传递函数模型表述
- 格式:ppt
- 大小:435.00 KB
- 文档页数:23
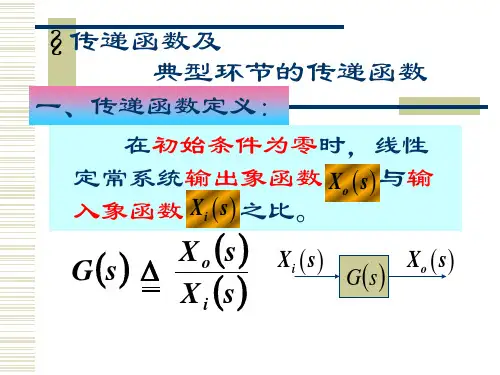
传递函数模型和传递函数传递函数是控制系统中一个重要的概念,它描述了输入信号经过系统后的输出信号与输入信号之间的关系。
传递函数模型是用来描述连续时间系统的,而传递函数是传递函数模型的具体表达式。
传递函数模型可以简化对系统行为的分析和设计。
通过将系统抽象为一个传递函数,可以忽略系统的具体细节,只关注输入输出之间的关系。
这样一来,我们可以用数学方法来分析系统的稳定性、性能等特性。
传递函数模型通常用拉普拉斯变换来表示。
拉普拉斯变换是一种数学变换,用于将连续时间域中的函数转换为复频域中的函数。
通过拉普拉斯变换,可以将微分方程转化为代数方程,从而简化对系统的分析。
传递函数通常表示为H(s),其中s是复变量,表示频域中的频率。
传递函数的形式可以是分数形式,如H(s)=N(s)/D(s),其中N(s)和D(s)分别是多项式。
传递函数的分子多项式N(s)描述了输入信号对系统的影响,而分母多项式D(s)描述了系统的特性。
传递函数的分母多项式D(s)的根决定了系统的稳定性。
如果分母多项式的根都是负实数或者有负实部的复数,那么系统是稳定的。
反之,如果分母多项式的根有正实数或者纯虚数,那么系统是不稳定的。
传递函数还可以用来描述系统的频率响应。
频率响应描述了系统对不同频率输入信号的响应程度。
通过传递函数,可以计算出系统在不同频率下的增益和相位差。
传递函数模型和传递函数在控制系统的分析和设计中起着重要的作用。
通过传递函数模型,可以对系统进行数学建模和分析。
而通过传递函数,可以计算系统的稳定性、频率响应等特性。
掌握传递函数模型和传递函数的使用方法,对于控制系统的工程师来说是非常重要的。
总之,传递函数模型和传递函数是控制系统分析和设计中常用的工具。
通过传递函数模型,可以对系统进行简化和抽象,忽略系统的具体细节。
而通过传递函数,可以计算系统的稳定性、频率响应等特性。
掌握传递函数模型和传递函数的使用方法,可以帮助我们更好地了解和设计控制系统。
arx模型和传递函数ARX模型和传递函数是两种常用于建模和系统分析的数学工具。
本文将对ARX模型和传递函数进行详细介绍,并探讨它们在各个领域的应用。
首先,我们来介绍ARX模型。
ARX模型(AutoRegressive with eXternal input)是一种线性离散时间动态系统模型,用于描述一个系统的输入和输出之间的动态关系。
ARX模型的形式是:y(t) = a1 * y(t-1) + a2 * y(t-2) + … + an * y(t-n) + b1 * u(t-1) + b2 * u(t-2) + … + bm * u(t-m)其中,y(t)是系统的输出变量,u(t)是系统的输入变量,a1,a2, ..., an是AR系数,b1, b2, ..., bm是X系数。
ARX模型的特点是输入和输出的时间延迟关系可以通过相关系数来表示,这样就可以通过已知的输入和输出序列来推导模型参数。
ARX模型在控制系统、信号处理、经济学和金融学等领域都有广泛的应用。
在控制系统中,ARX模型可以用于建立系统的数学模型,并用于控制器设计和系统性能评估。
在信号处理中,ARX模型可以用于信号滤波和预测。
在经济学和金融学中,ARX模型可以用于经济和金融时间序列的建模和预测。
接下来,我们来介绍传递函数。
传递函数是一种将系统的输入转换成输出的数学函数,用于描述一个线性时不变系统的动态行为。
传递函数的形式是:G(s)=Y(s)/U(s)其中,G(s)是系统的传递函数,Y(s)是系统的输出的Laplace变换,U(s)是系统的输入的Laplace变换。
传递函数的特点是可以通过频率响应来描述系统的幅频和相频特性。
传递函数在控制系统中有广泛的应用。
