BP神经网络设计
- 格式:pptx
- 大小:1.00 MB
- 文档页数:44
基于BP神经网络的PID控制系统设计一、引言PID(Proportional-Integral-Derivative)控制器是一种常用的自动控制器,其通过测量系统的输出偏差,根据比例、积分和微分三个因素来控制系统的输出。
然而,传统的PID控制器难以适应复杂、非线性和时变的系统,对于这类系统的控制,神经网络已经被证明是一种有效的方法。
本文将介绍基于BP神经网络的PID控制系统设计。
二、BP神经网络简介BP神经网络(Backpropagation Neural Network)是一种常用的前向反馈型人工神经网络,其通过反向传播算法来训练网络参数,从而实现对输入数据的学习和预测。
BP神经网络拥有多层神经元,每个神经元都与下一层神经元相连,并通过权重和阈值来传递和处理输入信息。
三、PID控制器简介PID控制器由比例(Proportional)、积分(Integral)和微分(Derivative)三个部分组成,其控制输出的公式为:u(t) = Kp * e(t) + Ki * ∑e(t)dt + Kd * de(t)/dt其中,u(t)为控制器的输出,Kp、Ki、Kd为控制器的三个参数,e(t)为系统的输出偏差,∑e(t)dt为偏差的积分项,de(t)/dt为偏差的微分项。
1.数据采集和预处理:首先需要采集系统的输入和输出数据,并对其进行预处理,包括数据归一化和滤波处理等。
2.神经网络设计和训练:根据系统的输入和输出数据,设计BP神经网络的结构,并使用反向传播算法来训练网络参数。
在训练过程中,根据系统的输出偏差来调整比例、积分和微分三个参数。
3.PID控制器实现:根据训练得到的神经网络参数,实现PID控制器的功能。
在每个控制周期内,根据系统的输出偏差来计算PID控制器的输出,将其作为控制信号发送给被控制系统。
4.参数调优和性能评估:根据控制系统的实际情况,对PID控制器的参数进行调优,以提高系统的控制性能。
Bp神经网络的仿真设计在当今的科技领域,神经网络技术的发展日新月异,其中 Bp 神经网络更是备受关注。
Bp 神经网络作为一种广泛应用的机器学习模型,在模式识别、预测分析、数据分类等众多领域都展现出了出色的性能。
接下来,让我们深入探讨一下 Bp 神经网络的仿真设计。
Bp 神经网络的基本结构包括输入层、隐藏层和输出层。
输入层接收外部的数据输入,隐藏层则对这些输入进行复杂的计算和处理,输出层最终产生网络的输出结果。
在设计 Bp 神经网络时,首先需要确定网络的层数和各层的神经元数量。
这一决策并非随意而为,而是要根据具体的问题和数据特点来进行考量。
对于输入层神经元的数量,通常取决于输入数据的特征数量。
例如,如果我们要处理图像数据,输入层神经元的数量可能会与图像的像素数量相关;而如果是处理文本数据,则可能与词汇的数量或者特征向量的维度有关。
隐藏层的层数和神经元数量的确定则相对复杂一些。
一般来说,如果问题较为简单,一层隐藏层可能就足够;但对于复杂的问题,可能需要多层隐藏层来提取更高级的特征。
神经元数量的选择往往需要通过试验和经验来确定。
过多的神经元可能导致过拟合,即模型在训练数据上表现出色,但在新的、未见过的数据上性能不佳;而过少的神经元则可能导致欠拟合,无法充分学习数据中的模式。
在Bp 神经网络的仿真设计中,数据的预处理也是至关重要的一步。
原始数据往往存在噪声、缺失值或者数据范围差异较大等问题。
为了提高网络的学习效果和性能,需要对数据进行清洗、归一化等处理。
数据清洗可以去除噪声和异常值,保证数据的质量。
归一化则将数据的取值范围限制在一个较小的区间内,例如 0, 1 或者-1, 1,这样可以加快网络的训练速度,并且有助于提高模型的稳定性和泛化能力。
