控制系统的传递函数模型
- 格式:ppt
- 大小:526.50 KB
- 文档页数:32
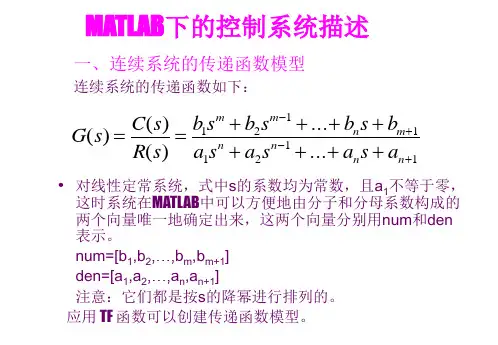
《自动控制原理》MATLAB中的传递函数模型实验一、实验目的1、熟练运用matlab软件,求解控制系统数学模型2、掌握传递函数在matlab中的表达方法3、掌握matlab求解拉氏变换和反变换4、掌握matlab求系统极值点和零点判断系统稳定性二、实验仪器Matlab2014b版三、实验原理(一)MATLAB中的传递函数模型传递函数在matlab中的表达方法控制系统的传递函数模型为:在MATLAB中,分子/分母多项式通过其系数行向量表示,即:num = [b0 b1 … bm]den = [a0 a1 … an]此时,系统的传递函数模型用tf函数生成,句法为:sys=tf(num, den) 其中,sys为系统传递函数。
如:num = [1 5 0 2]; den = [2 3 15 8];则:sys=tf(num, den)输出为:Transfer function:若控制系统的模型形式为零极点增益形式:此时,系统的传递函数模型用zpk函数生成,句法为:sys=zpk(z, p, k)。
zpk函数也可用于将传递函数模型转换为零极点增益形式,句法为:zpksys=zpk(sys)如:z=[-0.5 -1 -3]; p=[1 -2 -1.5 -5]; k=10;sys=zpk(z, p, k)传递函数的转换[num,den]=zp2tf(z,p,k)[z,p,k]=tf2zp(num,den)实际系统往往由多个环节通过串联、并联及反馈方式互连构成。
MATLAB提供的三个用于计算串联、并联及反馈连接形成的新系统模型的函数。
series函数计算两子系统串联后的新系统模型。
句法:sys = series(sys1, sys2)sys1, sys2分别为两子系统模型parallel函数计算两子系统并联后的新系统模型。
句法: sys = parallel(sys1, sys2)feedback函数计算两子系统反馈互联后的新系统模型。
可编辑修改精选全文完整版控制系统的数学模型及传递函数2-1 拉普拉斯变换的数学方法拉氏变换是控制工程中的一个基本数学方法,其优点是能将时间函数的导数经拉氏变换后,变成复变量S的乘积,将时间表示的微分方程,变成以S表示的代数方程。
一、拉氏变换与拉氏及变换的定义1、拉氏变换:设有时间函数,其中,则f(t)的拉氏变换记作:称L—拉氏变换符号;s-复变量; F(s)—为f(t)的拉氏变换函数,称为象函数。
f(t)—原函数拉氏变换存在,f(t)必须满足两个条件(狄里赫利条件):1)在任何一有限区间内,f(t)分断连续,只有有限个间断点。
2)当时,,M,a为实常数。
2、拉氏反变换:将象函数F(s)变换成与之相对应的原函数f(t)的过程。
—拉氏反变换符号关于拉氏及变换的计算方法,常用的有:①查拉氏变换表;②部分分式展开法。
二、典型时间函数的拉氏变换在实际中,对系统进行分析所需的输入信号常可化简成一个成几个简单的信号,这些信号可用一些典型时间函数来表示,本节要介绍一些典型函数的拉氏变换。
1.单位阶跃函数2.单位脉冲函数3.单位斜坡函数4.指数函数5.正弦函数sinwt由欧拉公式:所以,6.余弦函数coswt其它的可见表2-1:拉氏变换对照表F(s) f(t)11(t)t三、拉氏变换的性质1、线性性质若有常数k1,k2,函数f1(t),f2(t),且f1(t),f2(t)的拉氏变换为F1(s),F2(s),则有:,此式可由定义证明。