在控制系统设计中,传递函数可以用于建立系统的数学模型,并用于控制器设计和系统性能评估。
传递函数还可以用于分析系统的稳定性和频率响应。
此外,传递函数还可以用于设计滤波器和信号处理算法。
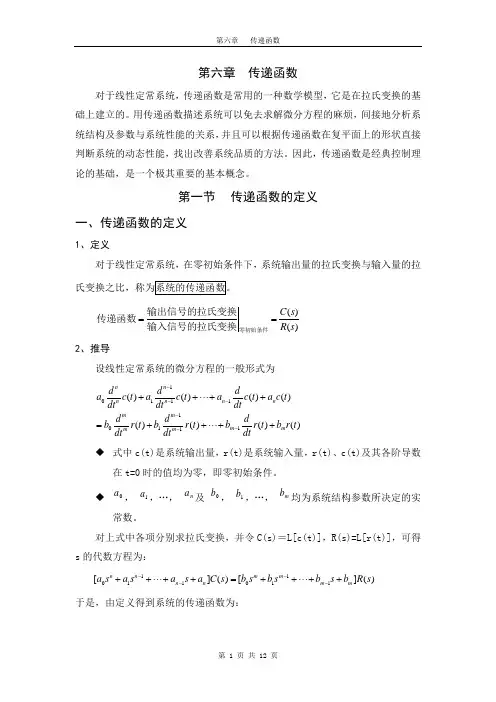
第六章 传递函数对于线性定常系统,传递函数是常用的一种数学模型,它是在拉氏变换的基础上建立的。
用传递函数描述系统可以免去求解微分方程的麻烦,间接地分析系统结构及参数与系统性能的关系,并且可以根据传递函数在复平面上的形状直接判断系统的动态性能,找出改善系统品质的方法。
因此,传递函数是经典控制理论的基础,是一个极其重要的基本概念。
第一节 传递函数的定义一、传递函数的定义1、定义对于线性定常系统,在零初始条件下,系统输出量的拉氏变换与输入量的拉()()C s R s ==零初始条件输出信号的拉氏变换传递函数输入信号的拉氏变换2、推导设线性定常系统的微分方程的一般形式为1011110111()()()()()()()()n n n n nn m m m m mm d d d a c t a c t a c t a c t dtdtdtd d d b r t b r t b r t b r t dtdtdt------++⋅⋅⋅++=++⋅⋅⋅++◆ 式中c(t)是系统输出量,r(t)是系统输入量,r(t)、c(t)及其各阶导数在t=0时的值均为零,即零初始条件。
◆a , 1a ,…,na 及b , 1b ,…,mb 均为系统结构参数所决定的实常数。
对上式中各项分别求拉氏变换,并令C(s)=L[c(t)],R(s)=L[r(t)],可得s 的代数方程为:11011011[]()[]()nn mm n n m m a s a sa s a C sb sb sb s b R s ----++⋅⋅⋅++=++⋅⋅⋅++于是,由定义得到系统的传递函数为:10111011()()()()()m m m m nn n nb s b sb s b C s M s G s R s a s a sa s a N s ----++⋅⋅⋅++===++⋅⋅⋅++其中,1011()m m m m M s b s b s b s b --=++⋅⋅⋅++ 1011()n n n n N s a s a s a s a --=++⋅⋅⋅++ N(s)=0称为系统的特征方程,其根称为系统特征根。
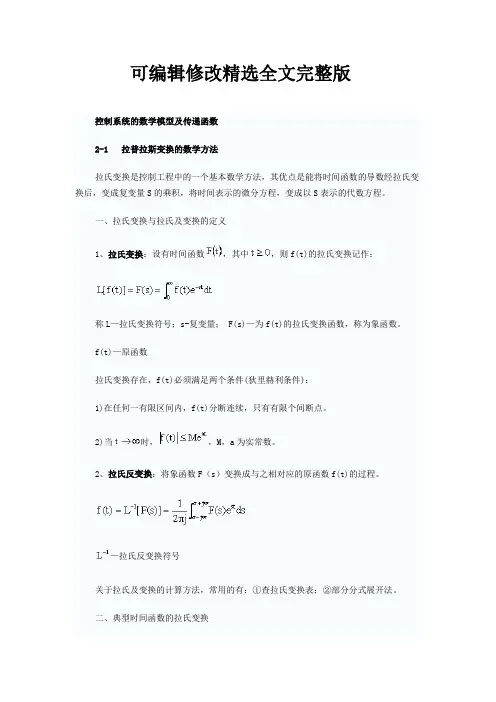
可编辑修改精选全文完整版控制系统的数学模型及传递函数2-1 拉普拉斯变换的数学方法拉氏变换是控制工程中的一个基本数学方法,其优点是能将时间函数的导数经拉氏变换后,变成复变量S的乘积,将时间表示的微分方程,变成以S表示的代数方程。
一、拉氏变换与拉氏及变换的定义1、拉氏变换:设有时间函数,其中,则f(t)的拉氏变换记作:称L—拉氏变换符号;s-复变量; F(s)—为f(t)的拉氏变换函数,称为象函数。
f(t)—原函数拉氏变换存在,f(t)必须满足两个条件(狄里赫利条件):1)在任何一有限区间内,f(t)分断连续,只有有限个间断点。
2)当时,,M,a为实常数。
2、拉氏反变换:将象函数F(s)变换成与之相对应的原函数f(t)的过程。
—拉氏反变换符号关于拉氏及变换的计算方法,常用的有:①查拉氏变换表;②部分分式展开法。
二、典型时间函数的拉氏变换在实际中,对系统进行分析所需的输入信号常可化简成一个成几个简单的信号,这些信号可用一些典型时间函数来表示,本节要介绍一些典型函数的拉氏变换。
1.单位阶跃函数2.单位脉冲函数3.单位斜坡函数4.指数函数5.正弦函数sinwt由欧拉公式:所以,6.余弦函数coswt其它的可见表2-1:拉氏变换对照表F(s) f(t)11(t)t三、拉氏变换的性质1、线性性质若有常数k1,k2,函数f1(t),f2(t),且f1(t),f2(t)的拉氏变换为F1(s),F2(s),则有:,此式可由定义证明。
