线性离散系统
- 格式:ppt
- 大小:3.79 MB
- 文档页数:89

线性离散系统数学模型和分析方法目录一、内容简述 (3)二、线性离散系统的数学模型 (3)2.1 离散系统的概念 (5)2.2 离散系统的描述方法 (6)2.2.1 差分方程 (7)2.2.2 马尔可夫过程 (8)2.2.3 状态空间表示 (10)2.3 线性离散系统的特性 (11)2.3.1 稳定性分析 (12)2.3.2 脉冲响应与收敛性 (13)2.3.3 系统性能评估 (14)三、分析方法 (16)3.1 拉普拉斯变换法 (17)3.1.1 基本概念 (19)3.1.2 应用分析 (20)3.1.3 收敛性与应用局限 (21)3.2 状态空间方法 (23)3.2.1 基本理论 (24)3.2.2 控制器设计 (25)3.2.3 参数估计 (26)3.3 Z变换法 (27)3.3.1 基本原理 (28)3.3.2 系统分析 (30)3.3.3 系统的性能评估 (31)3.4 时域分析方法 (33)3.4.1 序贯逼近法 (34)3.4.2 数值仿真 (34)3.4.3 基于数字模型的算法 (36)四、应用实例 (37)4.1 控制系统设计 (39)4.1.1 系统建模 (40)4.1.2 控制器设计与仿真 (42)4.2 信号处理 (43)4.2.1 离散信号处理 (45)4.2.2 滤波器设计 (46)4.3 通信系统 (47)4.3.1 调制与解调 (49)4.3.2 语音编码与加密 (51)五、结论与展望 (52)5.1 研究成果总结 (53)5.2 未来研究方向 (54)5.3 实际应用前景 (55)一、内容简述本文档旨在全面介绍线性离散系统数学模型的构建及其分析方法。
线性离散系统在现代科技、工程和经济学等领域具有广泛的应用,因此对其数学模型的理解和分析显得尤为重要。
我们将从线性离散系统的基本概念出发,详细阐述线性离散系统的定义、特点以及类型。
通过实例演示如何建立线性离散系统的数学模型,包括状态方程、传递函数等基本形式。
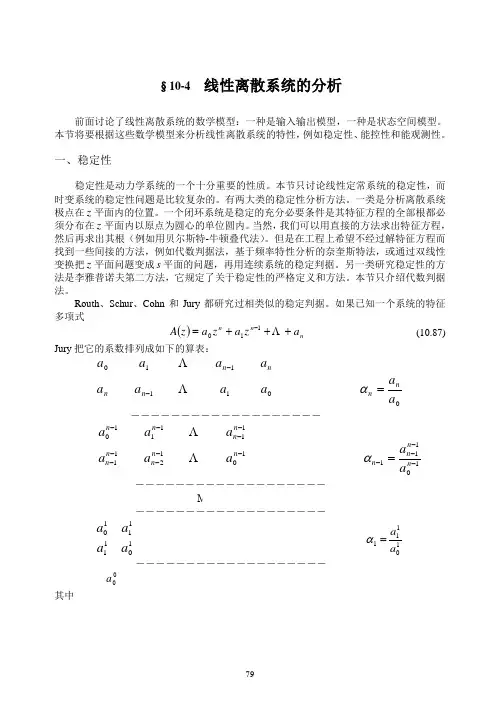
§10-4 线性离散系统的分析前面讨论了线性离散系统的数学模型:一种是输入输出模型,一种是状态空间模型。
本节将要根据这些数学模型来分析线性离散系统的特性,例如稳定性、能控性和能观测性。
一、稳定性稳定性是动力学系统的一个十分重要的性质。
本节只讨论线性定常系统的稳定性,而时变系统的稳定性问题是比较复杂的。
有两大类的稳定性分析方法。
一类是分析离散系统极点在z 平面内的位置。
一个闭环系统是稳定的充分必要条件是其特征方程的全部根都必须分布在z 平面内以原点为圆心的单位圆内。
当然,我们可以用直接的方法求出特征方程,然后再求出其根(例如用贝尔斯特-牛顿叠代法)。
但是在工程上希望不经过解特征方程而找到一些间接的方法,例如代数判据法,基于频率特性分析的奈奎斯特法,或通过双线性变换把z 平面问题变成s 平面的问题,再用连续系统的稳定判据。
另一类研究稳定性的方法是李雅普诺夫第二方法,它规定了关于稳定性的严格定义和方法。
