自由设站测量三角高程法
- 格式:doc
- 大小:66.00 KB
- 文档页数:4
精密控制测量技术在中低速磁浮交通中的应用龚鹏程中铁第五勘察设计院集团有限公司,北京 102600中低速磁浮交通作为一种现代新型轨道交通工具,经过数十年的发展,已逐步从试验研究转向工程建设,陆续已有北京地铁S1线、长沙机场线等线路建成投入运营。
中低速磁浮交通凭借建设成本低的优势,具有一定的市场需求潜力。
目前,国内高速铁路建设发展迅猛,精密控制测量技术应用成熟。
精测网在勘察设计、施工建设、运营维护各阶段保持坐标基准统一稳定,起着重要作用。
但磁浮交通建造屈指可数,磁浮交通的施工工艺、结构构造与高速铁路存在较大区别。
将高速铁路精密控制测量技术应用于中低速磁浮交通设计、施工、运营中,将为磁浮交通提供稳定、可靠的坐标基准。
1.项目概况清远市磁浮旅游专线一期工程里程范围 DK19+535 ~DK27+558,正线全长 8.014km,设计速度100 km/ h。
其中高架线路长度6.564km,低置结构线路长度0.609km,隧道长度 0.51km。
设银盏温泉、长隆大道、长岗站(预留)、长隆主题公园站4座车站,平均站间距为2.47km,其中最大站间距为 3.285km(银盏站至莲湖站),最小站间距为 1.506km(长岗站至长隆主题公园站),正线铺轨长度15.6km。
设银盏停车场 1座,停车场铺轨长度2.4km。
2.精密控制测量的实施2.1坐标系统的选择磁浮交通工程能够平顺建设、运营的关键在于轨排铺架的准确性。
地球球面向平面投影时,施工坐标反算的边长值与现场实测值存在投影变形差异。
参照高速铁路项目精测网CPⅢ测设经验,在满足边长投影长度变中低速磁浮交通具有线路小半径、选线灵活的特点,作为新型轨道交通逐渐兴起。
以清远市磁浮旅游专线工程建设为例,建立精密控制网,为设计、施工、运营提供精确的位置基准。
本文详细介绍了精密控制测量技术在中低速磁浮交通中的应用,这对类似工程项目有较高的参考价值。
【关键词】中低速磁浮交通;控制测量;精测网;轨道控制网;CPⅢ测量作者简介:龚鹏程,中铁第五勘察设计院集团有限公司工程师,工学学士。

§4-6 三角高程测量一、三角高程测量原理及公式在山区或地形起伏较大的地区测定地面点高程时,采用水准测量进行高程测量一般难以进行,故实际工作中常采用三角高程测量的方法施测。
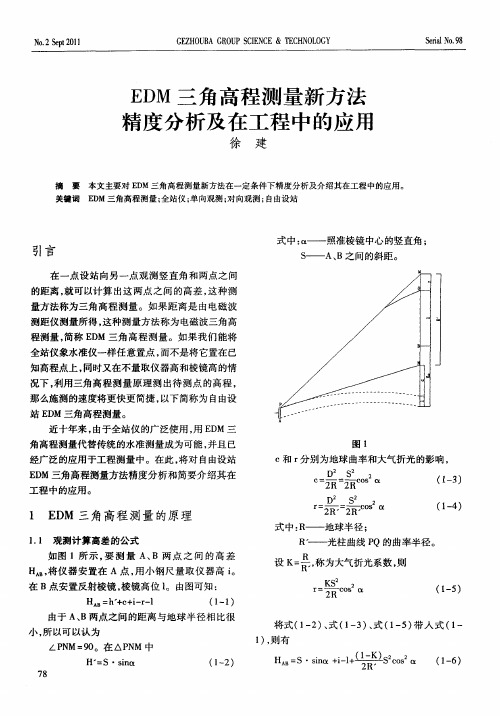
传统的经纬仪三角高程测量的原理如图4-12所示,设A点高程及AB两点间的距离已知,求B点高程。
方法是,先在A点架设经纬仪,量取仪器高i;在B点竖立觇标(标杆),并量取觇标高L,用经纬仪横丝瞄准其顶端,测定竖直角δ,则AB两点间的高差计算公式为:故(4-11)式中为A、B两点间的水平距离。
图4-12 三角高程测量原理当A、B两点距离大于300m时,应考虑地球曲率和大气折光对高差的影响,所加的改正数简称为两差改正:设c为地球曲率改正,R为地球半径,则c的近似计算公式为:设g为大气折光改正,则g的近似计算公式为:因此两差改正为:,恒为正值。
采用光电三角高程测量方式,要比传统的三角高程测量精度高,因此目前生产中的三角高程测量多采用光电法。
采用光电测距仪测定两点的斜距S,则B点的高程计算公式为:(4-12)为了消除一些外界误差对三角高程测量的影响,通常在两点间进行对向观测,即测定hAB和hBA,最后取其平均值,由于hAB和hBA反号,因此可以抵销。
实际工作中,光电三角高程测量视距长度不应超过1km,垂直角不得超过15°。