在确定了网络结构和处理好数据之后,接下来就是选择合适的激活函数。
激活函数为神经网络引入了非线性特性,使得网络能够处理复杂的非线性问题。
常见的激活函数有 Sigmoid 函数、Tanh 函数和ReLU 函数等。
bp神经网络的课程设计一、课程目标知识目标:1. 理解BP神经网络的原理和基本结构,掌握其计算过程和应用场景。
2. 学会使用BP神经网络进行数据分类和预测,了解其优缺点。
3. 掌握调整BP神经网络参数的方法,提高网络的性能。
技能目标:1. 能够运用BP神经网络构建简单的模型,解决实际问题。
2. 熟练使用相关软件或编程语言实现BP神经网络的训练和预测。
3. 学会分析BP神经网络训练结果,优化网络结构和参数。
情感态度价值观目标:1. 培养学生对人工智能技术的兴趣和好奇心,激发其探索精神。
2. 增强学生的团队协作意识,培养其在合作中解决问题的能力。
3. 使学生认识到BP神经网络在现代科技发展中的重要作用,树立正确的价值观。
课程性质:本课程为信息技术或人工智能相关课程的拓展内容,适用于高年级学生。
学生特点:具备一定的编程基础和数学知识,对人工智能有一定了解,具有较强的学习能力和探索精神。
教学要求:注重理论与实践相结合,强调动手实践,引导学生主动探索,培养学生解决问题的能力和团队协作精神。
通过本课程的学习,使学生能够将BP神经网络应用于实际问题,提高其解决复杂问题的能力。
教学过程中,关注学生个体差异,提供个性化指导,确保学习目标的达成。
二、教学内容1. 引言:介绍人工智能的发展历程,引出BP神经网络在现代科技中的应用价值。
- 章节:人工智能概述2. 理论知识:- BP神经网络基本原理:感知机、多层前馈神经网络、反向传播算法。
- 网络结构:输入层、隐藏层、输出层。
- 激活函数:Sigmoid、ReLU等。
- 学习算法:梯度下降法、动量法等。
- 章节:BP神经网络原理与结构3. 实践操作:- 搭建BP神经网络模型:使用相关软件或编程语言(如Python、MATLAB 等)实现。
- 数据集准备:分类问题、回归问题。
- 网络训练与优化:调整学习率、隐藏层节点数、迭代次数等参数。
- 预测与分析:评估模型性能,优化网络结构。
基于BP神经网络的PID控制器的设计简介:PID控制器是一种常用的控制方法,可以使控制系统快速、稳定地对目标进行调节。
然而,传统的PID控制器需要依赖经验的设置参数,很难适用于非线性复杂的系统。
为了改善这一问题,本文提出了一种基于BP神经网络的PID控制器的设计方法。
一、神经网络介绍BP神经网络是一种常用的人工神经网络,通过反向传播算法进行学习和适应。
它可以用来建模非线性关系、解决分类和回归问题等。
BP神经网络由输入层、隐藏层和输出层构成,通过调整权重和偏置项,使得网络的输出接近于期望输出。
二、PID控制器的基本原理PID控制器是由比例(P)、积分(I)和微分(D)三个部分组成的,它们分别对应了系统的比例性能、整定性能和微分性能。
PID控制器的输出是由目标值与实际值之间的误差来决定的。
比例作用是根据误差的大小进行调节,积分作用是根据误差的积分值进行调节,微分作用是根据误差的变化率进行调节。
三、BP神经网络的PID控制器设计1.建立神经网络模型:确定输入层节点数、隐藏层节点数和输出层节点数。
2.确定权重和偏置项的初始值:可以使用随机数进行初始化。
3.设置训练样本集:训练样本集包括输入和输出的数据,可以根据实际情况进行设置。
4.确定学习率和训练次数:学习率决定了网络的更新速度,训练次数决定了网络的学习程度。
5.神经网络训练:使用BP算法对神经网络进行训练,通过反向传播算法调整权重和偏置项。
6.测试神经网络性能:使用测试数据对神经网络进行测试,评估其性能是否满足要求。
