和其他传感器,提供高清晰度的图像和视频,帮助救援人员定位和评估事故现场。

遥控直升机原理
遥控直升机是一种由地面设备通过无线电信号控制飞行的机器。
它利用了许多物理原理来实现飞行的稳定性和操控的精确性。
首先,遥控直升机的飞行主要依赖于旋翼的工作原理。
旋翼是直升机的飞行器翼,由一个或多个叶片组成。
当旋翼叶片旋转时,产生的升力使直升机从地面垂直起飞,并且在空中保持悬停。
其次,遥控直升机的稳定性与平衡也是通过物理原理实现的。
直升机通过调整旋翼叶片的角度和旋翼的旋转速度来实现前进、后退、左右移动和转弯等操控动作。
通过改变旋翼叶片的攻角,可以调整受力分布,使得直升机能够保持稳定的飞行姿态。
此外,遥控直升机的操控也依赖于空气动力学原理。
直升机通过改变旋翼叶片产生的升力和阻力之间的相对大小来实现高度和方向的控制。
调整旋翼叶片的攻角可以改变升力的大小,从而使直升机升降。
通过改变旋翼叶片的迎角,可以改变阻力的大小,从而使直升机前进、后退以及左右移动。
最后,遥控直升机的操控信号传输是通过无线电信号实现的。
地面遥控器通过操纵杆、按钮等控制装置产生控制指令,并通过无线电信号将指令传输到直升机上的接收机。
接收机接收到信号后,将其转换为电信号,并传输给航空电子设备,从而实现对直升机姿态、速度和方向等的控制。
综上所述,遥控直升机的飞行和操控离不开旋翼的工作原理、
物理原理的平衡和稳定性、空气动力学原理的调整以及无线电信号的传输。
这些原理的应用使得遥控直升机成为一种独特而令人着迷的飞行工具。

遥控直升机原理
遥控直升机是一种通过无线电遥控系统来控制飞行的飞行器。
它基于多个原理,使得飞行器能够在地面上被遥控员远程控制,并完成各项任务。
首先,遥控直升机的飞行原理基于空气动力学。
它通过旋翼的旋转来产生升力,将机身抬离地面。
旋翼的受控旋转由电机提供动力,而叶片的空气动力学设计则能够产生足够的升力来支撑整个飞行器。
其次,遥控直升机的稳定性主要依赖于陀螺仪。
陀螺仪是一种感应器,能够检测到直升机的姿态变化。
一旦直升机开始倾斜或者旋转,陀螺仪就会立即检测到这种变化,并向控制系统发送信号。
控制系统通过调整旋翼的转速和偏航角度来实现飞行器的稳定。
此外,遥控直升机的操控原理基于无线电遥控技术。
遥控器通过发送无线电信号来控制飞行器上的接收器。
接收器接收到信号后,将信号转化为电脉冲,通过连接电机和舵机等执行机构来实现相应的动作。
通过遥控器上的各种操控杆、按钮和旋钮,遥控员可以实现直升机的上升、下降、前进、后退、左转和右转等动作。
最后,遥控直升机的能源一般是电池。
电池提供电能给电机和其他设备,从而保证飞行器的正常运行。
综上所述,遥控直升机的原理可以归纳为空气动力学、陀螺仪、
无线电遥控技术和电池能源等多个方面。
这些原理的协同作用使得遥控直升机能够在空中实现稳定的飞行和精确的操控。

巨型直升机遥控的原理巨型直升机遥控的原理可以分为两个部分,即信号传输和控制执行。
信号传输部分主要包括遥控器和接收器之间的通信,控制执行部分则是接收器将接收到的信号转化为机械动作。
首先,我们来看信号传输的原理。
遥控器通过无线电波与接收器进行通信。
遥控器内部有一个发射器,将发出的信号转化为无线电波,然后通过天线发射出去。
接收器内部有一个接收天线,用于接收无线电波。
接收器接收到信号后,经过信号处理模块对信号进行解码和处理,然后再传递给控制执行部分。
接下来,我们来看控制执行的原理。
