定轴轮系传动比的计算分解
- 格式:ppt
- 大小:2.63 MB
- 文档页数:33
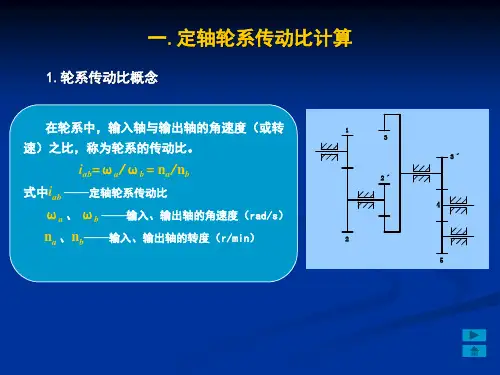

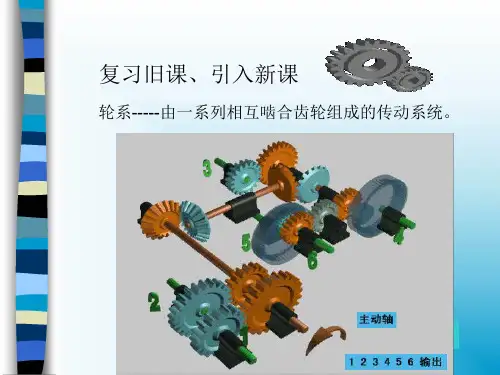
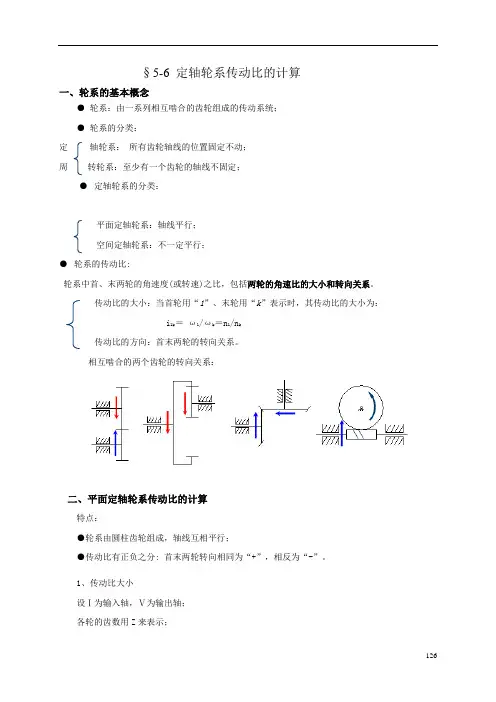
126§5-6 定轴轮系传动比的计算一、轮系的基本概念● 轮系:由一系列相互啮合的齿轮组成的传动系统; ● 轮系的分类: 定轴轮系: 所有齿轮轴线的位置固定不动; 周转轮系:至少有一个齿轮的轴线不固定; ● 定轴轮系的分类:平面定轴轮系:轴线平行; 空间定轴轮系:不一定平行;● 轮系的传动比:轮系中首、末两轮的角速度(或转速)之比,包括两轮的角速比的大小和转向关系。
传动比的大小:当首轮用“1”、末轮用“k ”表示时,其传动比的大小为: i 1k = ω1/ωk =n 1/n k 传动比的方向:首末两轮的转向关系。
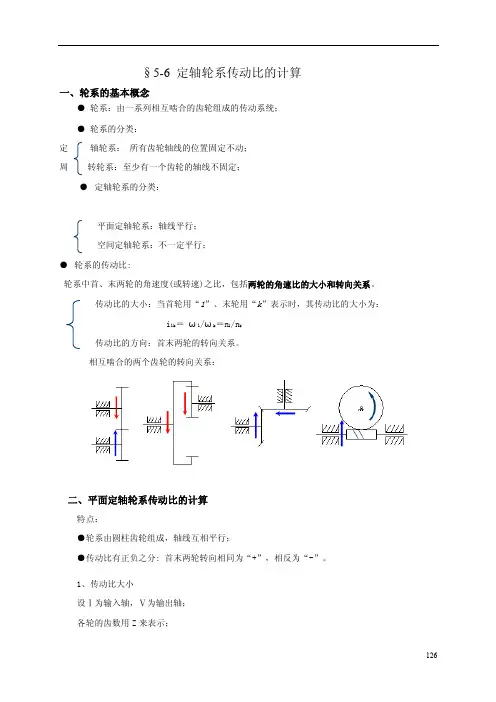
相互啮合的两个齿轮的转向关系:二、平面定轴轮系传动比的计算特点:●轮系由圆柱齿轮组成,轴线互相平行;●传动比有正负之分: 首末两轮转向相同为“+”,相反为“-”。
1、传动比大小设Ⅰ为输入轴,Ⅴ为输出轴; 各轮的齿数用Z 来表示;127角速度用ω表示;首先计算各对齿轮的传动比:所以:结论: 定轴轮系的传动比等于各对齿轮传动比的连乘积,其值等于各对齿轮的从动轮齿数的乘积与主动轮齿数的乘积之比; 2、传动比方向在计算传动比时,应计入传动比的符号: 首末两轮转向相同为“+”,相反为“-”。
(1)公式法式中:m 为外啮合圆柱齿轮的对数 举例:(2)箭头标注法采用直接在图中标注箭头的方法来确定首末两轮的转向,转向相同为“+”,相反为“-”。
举例:122112z z i ==ωω32223332z i z ωωωω'''===33434443z i z ωωωω'''===455445z z i ==ωω11211)1(--==k k m k k z z z z i ωω128三、空间定轴轮系的传动比特点:●轮系中包含有空间齿轮(如锥齿轮、蜗轮蜗杆、螺旋齿轮等); ●首末两轮的轴线不一定平行。
1 传动比的大小2 传动比的方向注意:只能采用箭头标注法,不能采用(-1)m 法判断。
轮系及其传动比计算1.轮系的类型和应用1.1轮系的分类根据轮系运转中各齿轮轴线的空间位置是否固定,可以将轮系分为定轴轮系和周转轮系两种基本类型。
1)定轴轮系:轮系运转时,如果各齿轮轴线的位置都不固定,则称为定轴轮系(或称为普通轮系),可分为平行定轴轮系(各轮轴线相互平行)和空间定轴轮系(各轮轴线不相互平行,含圆锥齿轮、蜗轮蜗杆等)。
2)周转轮系:轮系运转时,至少有一个齿轮轴线的位置不固定,而是绕某一固定轴线回转,则称为周转轮系,其中绕动齿轮称为行星轮,轴线不动的中心轮称为太阳轮。
按自由度数目不同可分为差动轮系和行星轮系。
1.2轮系的功用1)实现相距较远的两轴之间的传动2)实现分路传动3)实现变速变向传动4)实现大速比或大功率传动5)实现运动的合成与分解2.轮系传动比的计算轮系传动比,是指轮系运动时其输入轴与输出轴的角速度或转速之比。