本节只介绍代数判据法。
Routh 、Schur 、Cohn 和Jury 都研究过相类似的稳定判据。
如果已知一个系统的特征多项式()n n na za z a z A +++=- 110 (10.87)Jury 把它的系数排列成如下的算表:11110a a a a a a a a a a nn n nn n =--α―――――――――――――――――――10111101211111110-------------=n n n n n n n n n n n n n a a aaaa a a α――――――――――――――――――――――――――――――――――――――10111110a a a a 10111a a =α―――――――――――――――――――0a 其中kk i k kik k k i k i a a a a a a 01=-=--α表中第一行和第二行分别是(10.87)中的系数按正序和倒序排列的。

线性离散控制系统的稳定性分析在控制工程中,稳定性是占据重要地位的概念之一。
对于线性离散控制系统而言,稳定性分析显得尤为关键。
在本文中,我们将讨论线性离散控制系统的稳定性分析。
线性离散控制系统由两个部分组成,一个是系统本身,另一个是控制器。
这两个部分共同作用,以使系统能够正常运行,达到预定的控制目标。
而稳定性则是在这一过程中,确保系统在特定的条件下能够保持稳定。
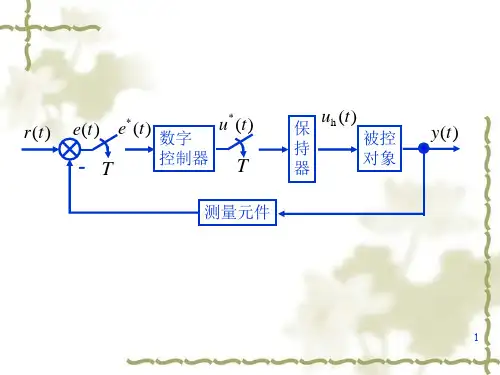
线性离散控制系统一般是在时刻 t 时,通过一个输入信号 u(t) 来控制输出信号 y(t)。
由此可以得到系统的状态空间方程式:x(t+1) = Ax(t) + Bu(t)y(t) = Cx(t)其中,x(t) 是状态向量,它包含系统中所有的状态信息。
A 和B 是状态转移矩阵,用于描述状态向量在时间上的演变。
C 则是输出端的转移矩阵,用于描述系统输出与状态向量之间的关系。
而 u(t) 则是控制器的输入信号,通过控制器的处理,最终得到系统的输出 y(t)。
对于任意给定的系统,其稳定性是需要依据系统本身的特性来分析的。
这里我们将从两个方面来讨论线性离散控制系统的稳定性分析。
分别为:利用特征值和易于分析的特殊情况。
一、利用特征值进行稳定性分析通过特征值,可以很方便地判断一个系统是否稳定。
特征值的计算公式如下:det(A-λI) = 0其中,det() 是矩阵的行列式,A 是状态转移矩阵,λ 是特征值,I 是单位矩阵。
特征值通常是由状态转移矩阵的特征多项式所产生的根。
如果计算出来的特征值都处于单位圆内,那么这个系统就是稳定的。
反之,如果特征值的模超过了 1,则这个系统就是不稳定的。
此外,还存在一种特殊情况,即状态转移矩阵的特征值都是实数。
在这种情况下,我们只需要检测特征值是否位于区间 [-1,1] 中即可。
如果全部都满足此条件,那么系统就是稳定的。
二、特殊情况下的稳定性分析对于线性离散控制系统而言,有一些特殊情况下可以使用更为简便的方法来进行稳定性分析。