简支梁。 根据原超静定梁A端横截面转角θA=0这一变形条件, 即可进而建立补 充方程以求解MeA。 建议读者按此自行算出全部结果。 以上解题的方法步骤也适用于解二次超静定梁。 此时可建立两个变形几何方程, 因而补充方程也就有两个。 这样, 解多余约束力时就需解二元一次联立方程组。 对于三次以上的超静定梁若仍用上述方法求解, 则将不够简便, 此时就宜采用其 他方法。
但弹性模量E值则是比较接近的。 2.调整跨度 梁的转角和挠度与梁的跨度的n次方成正比, 跨度减小时, 转角和挠度就会有更 大程度的减小。 例如均布载荷作用下的简支梁, 其最大挠度与跨度的四次方成 正比, 当其跨度减小为原跨度的1/2时, 则最大挠度将减小为原挠度的1/16。 故减小跨度是提高梁的刚度的一种有效措施。 在有些情况下, 可以增设梁的中 间支座, 以减小梁的跨度, 从而可显著地减小梁的挠度。 但这样就使梁成为超 静定梁。 图10-10a、 b分别画出了均布载荷作用下的简支梁与三支点的超静 定梁的挠曲线大致形状, 可以看出后者的挠度远较前者为小。 在有可能时, 还 可将简支梁改为两端外伸的梁。 这样, 既减小了跨度, 而且外伸端的自重与两 支座间向下的载荷将分别使轴线上每一点产生相反方向的挠度(图10-11a、 b), 从而相互抵消一部分。 这也就提高了梁的刚度。 例如桥式起重机的桁架钢梁 就常采用这种结构形式(图10-11c), 以达到上述效果。
下述关系
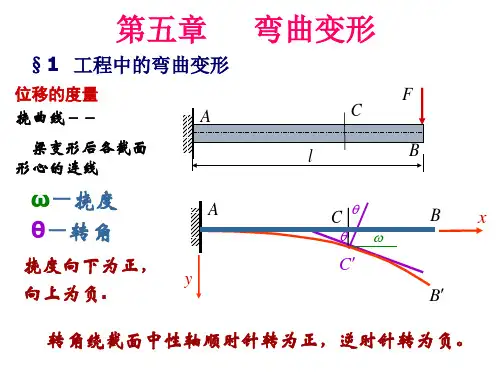
因为挠曲线为一平坦的曲线, θ值很小, 故有 tanθ≈θ(c) 由式(b)、式(c)两式可见, 梁横截面的转角应为
式(d)表明转角θ可以足够精确地从挠曲线方程(a)对x求一次导数得到。 它表 示梁横截面位置的x与该截面的转角θ之间的关系, 通常称为转角方程。 在图10-2所示的坐标系统中, 挠度w以向上为正, 向下为负; 转角θ则以逆时针 转向为正, 顺时针转向为负。