理论分析和实验结果都已证实,在地面坡度不超过8度,距离在1.5km以内,采取一定的措施,电磁波测距三角高程可以替代三、四等水准测量。
当已知地面两点间的水平距离或采用光电三角高程测量方法时,垂直角的观测精度是影响三角高程测量的精度主要因素。
二、光电三角高程测量方法光电三角高程测量需要依据规范要求进行,如《公路勘测规范》中光电三角高程测量具体要求见表4-6。
表4-6 光电三角高程测量技术要求往返各注:表4-6中为光电测距边长度。
对于单点的光电高程测量,为了提高观测精度和可靠性,一般在两个以上的已知高程点上设站对待测点进行观测,最后取高程的平均值作为所求点的高程。


简析三角高程测量新方法原理三角高程测量是工程施工中传递高程的一种基本的测量方法,由于传统的三角高程测量精度不仅受大气折光、垂直角观测精度等因素影响,更重要的是受量取仪器的高度产生的垂线偏差因素影响,故在施工单位中使用并不广泛,随着几何水准测量的发展,几何水准测量成为了精密高程控制的主要方法,而使传统的三角高程测量只是在一些特殊情况下(如山区、丘陵区等高差较大地区)的几何水准测量的补充。
近几年,随着国内高速铁路大规模的建设,而高速铁路多设计为高架路段,桥梁工程所占比例在70%以上,有的桥长达几十公里,要保证桥上的无砟轨道高程定位精度达到±1mm,如何将地面上的高程精确地引测到十几米高的桥面上,这是施工单位所必须要解决的测量难题。
根据无砟轨道施工精度要求,桥上每2km左右应引测一个二等水准点,若采用精密几何水准测量法,不仅实施难度非常大且精度也难以保证,而传统的三角高程测量虽然现场实施较简单,但是受大气折光、垂直角及垂线偏差等因素影响,就很难满足精度要求。
要实现把地面上的高程高精度地引测至桥上,若采用三角测量方法,关键是要消除仪器高度产生的垂线偏差的影响。
三角高程测量新方法的原理新方法的原理:就是全站仪任意点设站,后视地面上已知的高程控制点,前视待测高程点,设定前后视点上的棱镜高度一致,在测量过程中不需要量取仪器高和棱镜高,测量完成后推算出待测点的高程。
A点为地面已知高程点,B点为待求高程点,为了测量A点与B点间高差,在中间位置设立全站仪,A点与B点处分别安置等高棱镜组,利用三角高程测量原理可得(暂不考虑大气折光因素):HA+V-△h1=HB+V-△h2则A点与B点间高差△HA-B为:△HA-B=HB-HA=△h2-△h1 (1)由上式可知,A点与B点间高差已自行消除了仪器高和棱镜高,故影响三角高程测量精度的一个重要因素就消除了。
三角高程测量新方法的计算公式及精度分析1、单向观测三角高程测量高差的计算公式:(2)或:(3)式中 -------------三角高程测量的高差;-------------全站仪至棱镜的斜距;--------------全站仪至棱镜的平距;--------------垂直角;---------------全站仪高度;--------------棱镜高;-------------地球平均曲率半径,约为6370km;-------------大气垂直折光系数,根据实际情况一般取0.08~0.14;2、单向观测三角高程测量高差的误差计算公式:(4)因新方法中是不需要量取仪器高和棱镜高的,故不存在仪器高和棱镜高的误差的,则式(4)可变换为:(5)3、测量精度分析:由式(5)可知,单向观测三角高程测量高差的误差只与距离、垂直角的误差和两气差有关,因此A点与B点间的高差计算公式为:(6)或:(7)由上式可推导出A点与B点的高差误差公式为:(8)单向观测三角测量误差分析如下:采用测角精度2"、测距精度2mm±(2*D)ppm全站仪和带气泡的对中杆棱镜组进行三角高程测量时,即、,控制测距在250m以内,垂直角在28°以内,球气差误差一般按()进行计算,則可达到三、四等水准精度(三等为,四等);若采用测角精度1"、测距精度1mm±(1*D)ppm全站仪、强制归心安装精密棱镜组,进行三角高程测量时,控制测距在100m之内、垂直角在25°以内,则可达到二等水准精度,即三角高程测量新方法的应用石武客运专线河北段,大部分路段为高架桥,架梁后桥面与地面的平均高差在20m左右,而根据无砟轨道施工要求,每2km一处应从地面高程控制点引测至桥面上。