7.参数调整:根据测试结果对PID控制器的参数进行调整,使得神经网络对系统的控制更加精确。
四、实验结果分析通过对比传统的PID控制器和基于BP神经网络的PID控制器,可以发现基于BP神经网络的PID控制器具有更好的系统控制性能。
因为BP神经网络能够自适应地调整参数,适应非线性复杂系统的控制要求。
总结:基于BP神经网络的PID控制器是一种有效的控制方法,可以提高系统控制的精度和稳定性。
基于BP神经网络的非线性函数拟合——程序设计说明程序设计说明:1.确定网络结构首先,需要确定BP神经网络的结构,包括输入层、隐藏层和输出层的节点数。
输入层的节点数由样本的特征数确定,隐藏层的节点数可以通过试验确定,输出层的节点数则由问题的要求确定。
2.初始化网络参数初始化网络的权值和偏置,可以使用随机数生成,初始值不能太大或太小。
权值和偏置的初始值会对模型的训练效果产生影响,一般可以根据问题的复杂程度来选择。
3.前向传播通过前向传播,将样本数据输入到神经网络中,并计算每个神经元的激活值。
激活函数可以选择Sigmoid函数或者ReLU函数等非线性函数。
4.计算误差5.反向传播通过反向传播,将误差从输出层向输入层传播,更新网络的权值和偏置。
反向传播的过程可以使用梯度下降法来更新网络参数。
6.训练网络7.测试网络使用未参与训练的样本数据测试网络的泛化能力,计算测试误差。
如果测试误差较小,说明网络能够较好地拟合非线性函数。
8.参数调优根据训练误差和测试误差结果,可以调整网络的参数,如学习率、隐藏层节点数等,以提高网络的训练效果和泛化能力。
9.反复训练和测试网络根据需要,反复进行训练和测试的过程,直至网络的训练误差和测试误差均满足要求。
这是一个基于BP神经网络的非线性函数拟合的程序设计说明,通过实现以上步骤,可以有效地进行非线性函数的拟合和预测。
在具体实现中,可以使用Python等编程语言和相应的神经网络框架,如TensorFlow、PyTorch等,来简化程序的编写和调试过程。
同时,为了提高程序的性能和效率,可以使用并行计算和GPU加速等技术。
BP神经网络算法BP神经网络算法(BackPropagation Neural Network)是一种基于梯度下降法训练的人工神经网络模型,广泛应用于分类、回归和模式识别等领域。
它通过多个神经元之间的连接和权重来模拟真实神经系统中的信息传递过程,从而实现复杂的非线性函数拟合和预测。
BP神经网络由输入层、隐含层和输出层组成,其中输入层接受外部输入的特征向量,隐含层负责进行特征的抽取和转换,输出层产生最终的预测结果。
每个神经元都与上一层的所有神经元相连,且每个连接都有一个权重,通过不断调整权重来优化神经网络的性能。
BP神经网络的训练过程主要包括前向传播和反向传播两个阶段。
在前向传播中,通过输入层将特征向量引入网络,逐层计算每个神经元的输出值,直至得到输出层的预测结果。
在反向传播中,通过计算输出层的误差,逐层地反向传播误差信号,并根据误差信号调整每个连接的权重值。
具体来说,在前向传播过程中,每个神经元的输出可以通过激活函数来计算。
常见的激活函数包括Sigmoid函数、ReLU函数等,用于引入非线性因素,增加模型的表达能力。
然后,根据权重和输入信号的乘积来计算每个神经元的加权和,并通过激活函数将其转化为输出。
在反向传播过程中,首先需要计算输出层的误差。
一般采用均方差损失函数,通过计算预测值与真实值之间的差异来衡量模型的性能。
然后,根据误差信号逐层传播,通过链式法则来计算每个神经元的局部梯度。
最后,根据梯度下降法则,更新每个连接的权重值,以减小误差并提高模型的拟合能力。
总结来说,BP神经网络算法是一种通过多层神经元之间的连接和权重来模拟信息传递的人工神经网络模型。