2、位移定理(1)实数域的位移定理若f(t)的拉氏变换为F(s),则对任一正实数a有, 其中,当t<0时,f(t)=0,f(t-a)表f(t)延迟时间a. 证明:,令t-a=τ,则有上式=例:, 求其拉氏变换(2)复数域的位移定理若f(t)的拉氏变换为F(s),对于任一常数a,有证:例:求的拉氏变换3、微分定理设f(t)的拉氏变换为F(s),则其中f(0+)由正向使的f(t)值。
直流伺服控制系统的数学模型
直流伺服控制系统的数学模型可以描述为一个单输入单输出的控制系统,其中输出信号为电机角位置或角速度,输入信号为电机的电压。
系统的基本元素为直流电机,功率放大器,编码器和反馈环路。
系统的传递函数可以表示为:
G(s) = \frac{K}{s(JLs + bJ + K^2)}
其中,K为电机增益系数,J为电机惯性矩,L为电机电感,b为电机摩擦系数,K为电机电动势常数。
将输入信号表示为U(s),输出信号表示为\theta(s),则系统的闭环传递函数可以表示为:
\frac{\theta(s)}{U(s)} = \frac{K}{s^2(JLs + bJ + K^2) + K^2}
为了使系统稳定,需要设计合适的控制器增益。
常用的控制方法包括PID控制、模型预测控制等。
总之,直流伺服控制系统的数学模型可以用传递函数表示,通过设计合适的控制器增益实现稳定的控制。
第十章基于传递函数模型的控制系统设计第十章主要介绍了基于传递函数模型的控制系统设计。
传递函数模型是一种常用的用于描述动态系统的数学模型,通过建立传递函数模型可以对系统的动态特性进行分析和设计相应的控制器。
在控制系统设计中,首先需要对待控制的系统进行建模。
利用传递函数模型可以方便地描述系统的输入、输出之间的关系。
传递函数模型可以通过系统的输入-输出关系,即系统的微分方程得到。
一般来说,传递函数模型可以通过使用Laplace变换来表示。
在进行控制系统设计时,首先需要确定系统的性能要求。
性能指标通常包括稳定性、快速性、鲁棒性等。
在基于传递函数模型的控制系统设计中,一般使用PID控制器来实现对系统的控制。
PID控制器包括比例项、积分项和微分项,通过调节这三个部分的参数可以实现对系统的控制。
在进行控制器参数的设计时,可以通过频域分析或者时域分析的方法对系统进行分析。
在频域分析中,可以通过绘制系统的Bode图来分析系统的频率响应,从而设计合适的PID参数。
在时域分析中,可以通过绘制系统的阶跃响应或者脉冲响应来分析系统的动态特性,从而设计合适的PID参数。
在控制系统参数设计完成后,需要进行控制器的调整和优化。
控制器的调整和优化可以通过试错法、根轨迹法、频率响应法等方法来实现。
这些方法可以通过不断地调整和优化控制器参数来实现对系统的最佳控制效果。
在进行控制系统设计时,还需要考虑控制器的实现。
控制器的实现通常是通过安装在数字控制器或者嵌入式控制器上运行的算法来实现的。
通过合适的控制算法和硬件系统,可以实现对系统的准确控制。
在进行基于传递函数模型的控制系统设计时,还需要进行系统的分析和仿真。
通过对控制系统进行仿真可以方便地分析系统的动态特性和控制效果,从而对控制器参数和设计方案进行验证和优化。
综上所述,基于传递函数模型的控制系统设计是一种常用的控制系统设计方法。
通过传递函数模型可以方便地对系统进行建模和分析,通过PID控制器可以实现对系统的控制。
控制系统中的传递函数分析传递函数是控制系统中的重要概念,用于描述输入信号与输出信号之间的关系。
通过对传递函数的分析,我们可以深入了解控制系统的性能和稳定性。
本文将对控制系统中的传递函数进行详细分析与讨论。