接收器收到来自遥控器的信号后,会根据信号的编码解析出对应的控制指令。
控制指令可以包括上升、下降、前进、后退、左转、右转等动作。
接收器将这些指令通过电路转化成机械执行动作。
具体来说,接收器连接了巨型直升机的各种执行机构,如电机、舵机等。
接收器收到指令后,会通过电路控制这些执行机构,实现相应的动作。
在巨型直升机中,电机是其中一个重要的执行机构。
电机通过接收器提供的电信号来控制转动方向和速度。
接收器接收到前进指令时,会将电信号传递给巨型直升机的前进电机,使其转动,从而推动直升机向前飞行。
同样,接收器接收到后退指令时,会将电信号传递给后退电机,使其反向转动,实现直升机的后退动作。
左转和右转的控制也是类似的原理。
在巨型直升机中,舵机也扮演着重要的角色。
舵机主要用于控制直升机的姿态,包括上升、下降、左倾、右倾等。
接收器接收到上升指令时,会将电信号传递给上升舵机,使其引导直升机上升。
同样,接收器接收到下降指令时,会将电信号传递给下降舵机,使其引导直升机下降。
左倾和右倾的控制也是类似的原理。
除了电机和舵机,巨型直升机还可能包括其他的执行机构,如机械臂、抓取器等。
这些执行机构的控制原理一般也是通过接收器接收到相应指令后,通过电路控制执行机构的运动。
总的来说,巨型直升机遥控的原理就是通过遥控器发射无线电波信号,并通过接收器接收和解析信号,然后将信号转化为对应的控制指令,通过控制执行部分控制巨型直升机的各种执行机构,从而实现机械动作。

遥控飞机遥控原理
遥控飞机是一种通过无线电信号控制飞行的模型飞机。
它的遥控原理基于无线电技术。
首先,遥控飞机需要有一个遥控器,也被称为遥控发射器。
这个发射器是由电池供电,并且内置了一个无线电发射装置。
发射器上通常有各种按钮、摇杆或开关,用来控制飞机的各个方面,如升降、左右转向、前进等。
飞机本身也装备了一个接收器,它用于接收发射器发出的无线电信号。
这个接收器通常内置在飞机的电子设备中,如飞行控制器。
接收器将接收到的信号传送给飞行控制器。
飞行控制器是飞机的大脑,它通过接收遥控信号来决定飞机的运动。
飞行控制器根据接收到的信号来控制飞机上的各种执行器,如电机和舵机。
电机负责为飞机提供动力,而舵机则控制飞机的姿态,如升降舵和方向舵的转动。
当飞行员在发射器上操作按钮或摇杆时,发射器将产生相应的无线电信号。
这些信号会通过无线电波的传输,传送到飞机上的接收器。
接收器接收到信号后,会将其转发给飞行控制器。
飞行控制器根据接收到的信号,通过控制电机和舵机的运动来调整飞机的飞行状态。
例如,当飞行员将摇杆向上推时,发射器会发送相应的信号给接收器,接收器将信号传输给飞行控制器,然后飞行控制器会通过控制电机和舵机来使飞机升空。
总结起来,遥控飞机的遥控原理就是通过无线电信号的传输,将飞行员在发射器上的操作转化为飞机的运动和动作。
这种方式使得飞行员可以远距离地控制飞机,实现各种飞行动作和操作。
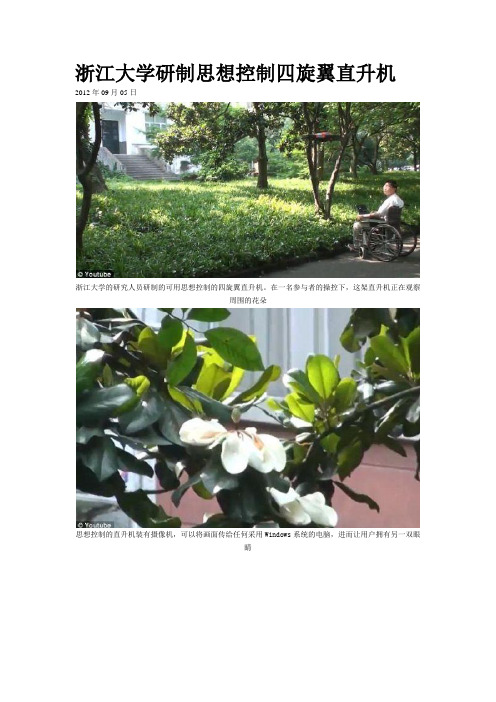
浙江大学研制思想控制四旋翼直升机2012年09月05日浙江大学的研究人员研制的可用思想控制的四旋翼直升机。
在一名参与者的操控下,这架直升机正在观察周围的花朵思想控制的直升机装有摄像机,可以将画面传给任何采用Windows系统的电脑,进而让用户拥有另一双眼睛思想控制直升机向笔记本传回的影像Emotive头盔,售价299美元,可以在网上购买Emotive头盔可以控制四旋翼直升机新浪科技讯北京时间9月5日消息,中国浙江大学的研究人员研制出一款可用思想控制的四旋翼直升机。