通过前向传播和反向传播两个阶段,通过不断调整权重来训练模型,并通过激活函数引入非线性因素。
BP 神经网络算法在分类、回归和模式识别等领域具有广泛的应用前景。
神经网络的设计实例(MATLAB编程)例1 采用动量梯度下降算法训练BP 网络。
训练样本定义如下:输入矢量为p =[-1 -2 3 1-1 1 5 -3]目标矢量为t = [-1 -1 1 1]解:本例的MATLAB 程序如下:close allclearecho onclc% NEWFF——生成一个新的前向神经网络% TRAIN——对BP 神经网络进行训练% SIM——对BP 神经网络进行仿真pause% 敲任意键开始clc% 定义训练样本P=[-1, -2, 3, 1; -1, 1, 5, -3]; % P 为输入矢量T=[-1, -1, 1, 1]; % T 为目标矢量pause;clc% 创建一个新的前向神经网络net=newff(minmax(P),[3,1],{'tansig','purelin'},'traingdm') % 当前输入层权值和阈值inputWeights=net.IW{1,1}inputbias=net.b{1}% 当前网络层权值和阈值layerWeights=net.LW{2,1}layerbias=net.b{2}pauseclc% 设置训练参数net.trainParam.show = 50;net.trainParam.lr = 0.05;net.trainParam.mc = 0.9;net.trainParam.epochs = 1000;net.trainParam.goal = 1e-3;pauseclc% 调用TRAINGDM 算法训练BP 网络[net,tr]=train(net,P,T);pauseclc% 对BP 网络进行仿真A = sim(net,P)% 计算仿真误差E = T - AMSE=mse(E)pauseclcecho off例2 采用贝叶斯正则化算法提高BP 网络的推广能力。
在本例中,我们采用两种训练方法,即L-M 优化算法(trainlm)和贝叶斯正则化算法(trainbr),用以训练BP 网络,使其能够拟合某一附加有白噪声的正弦样本数据。
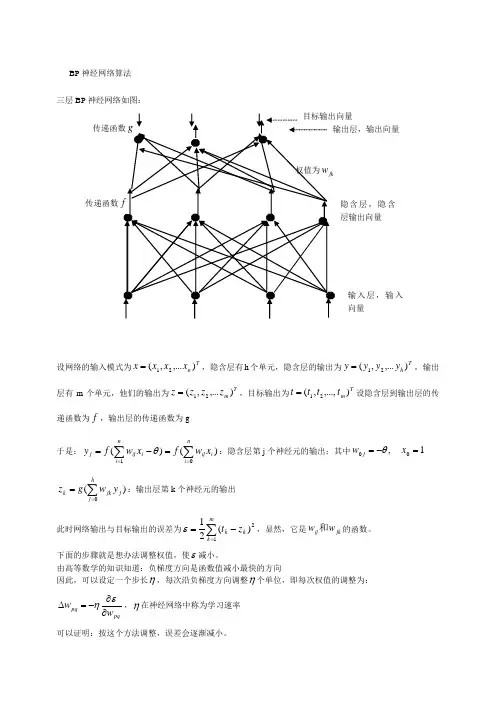
BP 神经网络算法 三层BP 神经网络如图:设网络的输入模式为Tn x x x x ),...,(21=,隐含层有h 个单元,隐含层的输出为Th y y y y ),...,(21=,输出层有m 个单元,他们的输出为Tm z z z z ),...,(21=,目标输出为Tm t t t t ),...,,(21=设隐含层到输出层的传递函数为f ,输出层的传递函数为g于是:)()(1∑∑===-=ni i ij ni iij j x w f xw f y θ:隐含层第j 个神经元的输出;其中1,00=-=x w j θ)(0∑==hj j jk k y w g z :输出层第k 个神经元的输出此时网络输出与目标输出的误差为∑=-=m k k k z t 12)(21ε,显然,它是jk ij w w 和的函数。
下面的步骤就是想办法调整权值,使ε减小。
由高等数学的知识知道:负梯度方向是函数值减小最快的方向因此,可以设定一个步长η,每次沿负梯度方向调整η个单位,即每次权值的调整为:pqpq w w ∂∂-=∆εη,η在神经网络中称为学习速率 可以证明:按这个方法调整,误差会逐渐减小。
