ˆ y m ( k 1) f ( y p ( k ),..., y p ( k n 1), u ( k ),..., u ( k m 1))
z -1
. . .
z -1
u
z -1
. . .
ym
z -1
M
^ P
3.2 网络模型使用时结构图
由图3.2可以得到网络模型的输入/输出关系式为:
ˆ y m ( k 1) f ( y m ( k ),..., y m ( k n 1), u ( k ),..., u ( k m 1))
3.2 逆模型建立
u
+ -
P
yp
z -1 z -1 z -1
C
z -1
图3.3 直接逆模型训练图
yr
z -1
. . .
z -1
u
z -1
第三章 BP网络在智能系统中的 建模与控制
• 3.1 直接正向模型建立 • 3.2 逆模型建立 • 3.3 系统中的控制
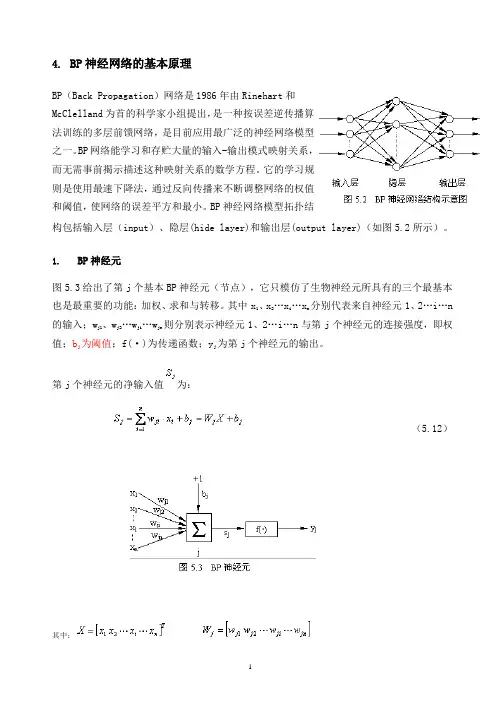
Hale Waihona Puke 3.1 直接正向模型建立假定(被控)系统离散型非线性差分方程为:
y p ( k 1) f ( y p ( k ),..., y p ( k n 1), u ( k ),..., u ( k m 1))
即由非线性函数f所确定的系统,在k + 1时刻的输出取 决于过去n个时刻的输出值,以及过去m个时刻的输入 值。
d
u
d*
yp
P
z -1
. . .
z -1
ym
z -1
. . .
-
+
z -1
M
学习规则
![[课件]人工神经网络-BP神经网络PPT](https://uimg.taocdn.com/6c34dec86294dd88d1d26b0f.webp)