2、位移定理(1)实数域的位移定理若f(t)的拉氏变换为F(s),则对任一正实数a有, 其中,当t<0时,f(t)=0,f(t-a)表f(t)延迟时间a. 证明:,令t-a=τ,则有上式=例:, 求其拉氏变换(2)复数域的位移定理若f(t)的拉氏变换为F(s),对于任一常数a,有证:例:求的拉氏变换3、微分定理设f(t)的拉氏变换为F(s),则其中f(0+)由正向使的f(t)值。
传递函数的标准形式传递函数是描述线性时不变系统的输入和输出之间关系的数学工具,它在控制系统工程中有着重要的应用。
传递函数的标准形式是指将传递函数表示为分子多项式与分母多项式的比值形式,通常用来描述线性时不变系统的动态特性。
在掌握传递函数的标准形式后,我们可以更好地分析和设计控制系统,因此对于控制工程师来说,了解传递函数的标准形式是非常重要的。
传递函数的标准形式通常表示为:G(s) = N(s) / D(s)。
其中,G(s)为传递函数,N(s)为分子多项式,D(s)为分母多项式,s为复变量。
分子多项式和分母多项式的次数可以通过对系统的动态特性进行分析得到,而传递函数的标准形式则可以帮助我们更好地理解系统的动态特性。
在实际应用中,传递函数的标准形式可以通过系统的微分方程或者状态方程来得到。
通过对系统进行拉普拉斯变换,我们可以得到系统的传递函数,并将其表示为标准形式。
这样做的好处是可以方便地进行传递函数的分析和设计,比如进行稳定性分析、频域分析、以及控制器设计等。
对于控制系统工程师来说,掌握传递函数的标准形式可以帮助我们更好地理解系统的动态特性,从而更好地设计控制器以实现系统的稳定性、快速响应、抑制干扰等性能指标。
而在实际工程中,我们经常会遇到一些复杂的系统,这时候掌握传递函数的标准形式就显得尤为重要。
在控制系统工程中,我们经常会遇到一些复杂的系统,比如高阶系统、多输入多输出系统等。
对于这些系统,我们可以通过传递函数的标准形式来进行分析和设计,从而更好地理解系统的动态特性,实现系统的稳定性和性能指标。
总之,传递函数的标准形式是控制系统工程中非常重要的概念,它可以帮助我们更好地理解系统的动态特性,从而更好地设计控制器以实现系统的稳定性、快速响应、抑制干扰等性能指标。
掌握传递函数的标准形式对于控制系统工程师来说是非常重要的,希望大家能够加强对这一概念的学习和理解。
典型函数的传递函数是指描述系统输入与输出之间关系的函数。
在控制系统中,传递函数通常用于描述线性时不变系统的动态行为。
传递函数可以是连续时间的,也可以是离散时间的。
传递函数的一般形式为:G(s) = Y(s)/X(s),其中G(s)是传递函数,Y(s)是输出信号的拉普拉斯变换,X(s)是输入信号的拉普拉斯变换。
传递函数描述了系统对输入信号的响应方式。
对于典型函数,其传递函数的形式会根据具体的系统类型和结构而有所不同。
以下是一些常见的典型函数及其传递函数的示例:
1. 比例环节(Proportional element):传递函数为K,其中K 是比例系数。
输出与输入成正比关系。
2. 积分环节(Integral element):传递函数为1/s,其中s 是复变量。
输出是输入的积分。
3. 微分环节(Derivative element):传递函数为s,输出是输入的微分。
4. 一阶惯性环节(First-order inertial element):传递函数为K/(Ts+1),其中T 是时间常数。
该环节具有一阶滞后特性。
5. 二阶振荡环节(Second-order oscillating element):传递函数为K/(s^2+2ζωs+ω^2),其中ζ是阻尼比,ω是自然频率。
该环节具有二阶振荡特性。
以上仅是一些常见的典型函数及其传递函数的示例,实际上还有很多其他类型的典型函数和传递函数形式。
在实际应用中,根据具体的系统要求和特点选择合适的典型函数和传递函数进行建模和分析。