隐含层,隐含层输出向量传递函数输入层,输入向量BP 神经网络(反向传播)的调整顺序为: 1)先调整隐含层到输出层的权值 设k v 为输出层第k 个神经元的输入∑==hj j jkk y wv 0-------复合函数偏导公式若取x e x f x g -+==11)()(,则)1()111(11)1()('2k k v v v v k z z ee e e u g kk k k -=+-+=+=---- 于是隐含层到输出层的权值调整迭代公式为: 2)从输入层到隐含层的权值调整迭代公式为: 其中j u 为隐含层第j 个神经元的输入:∑==ni i ijj x wu 0注意:隐含层第j 个神经元与输出层的各个神经元都有连接,即jy ∂∂ε涉及所有的权值ij w ,因此∑∑==--=∂∂∂∂∂-∂=∂∂m k jk k k k j k k k m k k k k j w u f z t y u u z z z t y 002)(')()(ε于是:因此从输入层到隐含层的权值调整迭代为公式为: 例:下表给出了某地区公路运力的历史统计数据,请建立相应的预测模型,并对给出的2010和2011年的数据,预测相应的公路客运量和货运量。
BP神经网络的设计实例BP神经网络(Backpropagation Neural Network)是一种常用的人工神经网络方法,其具有在模式识别、分类、预测等领域具有较好的性能和应用广泛度。
本文将通过一个MATLAB编程的实例,详细介绍BP神经网络的设计过程。
首先,我们需要定义神经网络的结构。
一个BP神经网络的结构通常包括输入层、隐藏层和输出层。
输入层的节点数与输入数据的特征个数相对应,而输出层的节点数则根据具体问题的输出类别个数而定。
隐藏层的节点数一般根据经验确定,可以根据具体问题的复杂程度来调整。
接下来,我们需要初始化神经网络的参数。
这包括各个层之间的连接权重和阈值。
权重和阈值可以随机初始化,通常可以取一个较小的随机数范围,例如(-0.5,0.5)。
这里需要注意的是,随机初始化的权重和阈值如果过大或过小可能导致网络无法正常训练,进而影响预测结果。
然后,我们需要定义神经网络的激活函数。
激活函数通常是一个非线性函数,它的作用是为了引入非线性特征,增加神经网络的拟合能力。
常用的激活函数有sigmoid函数、tanh函数等。
在MATLAB中,可以通过内置函数sigmf和tansig来定义这些激活函数。
接着,我们需要定义神经网络的前向传播过程。
前向传播是指将输入数据通过神经网络,计算得到输出结果的过程。
具体操作可以按照以下步骤进行:1.输入数据进入输入层节点;2.将输入层节点的输出值乘以与隐藏层节点连接的权重矩阵,然后求和,此时得到隐藏层节点的输入值;3.将隐藏层节点的输入值通过激活函数进行激活,得到隐藏层节点的输出值;4.重复上述步骤,将隐藏层节点的输出值乘以与输出层节点连接的权重矩阵,然后求和,此时得到输出层节点的输入值;5.将输出层节点的输入值通过激活函数进行激活,得到输出层节点的输出值。
最后,我们需要定义神经网络的反向传播过程。
反向传播是为了根据输出误差来调整各个层之间的权重和阈值,使得预测结果更接近真实值。
bp算法的设计与实现一、BP算法的概述BP算法,全称为反向传播算法,是一种常用的人工神经网络学习算法。
其主要思想是通过不断地调整神经元之间的权重和阈值,使得网络输出与期望输出之间的误差最小化。
BP算法的核心在于误差反向传播,即将输出层的误差逐层向前传播至输入层,从而实现对权值和阈值的更新。
二、BP算法的设计1. 神经网络结构设计BP算法需要先确定神经网络的结构,包括输入层、隐藏层和输出层。
其中输入层负责接收外部输入数据,隐藏层通过变换将输入数据映射到高维空间中,并进行特征提取和抽象表示。
输出层则将隐藏层处理后的结果映射回原始空间中,并得出最终结果。
2. 激活函数设计激活函数用于计算神经元输出值,在BP算法中起到了非常重要的作用。
