并联运动模拟台铰链间隙误差分析
- 格式:doc
- 大小:24.00 KB
- 文档页数:3
ISSN1000 0054 CN11 2223/N 清华大学学报(自然科学版)J T sing hua Un iv(Sci&Tech),2010年第50卷第11期2010,V o l.50,N o.1113/301811 1814,18193 PRS并联机构误差运动学分析及辨识黄 鹏1, 汪劲松2, 王立平1, 关立文1(1.清华大学精密仪器与机械学系,北京100084; 2.电子科技大学,成都610054)收稿日期:2009 10 12基金项目:国家科技支撑计划项目(2006BAF01B09);国家自然科学基金资助项目(50775125);国家 八六三 高技术项目(2007AA041901)作者简介:黄鹏(1983 ),男(汉),北京,博士研究生。
通讯作者:王立平,教授,E m ail:lpw ang@m 摘 要:少自由度并联机构是并联机构的重要分支之一。
和全自由度并联机构相比,由于受到运动约束,因此在运动学标定的过程中需要对此加以分析,结合运动学方程组得到完整的辨识矩阵。
该文基于3 PRS少自由度并联机构,首先对少自由度并联机构运动学标定进行误差建模,通过理论分析得到最简化的误差模型,并使用遗传算法进行了测量位姿选择,其次通过仿真计算验证了分析的正确性和有效性,最后结合仿真结果提出一种误差辨识能力分析方法。
关键词:少自由度并联机构;运动学标定;误差辨识中图分类号:T H751文献标志码:A 文章编号:1000 0054(2010)11 1811 04Kinematical error analysis and identification of a3 PRS parallel mechanismH UANG Peng1,WAN G Jin son g2,WANG Lipin g1,G UAN Liwen1(1.Department of Precision Instruments and Mechanology,Ts inghua University,Beijing100084,China;2.Univers ity of Electronic Science and Technology of China,Chengdu610054,China)Abstract:Lim ited DoF(degree of fr eedom)parallel mechanism is on e of the important b ranches in a parallel m pared w ith full DoF parallel m echan ism,lim ited DoF parallel m echan ism, w ith motion con strain ts,needs to be analyzed in the process of kinem atical calib ration to obtain complete identification matrix combined w ith kinematical equation s et.In this paper,a k inematical error model w as es tablis hed and a minim al error m od el w as derived b as ed on3 PRS limited DoF parallel mechanism.M easuring poses w ere optimized u sing th e genetic alg orith m.S imulations show th e correctn es s and effectiven ess of th e analysis,w ith a s cheme of error identifiability analysis being d eveloped.Key words:li mited DoF parallel mechani sm;ki nematical calibration;error identification少自由度并联机构拥有并联机构的高刚性、高精度、高灵活性、高承载能力等诸多优点,同时在一定程度上减少了多自由度并联机构工作空间小、运动副多、制造装配困难、生产成本高等问题[1],特别是少自由度并联机构与传统串联机构组成混联机构,其更好地融合了串、并联机构的优点,非常适合于航空、航天、汽车等领域具有复杂自由曲面零件加工的机床机构,因此具有广阔的应用空间和前景。

考虑铰链间隙的水面并联稳定平台动力学分析李豪杰;张合;李珂翔;谢克峰【摘要】针对某小型浮式稳定平台结构紧凑、负载惯量大的特点,设计了一种以少自由度并联机构为基础的改进型串联与并联机构.根据该平台的结构特点,进行了运动学分析,推导了系统雅可比矩阵,并利用Lagrange方法建立了平台的动力学模型,分析了平台的动力学特性.为分析含间隙的支链受力,将其简化为刚体一弹簧模型,通过改进的Hertz接触理论,采用非线性弹簧阻尼模型计算接触力,最终建立了含铰链间隙的平台动力学模型.数值计算与实验结果表明了数据建模的有效性,同时铰链间隙对动平台的位置精度和动力学特性产生了显著影响,对平台结构产生了较强的冲击.【期刊名称】《兵工学报》【年(卷),期】2017(038)001【总页数】6页(P129-134)【关键词】机械学;并联机构;稳定平台;铰链间隙;动力学分析【作者】李豪杰;张合;李珂翔;谢克峰【作者单位】南京理工大学智能弹药技术国防重点学科实验室,江苏南京210094;南京理工大学智能弹药技术国防重点学科实验室,江苏南京210094;中国船舶重工集团公司第724研究所,江苏南京210003;南京理工大学智能弹药技术国防重点学科实验室,江苏南京210094【正文语种】中文【中图分类】TP242.3工作于水面的小型无人浮式稳定平台,搭载有光电探测设备,因其体积较小、运输方便等优点,在海洋区域侦察等方面具有重要的应用价值。