这款直升机能够充当残疾人的眼睛,允许他们仔细观察远处的物体。
此外,这款直升机还可以上演有趣的互动游戏——空中摔跤,让残疾人和身体健全的人操控直升机展开较量,从中获得乐趣。
思想控制四旋翼直升机通过Amotive公司研制的可测量脑电活动的Emotiv头盔控制。
Emotiv头盔用于破译大脑活动,零售价299美元,能够与任何采用Windows系统的电脑相连,允许用户通过思想控制应用软件和游戏,例如《愤怒的小鸟》。
Emotiv头盔利用蓝牙技术与笔记本相连,而后将命令传输给四旋翼直升机。
随着时间的推移,这项技术将不断进步,操作也将日益简单并拥有更多功能。
浙江大学的研究小组可能仍需要考虑如何设计不同的命令,控制直升机。
《新科学家》杂志报道称,用户可以思考“右”,让直升机往前飞行;思考“推”,让直升机往上飞;思考“左”,让直升机顺时针飞行;思考“极左”,让直升机从地面上起飞。
咬牙齿和眨眼睛能够产生Emotiv 头盔可以读取的脑信号,命令直升机拍照或者向笔记本传送视频。
用户可以将眨眼4次作为一个命令,命令直升机拍照。
有人认为思想控制的四旋翼直升机可用于在身体健全的人和残疾人之间举行一场比赛,让他们操控直升机展开空中摔跤。
(孝文)科学家研发半机械蟑螂可遥控曲线运动遥控蟑螂:研究人员可用这种小型电路板远程控制这只动物,让它沿着地面上的一个曲线运动,而且精确度很高。
遥控直升机原理
遥控直升机的原理是基于遥控技术和直升机的飞行原理。
遥控直升机主要由遥控器和直升机本体组成。
遥控器是用来通过电磁信号远程控制直升机的设备。
它通常包括一个发射器和一个接收器。
发射器通过控制杆、按钮、开关等输入指令,将指令转换成无线电频率信号发送出去。
接收器接收到无线电信号后,将信号转换成控制信号,通过电线或者无线方式传输给直升机本体。
直升机本体主要由机身、旋翼、尾桨和动力系统组成。
机身负责承载其他部件,旋翼提供升力,尾桨提供平衡和方向控制,动力系统提供动力。
当遥控器发送信号时,接收器将信号转换成电信号,传输给直升机本体。
直升机本体通过接收到的控制信号,控制电机的转速和旋翼的角度,从而调整升力和平衡,实现飞行和操纵。
遥控直升机的飞行原理与普通直升机相同,通过旋翼产生升力,调整旋翼角度来改变飞行方向和高度。
遥控直升机的飞行控制主要通过遥控器发出的信号来调整旋翼角度和电机转速,从而实现飞行和操纵。
总结起来,遥控直升机的原理是通过遥控器发出信号,接收器将信号转换成控制信号传输给直升机本体,直升机本体根据接收到的信号调整旋翼角度和电机转速,从而实现飞行和操纵。
用意念控制的飞机
用大脑意念来操控的东西越來越流行,连玩直升机模型可能都不需要遥控器了,可以由你的大脑意念来控制。
美国的PuzzleBox公司推出一款可以分析大脑想法操作的直升机模型,Puzzlebox Orbit。
Puzzlebox Orbit是由头戴式脑电波探测器、脑机接口软件和遥控器组成。
脑电波探测器将脑部产生的微弱生物电脉冲转换成信号发送给遥控器,遥控器里的微控制器再将其处理为飞行命令发给直升机模型。
这中间自然少不了脑机接口软件的搭桥,Puzzlebox花了3年时间研发,并且开放所有源代码,也就是说控制板上的软件是可以任意扩展的,这样就可以发挥想象让各种东西被“意念”控制起来。