全站仪三角高程测量的方法与误差分析摘要:本文介绍了三角高程测量原理以及全站仪三角高程测量的不同方法,对于每种方法所能达到的精度进行分析。
关键词:三角高程测量;单向观测;对向观测;中间自由设站;精度分析1.前言全站仪三角高程测量可以少受地形限制,在山区、高架桥、深基础施工高程放样中全站仪三角高程测量具有水准测量无法比拟的优越性。
可以用于路、桥、涵、墩、台、深基础的施工高程测量,提高了精度、效率。
对各种施工条件下的三角高程测量方法:高程放样测量、后方交会三角高程测量、悬高测量等进行了介绍和探讨,实践表明,全站仪三角高程测量完全可以取代三、四等水准测量,并有取代二等水准仪的趋势。
2.仪器和基本原理2.1全站仪的介绍与使用全站仪的工作特点:1、能同时测角、测距并自动记录测量数据;2、设有各种野外应用程序,能在测量现场得到归算结果;3、能实现数据流;全站仪几种测量模式介绍:1、角度测量模式;2、距离测量模式;3、坐标测量模式2.2三角高程测量的基本原理式中:S往、S返、a 往和a返分别为往返观测的斜距和竖直角,i 往、i返、v 往和v返分别为往返观测的仪器高和棱镜高,K 往和K 返分别为往返观测时的大气折光系数。
在全站仪进行往返测量时,如果观测是在相同气象条件下进行的,特别是在同一时间进行,则可假定大气折光系数对于反向观测基本相同,因此可得对向观测计算高差的基本公式为:(3-2-4)4.2.2 全站仪对向三角高程测量的中误差根据误差传播定律4.2.3 全站仪中点法高程测量的中误差根据误差传播定律,对式(3-3-4)进行微分,并转变为中误差关系式,则式(3-3-4)可变化为:为了对全站仪高程测量的 3 种方法进行验证,分析各种方法的精度,本研究选取 m=±2 &精度的全站仪为例,其测距精度为由表 2 可知,3 种测量方法中对向观测的误差最低,精度最好,中点法测量次之,单向高程测量精度最差。
南昌工程学院毕业论文测绘工程专业毕业论文题目全站仪三角高程测量的方法与误差分析学生姓名倪忠利班级07测绘工程学号2007101191指导教师陈伟完成日期 2010年 06月 17 日全站仪三角高程测量的方法与误差分析Total Station trigonometric leveling method and error analysis 总计毕业设计(论文) 25 页表格 2 个插图 3 幅摘要本文介绍了三角高程测量原理以及全站仪三角高程测量的不同方法,对于每种方法所能达到的精度进行分析。
在相同条件下采用不同的方法, 对高差精度的影响是不同的, 所能达到的测量精度等级要求也是不一样的。
从而在实际生产应用中可针对不同的精度要求和具体的客观实际情况选择不同的测量方法。