平台性能的优劣决定了探测设备能否正常工作,作为负载的探测设备质量较重,波浪绕动大,平台尺寸有限制,这些特点决定了平台的结构形式必须具有刚度大,承载能力强,动态性能好等特性[1]。
并联机构具有上述优点,因而在运动平台领域得到了广泛应用。
通常并联机构的设计指标主要为满足大负载和高刚度等要求,故多采用电动缸,驱动能力有限,空间占用大,并且会带来额外负载,因此不适用于本文的稳定平台[2-4]。
本文提出一种新型稳定平台,其特点是将滚珠丝杆和大功率电机固定,采用固定长度的支撑杆连接动平台,从而具有空间利用率高和负载能力强等优点。
第4期2021年4月机械设计与制造Machinery Design&M anufacture287全方位装配机器人的刚度误差分析叶长龙,万缯齐,于苏洋,姜春英(沈阳航空航天大学机电工程学院,辽宁沈阳110136)摘要:为了提高工作效率并节约劳动力,设计了一种可执行装配任务的全方位装配机器人,此机器人能在实际工程中 执行一些简单的装配任务。
为提高机器人在执行装配作业任务时的装配精度,对其刚度误差进行分析。
根据机器人的结 构特点并结合旋量理论对并联机构各支链进行建模,推导出机器人的刚度模型。
通过仿真分析得出了支链长度以及载荷 对系统刚度的理论影响。
结合实验测试对刚度矩阵进行修正,得出不同姿态下系统刚度引起的误差。
详细分析误差的产 生的原因,提出了减小误差的改进方案。
关键词:装配精度;刚度分析;旋量理论;误差分析中图分类号:T H16;TP242文献标识码:A文章编号:1001-3997(2021 )04-0287_06Stiffness Error Analysis of an Omni-Directional Assembly RobotYE Chang-long, WAN Zeng-qi, YU Su-yang, JIANG Chun-ying(S c h o o l o f M e c h a t r o n i c s E n g i n e e r i n g Shenyang Ae ro spa ce U n i v e r s i t y,L i a o n i n g Shenyang110136,China)Abstract:7/i order to improve work efficiency and save labor^an omni-directional assembly robot that can perform assembly tasks is designed.The robot can perform some simple assembly tasks in actual engineering.In order to improve the assembly precision of robot in the execution of assembly tasks,the stiffness error is analyzed.A ccording to the structural characteristics of t he robot and the theory of s crew^the branches of the parallel mechanism are modeled,and the stiffness model o f the robot is derived.Through the simulation analysis ythe theoretical influence of the length of the branch and the load on the stiffness of the system is obtainedThe stiffness matrix is modified by combining experimental tests to obtain the error caused by the system stiffness under different attitudes.A detailed analysis of the causes of the error is presented jcuid an improved scheme for reducing the error is proposedKey Words: Assembly Accuracy;Stiffness Analysis;Screw Theory;Error Analysisl引言机器人以其多功能性以及良好的适应性被广泛应用于生产 实践中。
第23卷第10期2006年10月52机械设计JOURNALOFMACHINEDESIGNVol.23No.10Oct.2006并联6自由度运动模拟平台的误差分析赵强(东北林业大学交通运输工程学院,黑龙江哈尔滨150040)*摘要:位姿误差是影响并联6自由度模拟平台性能的重要因素,文中采用矩阵微分法推导了原始误差与平台位姿误差之间的关系式,基于蒙特卡洛法对平台误差的概率分布进行研究,并分析了平台误差对各种原始误差的敏感度。
分析表明6个缸长的误差敏感度最大,其次是上下铰点的Z向位置误差。
以上研究结果对实际并联6自由度运动模拟台的设计具有参考作用。