它包括计算传动比的大小和确定输入轴与输出轴两者转向关系两方面内容。
2.1定轴轮系的传动比设A表示输入轴,B表示输出轴,则一般定轴轮系的传动比计算公式为:іAB=ωA/ωB=从A到B所有从动齿轮数连乘积/从A到B所有主动齿轮数连乘积平面定轴轮系和空间定轴轮系的传动比的大小均可用该式计算,但转向的确定有不同的方法。
2.1.1平面定轴轮系中的转向关系可用“+”、“-”号来表示,“+” 号表示转向相同、“-”号表示转向相反。
一对外啮合圆柱齿轮传动两轮的转向相反,其传动比前应加注“-”号;一对内啮合圆柱齿轮传动两轮的转向相同,其传动比前应加注“+”号。
设轮系中有m对外啮合齿轮,则在该式右侧的分式前应加注(-1)m。
若传动比的计算结果为正,则表示输入轴与输出轴的转向相同;若为负,则表示转向相反。
2.1.2空间定轴轮系输入轴与输出轴之间的转向关系不能用上述方法来确定,而必须在机构简图上用画箭头的方法来表示。
1)对于圆锥齿轮传动,表示方向的箭头应该同时指向啮合点即箭头对箭头,或同时背离啮合点即箭尾对箭尾。
§5-6 定轴轮系传动比的计算一、轮系的基本概念●轮系:由一系列相互啮合的齿轮组成的传动系统;●轮系的分类:定轴轮系:所有齿轮轴线的位置固定不动;周转轮系:至少有一个齿轮的轴线不固定;●定轴轮系的分类:平面定轴轮系:轴线平行;空间定轴轮系:不一定平行;●轮系的传动比:轮系中首、末两轮的角速度(或转速)之比,包括两轮的角速比的大小和转向关系。
传动比的大小:当首轮用“1”、末轮用“k”表示时,其传动比的大小为:i1k=ω1/ωk=n1/n k传动比的方向:首末两轮的转向关系。
相互啮合的两个齿轮的转向关系:二、平面定轴轮系传动比的计算特点:●轮系由圆柱齿轮组成,轴线互相平行;●传动比有正负之分: 首末两轮转向相同为“+”,相反为“-”。
1、传动比大小设Ⅰ为输入轴,Ⅴ为输出轴;各轮的齿数用Z来表示;126127角速度用ω表示;首先计算各对齿轮的传动比:所以:结论: 定轴轮系的传动比等于各对齿轮传动比的连乘积,其值等于各对齿轮的从动轮齿数的乘积与主动轮齿数的乘积之比; 2、传动比方向在计算传动比时,应计入传动比的符号: 首末两轮转向相同为“+”,相反为“-”。
(1)公式法式中:m 为外啮合圆柱齿轮的对数 举例:(2)箭头标注法采用直接在图中标注箭头的方法来确定首末两轮的转向,转向相同为“+”,相反为“-”。
举例:122112z z i ==ωω32223332z i z ωωωω'''===33434443z i z ωωωω'''===455445z z i ==ωω11211)1(--==k km k k z z z z i K K ωω三、空间定轴轮系的传动比特点:●轮系中包含有空间齿轮(如锥齿轮、蜗轮蜗杆、螺旋齿轮等);●首末两轮的轴线不一定平行。
1 传动比的大小2 传动比的方向注意:只能采用箭头标注法,不能采用(-1)m法判断。
分两种情况讨论:情况1:首、末两轮轴线平行传动比计算式前应加“+”、“-”号,表示两轮的转向关系。