关键词:三角高程测量单向观测对向观测中间自由设站精度分析AbstractThis paper introduces the measuring principle and triangular elevation of trigonal height measurement method for each different, the precision of the method can be analyzed.Under the same conditions used different methods, the influence of accuracy of elevation is different, can achieve the measurement precision level requirement is different.Thus in the actual production application can be in view of the different accuracy and the objective reality of specific select different measuring methodsKey word: trigonometric levelling ;One-way observation ;Two-way observation ;Free among set up observation;Precision analysi目录摘要 IAbstract II第一章绪论 11.1 前言 11.2 全站仪三角高程测量的研究发展与现状 21.3 研究的意义及其在工程上的应用 3第二章全站仪三角高程测量 42.1 全站仪的介绍与使用 42.2 三角高程测量的发展史 52.3 三角高程测量的基本原理 5第三章全站仪三角高程测量的方法 83.1 单向观测 83.2 双向观测 93.3 中间自由设站观测 10第四章误差分析 124.1 影响误差的因子 124.2 误差分析 134.2.1全站仪单向三角高程测量的中误差 134.2.2 全站仪对向三角高程测量的中误差 144.2.3 全站仪中点法高程测量的中误差 14 结论与展望 18参考文献 20致谢 21第一章绪论1.1 前言全站仪三角高程测量作为高程测量的一种有效手段, 已被广泛应用于生产实践中。
浅谈自由设站三角高程测量及其在CPIII建网中的应用摘要:高速铁路建立轨道控制网(CPIII网),需要进行二等水准加密。
对于特大桥由于桥梁长度大,为了满足CPIII测量精度必须在桥梁中间加密若干二等水准点,但是高差很大,水准测量没有办法完成,只能利用三角高程测量进行高程传递。
本文简要分析了这种高程传递的方法和特点,希望可以提供一些有价值的参考意见。
关键词:高速铁路;高铁轨道CPIII控制网;自由设站三角高程1三角高程测量基本原理由于高速铁路轨道CPIII控制网建网时利用三角高程进行桥上二等水准点加密,仪器到目标的距离要求不大于100米,最大不得超过150米,因此我们这次讨论的三角高程测量是基于平面且不考虑地球曲率和大气遮光的影响。
如图1所示,地面上A、B两点,在A点设置仪器,B点竖立标尺。
量取望远镜旋转轴中心I至地面上A点的仪器高,用望远镜中的十字丝的横丝照准B点标尺上的一点M,它距B点的高度称为目标高,测出倾斜视线IM与水平视线间所夹的竖角,若A、B两点间的水平距离已知为 ,则有图1可得两点间高差为:若A点高程已知为 ,则B点高程为:(1)这就是基于平面且不考虑地球曲率和大气遮光影响的三角高程测量基本公式。
2自由设站三角高程测量由式(1)可知,要想求得B点高程,仪器不但要架设在已知高程点上,还需要测量水平距离、竖角、仪器高和目标高。
这样不但施测速度慢,而且观测量多,误差来源多,精度就会降低。
如果将全站仪安置在任意位置而且不用量取仪器高和目标高,不但效率高而且减少了变量提高了精度。