常见的激活函数有sigmoid函数、ReLU函数等。
其中sigmoid函数具有平滑性和可导性等优点,在训练过程中更加稳定。
3. 误差计算方法设计误差计算方法是决定BP算法效果好坏的关键因素之一。
常见的误差计算方法有均方误差法、交叉熵误差法等。
其中均方误差法是最常用的一种方法,其计算公式为:E = 1/2*(y - t)^2,其中y为网络输出值,t为期望输出值。
4. 权重和阈值调整方法设计权重和阈值调整方法是BP算法的核心所在。
常见的调整方法有梯度下降法、动量法、RMSprop等。
其中梯度下降法是最基础的一种方法,其核心思想是通过不断地迭代来更新权重和阈值。
三、BP算法的实现1. 数据预处理在使用BP算法进行训练前,需要对输入数据进行预处理。
常见的预处理方式包括归一化、标准化等。
2. 神经网络初始化神经网络初始化需要设置初始权重和阈值,并将其赋给神经元。
初始权重和阈值可以随机生成或者根据经验设置。
3. 前向传播前向传播过程中,输入数据从输入层开始逐层传递至输出层,并通过激活函数计算出每个神经元的输出值。
4. 反向传播反向传播过程中,先计算出输出层误差,并逐层向前传播至输入层。
基于BP神经网络的PID控制器设计1.引言在工业控制系统中,PID(比例、积分、微分)控制器被广泛应用于各种自动控制任务。
然而,传统的PID控制器在处理非线性、时变以及多输入多输出(MIMO)系统时存在一些固有的局限性。
为了克服这些问题,本文提出了基于BP神经网络的PID控制器设计方法。
2.BP神经网络BP神经网络是一种前向反馈的人工神经网络,具有强大的非线性建模能力和自适应性能。
它由输入层、隐藏层和输出层组成,每个神经元与前一层的所有神经元和后一层的所有神经元连接。
BP神经网络通过反向传播算法来训练权重和偏置,实现输入与输出之间的映射关系。
3.PID控制器PID控制器由比例项、积分项和微分项组成,具有良好的稳定性和抗干扰能力。
比例项根据控制误差与参考值的比例进行调整,积分项根据控制误差与时间的积分进行调整,微分项根据控制误差的变化率进行调整。
4.BP神经网络与PID控制器结合将BP神经网络与PID控制器相结合,可以克服传统PID控制器在处理非线性、时变和MIMO系统时的局限性。
具体而言,可以使用BP神经网络来精确建模控制对象的非线性行为,并将其应用于PID控制器中,实现自适应调节。
在实际应用中,可以按照以下步骤进行基于BP神经网络的PID控制器设计:(1)收集系统输入输出数据,并进行预处理,例如归一化处理。
(2)使用BP神经网络对控制对象进行建模。
选择适当的网络结构、激活函数和误差函数,并使用反向传播算法进行网络训练。
(3)设计PID控制器,确定比例项、积分项和微分项的权重。
(4)将BP神经网络的输出作为PID控制器的输入,进行控制操作。
根据控制误差和调节参数,调整PID控制器的输出。
(5)反复迭代并调整BP神经网络和PID控制器的参数,使系统能够快速、准确地响应控制需求。
5.实验验证为了验证基于BP神经网络的PID控制器的有效性,可以选择一个具有非线性、时变特性的控制对象进行实验。
在实验中,可以使用MATLAB或其他神经网络工具箱来实现BP神经网络,并结合传统PID控制器进行控制。
基于BP神经网络的股票价格预测模型设计与分析股票价格的预测一直是投资者和分析师们关注的焦点之一。
随着信息技术的发展,神经网络成为了股票价格预测的一种重要工具。
其中,反向传播(Backpropagation,BP)神经网络在股票价格预测中得到了广泛应用。
本文将介绍基于BP神经网络的股票价格预测模型的设计和分析方法。
一、BP神经网络基本原理BP神经网络是一种具有反馈连接的前馈神经网络。
它的基本原理是通过权值和偏置的反向传播来调整网络的输出误差,从而使预测结果逐步逼近真实值。