一、传递函数的定义及表示在控制系统中,传递函数是描述输入信号与输出信号之间关系的数学模型。
通常由拉普拉斯变换表示,可以表示为以下形式:G(s) = Y(s) / X(s)其中,G(s)为传递函数,Y(s)为输出信号的拉普拉斯变换,X(s)为输入信号的拉普拉斯变换。
二、传递函数的性质传递函数具有以下几个重要的性质:1. 线性性质:传递函数具有线性特性,即满足叠加原理,对于两个输入信号分别为X1(s)和X2(s),输出信号分别为Y1(s)和Y2(s),则对应的传递函数分别为G1(s)和G2(s),则有:G(a*X1(s) + b*X2(s)) = a*G1(s) + b*G2(s)其中,a和b为常数。
2. 时不变性:传递函数具有时不变性,即传递函数对于输入信号的响应不随时间变化而变化。
3. 因果性:传递函数具有因果性,即输入信号的响应只依赖于当前及过去的输入信号,而不依赖于未来的输入信号。
4. 稳定性:传递函数的稳定性可以通过判断系统的极点位置来确定。
当所有极点的实部均为负数时,传递函数是稳定的。
三、传递函数的频域分析传递函数可以通过频域分析进行研究和理解。
1. 幅频特性:通过传递函数的模来描述系统的幅频特性。
传递函数的模为:|G(s)| = sqrt((Re(G(s)))^2 + (Im(G(s)))^2)其中,Re(G(s))为传递函数的实部,Im(G(s))为传递函数的虚部。
幅频特性可以反映系统对不同频率信号的增益情况。
2. 相频特性:通过传递函数的相位角来描述系统的相频特性。
传递函数的相位角为:arg(G(s)) = atan(Im(G(s)) / Re(G(s)))相频特性可以反映系统对不同频率信号的相位变化情况。
控制系统传递函数控制系统是现代工程中广泛应用的重要技术之一,用于实现对各种工业过程和设备的自动控制。
而控制系统的核心是其传递函数,它能够描述输入和输出信号之间的关系。
本文将介绍控制系统传递函数的概念、用途以及一些常见的传递函数模型。
一、传递函数的定义与概念传递函数是用于描述控制系统输入和输出之间的关系的数学模型。
它是一个比较抽象的概念,通常用符号G(s)来表示。
其中,s是复变量,表示拉普拉斯变换的变量。
传递函数将输入信号X(s)转换为输出信号Y(s),通过设定传递函数来实现所需的控制效果。
传递函数一般可以写成如下形式:G(s) = Y(s) / X(s)其中,Y(s)是输出信号的拉普拉斯变换,X(s)是输入信号的拉普拉斯变换。
二、传递函数的用途传递函数在控制系统中起到了至关重要的作用。
它可以帮助工程师们分析和设计控制系统,理解系统的性能和行为。
1. 稳定性分析:传递函数能够帮助评估系统的稳定性。
通过分析传递函数的特征值或频率响应,可以判断系统是否稳定。
这对于控制系统的设计和优化非常重要。
2. 系统响应:传递函数可以描述系统对各种输入信号的响应特性。
通过分析传递函数的阶数、根的位置等信息,可以了解系统的响应速度、稳态误差和阻尼情况等。
3. 控制设计:传递函数可以用于控制器的设计。
通过选择合适的传递函数,可以实现对系统的精确控制,满足工程要求。
三、常见的传递函数模型控制系统传递函数可以采用不同的模型形式来描述不同的系统特性。
下面介绍几种常见的传递函数模型。
1. 一阶系统传递函数:G(s) = K / (Ts + 1)其中,K是传递函数的增益,T是一个时间常数。
这种传递函数常用于描述惯性系统,具有较简单的数学形式。
2. 二阶系统传递函数:G(s) = K / (τ^2s^2 + 2ζτs + 1)其中,K是传递函数的增益,τ是一个时间常数,ζ是阻尼系数。
这种传递函数用于描述振荡系统,可以较好地模拟实际工程中的许多系统。