假设有一点C(这样的点在施测现场很容易找到),我们在此安置仪器,由式(1)知道,(2)(3)式中:为C点高程,为C点到B点的水平距离,为C点到A点的水平距离,为C点仪器中心I到B点目标M的竖角,为C点仪器中心I到A点目标M的竖角,和为仪器高,和为目标高。
根据是定值,合并(2)式和(3)式得:那么,(4)一旦仪器架设好后,仪器高是不会变的,假设使用相同的目标高度,那么和,和是相等的,所以(4)式可变为:(5)由式(5)可知,待测点B的高程,只与水平距离和竖角两个变量有关,减少了误差来源,提高了测量精度。
三角高程测量在施工测量中,常常涉及到高程测量,传统的测量方法是水准测量与三角高程测量。
两种测量方法各具特色,但都存在不足。
水准测量是一种直接测高法,测定高差的精度高,但其受地形起伏的限制,外业工作量大,施测速度慢;三角高程测量是一种间接测高法,它不受地形起伏的限制,且施测速度较快,在大比例地形图测绘、线型工程、管网工程等工程测量中应用广泛。
但传统的三角高程测量也有其不足之处,即在每一站都需要量取仪器高和读取棱镜高,不但麻烦,而且增加了误差来源,降低了高差测定的精度。
笔者在日常工作实践当中经过不断推导论证,总结出一种比传统的三角高程测量更为简易的方法。
这种方法既结合了水准测量的任意置站的优点,又不必量取仪器高和读取棱镜高,大大减少了三角高程测量的误差来源,使三角高程测量精度进一步提高,施测起来更加快速简便。
下面通过对传统的三角高程测量和简易的三角高程测量进行的对比分析,说明三角高程测量简易方法的优越性。
1三角高程测量的传统方法A与B为地面上高度不同的两点,已知A点高程HA,只要知道A点对B点的高差hAB,即可由HB=HA+hAB,得到B点的高程HB。
首先,我们假设A,B两点相距不太远,可以将水准面看成水平面,也不考虑大气折光的影响和地球曲率的影响。
为了确定A,B两点的高差hAB,可在A点架设全站仪,在B点竖立棱镜,直接量取仪器高i,读取棱镜高l,观测垂直角α,水平距离D,则hAB=V+i-l,故,HB=HA+hAB=HA+V+i-l=HA+Dtanα+i-l式中,HB为B点的高程;HA为A点的高程;i为仪器高;l为棱镜高;V为全站仪望远镜和棱镜之间的高差(V=Dtanα),这就是三角高程测量的基本公式。
但它是以水平面为基准面和视线成直线为前提的。
因此,只有当A,B两点间的距离较短时,才比较准确。
当A,B两点间距离较远时,就须考虑地球曲率影响和大气折光的影响了。
这里只就三角高程测量的简易方法进行阐述论证。
目录
1.引言 (2)
2.三角高程测量计算基本公式 (2)
2. 1传统三角高程测量计算基本公式 (2)
2.2自由设站测量三角高程计算基本公式 (2)
2.2.1自由设站的概念 (2)
2.2.2公式推导 (3)
3.自由设站测量三角高程法在公路工程施工测量中的应用 (3)
3.1 在路基放样施工标高中的应用 (3)
3.2在高填方路基或路堑高边坡(以下统称为高边坡)垂直位移监测的应用。
3
4.结论 (4)
全站仪自由设站测量三角高程的方法
马炳明
(广东省龙浩路桥有限公司,广东省,广州510630)
摘要文章简要介绍了全站仪自由设站测量三角高程的方法及其在公路工程施工测量中的应用
关键词全站仪、三角高程、自由设站、竖直角
1.引言
随着土木工程建设的发展,全站仪的广泛应用,一些新的测量方法应运而生,全站仪自由设站测量三角高程法就是其中的一种。
在此,笔者主要浅谈在单向观测和不考虑球气差改正的情况下,用全站仪自由设站测量三角高程的方法及其在公路工程施工测量中的应用。
2.三角高程测量计算基本公式
2. 1传统三角高程测量计算基本公式
H B= H A+ i+ S *sin a—j⑴