关键词:并联运动模拟台;误差;蒙特卡洛法;敏感度分析;中图分类号:U666.158 文献标识码:A 文章编号:1001-2354(2006)10-0052-03 并联6自由度运动模拟平台在车辆、船舶和飞机等的运动模拟领域应用比较广泛,它采用的是Stewart平台机构[1],位姿精度是评价其性能好坏的一项重要指标,Wang等采用矩阵法分析了铰链加工及装配误差对6-UPS型平台位姿精度的影响,并提出了标定和补偿方法[2,3]。
周跃发等给出了描述平台位姿误差和液压缸长度误差之间关系的雅可比矩阵,但未给出其它原始误差与平台位姿误差的关系式。
文中首先分析产生平台位姿误差的42个原始误差,采用矩阵微分法推导出原始误差与平台位姿误差之间的关系式,进一步采用蒙特卡洛法进行误差模拟,并分析平台位姿误差对各个原始误差的敏感度,所得分析结果可以为并联模拟台的精度设计提供参考。
[4](3)液压缸长度误差:来源于液压缸的加工误差及伺服跟踪误差,用dLi表示。
以上共计42个原始误差量。
为了描述模拟台的运动,如图1所示建立两个坐标系:固连于底座的静坐标系O-XYZ以及平台的连体坐标系O1-X1Y1Z1。
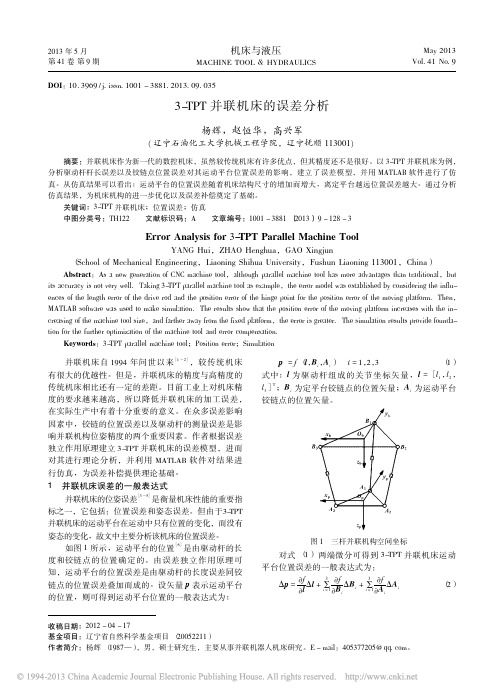
则第i个液压缸的长度可以写为:Li=iiii i=1,2,,6[xai,yai,zai,1]T;Bi 下铰点Bi在静系中的齐次坐标矩阵,[xbi,ybi,zbi,1]T;T 平台连体系到静系的坐标变换矩阵。
并联运动模拟台铰链间隙误差分析
球铰理论上具有结构简单、运动灵活、耐磨性好和承载力强等优点,常用于并联运动模拟机构。
但由于球铰间隙一般较大,对模拟台运动精度的影响不可忽略[1]。
目前,提高球铰精度和刚度的方法,主要有提高加工精度、提高表面质量和采用铰链消隙装置等措施。
但随着精度的提高,成本和实现难度均大幅增加,因此,研究铰链间隙对机构精度的影响,从而根据机构精度需要合理确定球铰间隙,优化精度分配,对提高并联机构的性价比意义重大。
1 具有SPS驱动支链的3-DOF并联模拟台的结构
本文针对外场试验用激光通信光端机运动模拟台的技术指标要求,设计了3-DOF(三自由度)并联模拟台的结构[2],运动模拟台位置精度要求为1 mrad,经误差分配,球铰引起的误差应小于0.5 mrad,3-DOF 并联模拟台如图1所示。
如图1所示,三自由度并联运动模拟台由三层平台、三个驱动电动缸、四个过渡支撑杆和一个中心支撑组成。
其中:三个平台相互平行且同心,中平台为多边形,动平台和中平台之间有四个固定支撑,两个纵向的电动缸成90°分配,横向的电动缸中心线与基台平行,且与两个纵向电动缸垂直。
其原理为控制三个电动缸的伸缩量,以实现并联模拟台横滚、俯仰和偏航的角度,中心支撑主要承载整个摇摆台的重
量。
2 球铰间隙模型分析
5 MATLAB编程与仿真
运用MATLAB进行编程仿真,得到球铰间隙影响下并联模拟台的角度误差。
由图5可知,球铰间隙对运动模拟台横滚角度的峰峰值为mrad,方位和俯仰方向误差与横滚分析方法,经误差合成,由球铰引起的最大误差小于mrad,满足模拟台角位置精度要求。
6 结论
运用D-H法和坐标变换法分析了单开支链下球铰间隙对模拟台姿态角度精度的影响,建立了球铰间隙与并联机构精度的简单实用的数学模型,为运动模拟台中球铰的选择提供了理论依据。
参考文献
[1] 崔道碧.关节间隙对机器人末端执行器位姿误差的影响[J].湖南大学学报:自然科学版,1999,26(2):32-36.(CUI Dao-bi.Effect of Gap of Key Links on Location-posture Error for Tip Executing Apparatus of Robot[J].Journal of Hunan University(Natural Sciences Edition),1999,26(2):32-36.
[2] 汪劲松,白杰文,高猛,等.Stewart平台铰链间隙的精度分析[J].清华大学学报:自然科学版,2002,42(6):758-761.W ANG Jin-song,BAI Jie-wen,GAO Meng,ZHENG Hao-jun,LI Tie-min.Accuracy analysis of joint-clearances in a Stewart platform[J].J T singhua Univ(Sci &Tech),2002,42(6):758-761.
[3] 梁辉,白志富,陈五一.一种驱动冗余并联机床的铰链间隙误差分析[J].机床与液压,2006(4):7-9.LIANG Hui,BAI Zhi-fu,CHEN Wu-yi.On the Joint Error of a Redundantly Actuated Parallel Machine Tool[J].Machine Tool and Hydraulics,2006(4):7-9.
[4] 洪嘉振.计算多体系统动力学[M].北京:高等教育出版社,1999:37-60.HONG putational Dynamics of Multibody Systems[M].Beijing:Higher Education Press,1999:37-60.
[5] 焦国太,冯永和,王锋,等.多因素影响下的机器人综合位姿误差分析方法[J].应用基础与工程科学学报,2004,12(4):435-442.Jiao Guo-tai Feng Yong-he,Wang Feng,et.Synthetically analysis of the robot pose error resulting from various factors[J].Journal of Basic Science and Engineering,2004,12(4):435-442.。