BP神经网络通常包括输入层、隐藏层和输出层,其中隐藏层的神经元数量和层数的选择是通过试验和调整来确定的。
二、BP神经网络的设计过程1. 数据集的准备在进行股票价格预测之前,需要准备大量的历史数据作为训练集。
这些数据应该包括多个相关因素,如时间、交易量、交易额和股票技术指标等。
2. 数据的预处理在输入到神经网络之前,需要对数据进行预处理。
这包括数据的标准化、归一化和去除异常值等。
标准化可以将数据转化为均值为0,方差为1的形式,以提高网络的鲁棒性。
3. 神经网络的构建根据问题的复杂性和数据的特点,确定神经网络的结构。
一般情况下,一个基本的BP神经网络包括输入层、若干个隐藏层和输出层。
隐藏层的神经元数目通常取决于问题的复杂性,而输出层的神经元数目取决于预测的目标。
4. 神经网络的训练将数据集输入到神经网络中,通过反向传播算法来调整网络的权值和偏置,以减小输出误差。
训练过程中需要选择合适的学习率、激活函数和迭代次数等参数。
5. 神经网络的测试在完成神经网络的训练后,需要通过测试集来验证模型的性能。
通过与真实值进行比对,可以评估预测误差,并调整网络参数以提高模型的准确性。
三、BP神经网络模型的分析1. 模型的准确性通过计算预测值与真实值之间的误差,可以评估BP神经网络模型的准确性。
常用的评价指标包括均方根误差(Root Mean Square Error,RMSE)和平均绝对误差(Mean Absolute Error,MAE)等。
⼈⼯智能实验报告-BP神经⽹络算法的简单实现⼈⼯神经⽹络是⼀种模仿⼈脑结构及其功能的信息处理系统,能提⾼⼈们对信息处理的智能化⽔平。
它是⼀门新兴的边缘和交叉学科,它在理论、模型、算法等⽅⾯⽐起以前有了较⼤的发展,但⾄今⽆根本性的突破,还有很多空⽩点需要努⼒探索和研究。
1⼈⼯神经⽹络研究背景神经⽹络的研究包括神经⽹络基本理论、⽹络学习算法、⽹络模型以及⽹络应⽤等⽅⾯。
其中⽐较热门的⼀个课题就是神经⽹络学习算法的研究。
近年来⼰研究出许多与神经⽹络模型相对应的神经⽹络学习算法,这些算法⼤致可以分为三类:有监督学习、⽆监督学习和增强学习。
在理论上和实际应⽤中都⽐较成熟的算法有以下三种:(1) 误差反向传播算法(Back Propagation,简称BP 算法);(2) 模拟退⽕算法;(3) 竞争学习算法。
⽬前为⽌,在训练多层前向神经⽹络的算法中,BP 算法是最有影响的算法之⼀。
但这种算法存在不少缺点,诸如收敛速度⽐较慢,或者只求得了局部极⼩点等等。
因此,近年来,国外许多专家对⽹络算法进⾏深⼊研究,提出了许多改进的⽅法。
主要有:(1) 增加动量法:在⽹络权值的调整公式中增加⼀动量项,该动量项对某⼀时刻的调整起阻尼作⽤。
它可以在误差曲⾯出现骤然起伏时,减⼩振荡的趋势,提⾼⽹络训练速度;(2) ⾃适应调节学习率:在训练中⾃适应地改变学习率,使其该⼤时增⼤,该⼩时减⼩。
使⽤动态学习率,从⽽加快算法的收敛速度;(3) 引⼊陡度因⼦:为了提⾼BP 算法的收敛速度,在权值调整进⼊误差曲⾯的平坦区时,引⼊陡度因⼦,设法压缩神经元的净输⼊,使权值调整脱离平坦区。
此外,很多国内的学者也做了不少有关⽹络算法改进⽅⾯的研究,并把改进的算法运⽤到实际中,取得了⼀定的成果:(1) 王晓敏等提出了⼀种基于改进的差分进化算法,利⽤差分进化算法的全局寻优能⼒,能够快速地得到BP 神经⽹络的权值,提⾼算法的速度;(2) 董国君等提出了⼀种基于随机退⽕机制的竞争层神经⽹络学习算法,该算法将竞争层神经⽹络的串⾏迭代模式改为随机优化模式,通过采⽤退⽕技术避免⽹络收敛到能量函数的局部极⼩点,从⽽得到全局最优值;(3) 赵青提出⼀种分层遗传算法与BP 算法相结合的前馈神经⽹络学习算法。