科技前沿图中这个插满了电极的帽子是用来做什么的呢?事实上,它就是用意念操控飞机的关键!它可以读取来自佩戴者大脑的电信号,而后利用专门的图片上这种牙齿上的“纹身”可不是普通的纹身,它不
仅能够做成各种图案成为一种装饰,更重要的是能够嵌入 “牙齿纹身”也能监测身体健康
“神奇帽子”让你用意念操控飞机
“牙齿纹身”由一种高科技石墨烯材料制作
而成。
石墨烯是单层碳原子构成的薄膜,最薄但最坚硬的纳米材料,容易黏着上其他物质。
片传感器可以被轻而易举地镶嵌到牙齿表面上,能够像“尼龙扣”一样轻易地粘取细菌分子。
Lifi:用灯光上网
现在很多人在家上网总是需要依靠WiFi信号,而你敢相信吗,的发展,无需WiFi信号,只要打开一盏LED灯就可以上网。
德国物理学家哈拉尔德·哈斯由灯泡本身“点亮”了奇思妙想:
不用刀也可以切菜的菜板
我们都知道,要想切菜必须要用刀,你想过不用刀就切菜吗?图片上这块黑色的平板,看似砧板,其实是一个高科技的镜面切割台,只要将食材放
贴纸眼镜
不知道戴眼镜的你有没有过这样的困
扰,尽管平时戴自己的眼镜很方便,但游泳
Digitsole智能保暖鞋垫
冬天马上就要到了,小朋友们有没有脚底发凉的问题呢?这双智能保暖鞋垫Digitsole就能以一种更优雅时尚的方式温暖你的双脚。
Digitsole鞋垫看上去就像普通的
鞋垫一样,但当你查看鞋垫底部时,你
到一个US B接口和一个开
这款鞋垫含有加热元件和电池,能。
遥控直升机工作原理遥控直升机是一种操控简便、灵活性高的航空模型,它的工作原理基于几个关键的技术。
本文将详细介绍遥控直升机的工作原理,包括气动力学、电子控制系统以及电动机系统。
一、气动力学遥控直升机的气动力学是实现其飞行的基础。
与固定翼飞机不同,直升机通过辅助旋转翼产生升力和推力。
旋翼通过一个主旋翼和一个尾桨组成,主旋翼用于产生升力和推力,而尾桨则用于保持直升机平衡和操控航向。
主旋翼的叶片通过旋转产生升力。
它们的角度可以根据需要调整,以控制飞行姿态和提供向前或向后的推力。
通过改变旋翼的螺距角度,可以改变升力和推力的大小。
尾桨主要用于平衡直升机并控制其方向。
二、电子控制系统遥控直升机的电子控制系统起着至关重要的作用。
它负责接收飞行员通过遥控器发送的信号,并将其转化为适当的指令来调整旋翼的角度和转速,以控制机身的姿态和移动。
电子控制系统由接收机、传感器和控制器组成。
接收机接收来自遥控器的无线信号,并将其转化为电信号传递给控制器。
传感器用于测量直升机的姿态和运动,例如加速度计、陀螺仪和磁力计等。
控制器根据传感器的数据和接收到的信号,计算出合适的指令,并发送给电动机系统。
三、电动机系统电动机系统是遥控直升机的动力来源。
它通过电能驱动旋翼和尾桨的转动,从而产生升力和推力。
电动机系统由电动机、电调和电池组成。
电动机是转动旋翼和尾桨的核心部件,其转速和扭矩可以根据信号进行调整。
电调是控制电动机转速和功率输出的装置,它可以根据控制器的指令调整电动机的输出。
电池提供电能给电动机和电调,以供其正常运行。
电动机系统在飞行过程中,可以根据遥控器的指令调整旋翼的转速和角度,实现直升机的升降、前进、后退、左转和右转等动作。
结论遥控直升机的工作原理涉及到气动力学、电子控制系统和电动机系统等关键技术。
气动力学是直升机飞行的基础,通过旋翼产生升力和推力。
电子控制系统负责接收遥控器信号,并将其转化为控制指令,调整旋翼角度和转速。
电动机系统提供动力,驱动旋翼和尾桨的转动。