上式就是传统三角高程测量计算基本公式,式中各符号含义如下(假设全站仪架设在A点,要测B点的高程):
H B—待测点B的高程;H A—已知水准点A的高程;i—全站仪望远镜旋转
轴中心的高度;S —全站仪望远镜旋转轴中心到B点棱镜中心的斜距;a—在A 点观测B点的竖直角;j—B点处棱镜中心的高度。
在施工放样时,如直接测出全站仪望远镜旋转轴中心到B点棱镜中心的高差
V,则V = S *sin a,将V代入⑴式,得
H B= H A+ i+ V—j⑵
2.2自由设站测量三角高程计算基本公式
2.2.1自由设站的概念
自由设站是测量中架设仪器的一种方法,全站仪后方交会使用的就是这
种方法。
而三角高程测量的自由设站是相对于传统三角高程测量时固定在水
准点上设站而言。
2.2.2公式推导
CA
全站仪自由设站测量三角高程法示意图
如上图,A点为已知高程为H A的后视水准点,B点为前视待测点,设其高程为H B,分别在A、B两点架设装有棱镜的对中杆,它们的棱镜中心分别为I、J,镜高分别为i、j。
在自由点C处架设全站仪,设其望远镜旋转轴中心K的高程为H K,分别测得K到I、J的高差为V KI、V KJ,于是可按式⑵由H K分别推算A、B两点的高程:
H A= H K+ V KI—i⑶
H B= H K+ V KJ—j ⑷
⑶—⑷得
H B = H A + ( i— V KI ) —(j— V KJ)⑸
式⑸就是自由设站测量三角高程的计算基本公式。
显然,当A、B两点的棱镜高一样即i = j时,式⑸就变成
H B = H A— V KI + V KJ⑹
可见自由设站测量三角高程整个过程中可以不用量取仪器高和棱镜高。
3.自由设站测量三角高程法在公路工程施工测量中的应用
3.1 在路基放样施工标高中的应用
在距路槽顶面约25cm以下路堤填筑或以上的路堑开挖过程中,可以直接用式⑸放样施工标高。
在路堤填筑到一定高度后,如果附近没有较高的结构物可以引测临时水准点,用水准仪放样施工标高就较麻烦。
这时用全站仪直接在路堤上自由设站测量三角高程就显得很便捷(当然,只要对球气差加以改正,在一定范围内路槽面乃至路面、桥涵施工标高的放样也可以使用该法)。
3.2在高填方路基或路堑高边坡(以下统称为高边坡)垂直位移监测的应用。
一般高边坡所在路段地形起伏较大,采用水准测量建立垂直位移监测基准网
和对高边坡垂直位移桩进行监测都很困难,外业工作量大得难以想象,而采用自由设站三角高程测量法就显示出它很强的优势。
下面,浅谈用该法对高边坡沉降点进行监测的方法和技术要点。
观测时,除了注意常规操作的方法及技术要点外,还须相应采取如下措施:①用两台全站仪(或只用一台,但速度要快)同时自由设站对向观测,以消除球气差影响;②两台全站仪分别在距离水准点和沉降观测点相同距离(不超过20m)的地方设站;③在水准点和沉降观测点架立相同棱镜高度的对中杆,使用公式⑹进行计算,以避免量取棱镜高造成的误差;④观测时必须保证成像清晰稳定,减少竖直角照准误差;⑤观测前两个测站均需测定温度和气压并在全站仪里设定,以对边长进行改正;⑥注意控制竖直角和边长,一般要求竖直角小于30°,边长小于200m(如使用有自动照准装置的高精度全站仪,边长可适当加长)。
因为三角高程测量误差主要来源于竖直角观测和大气垂直折光系数的影响,前者主要来源于照准误差,后者可由对向观测抵消,而照准误差跟边长成正比,所以边长不宜太长,以免影响观测精度。
只要按上述方法操作,在最佳时刻观测,使用合适的照准标志,观测精度完全能达到毫米级,满足高边坡沉降观测的精度要求。
4.结论
水准测量、传统三角高程测量两种方法虽然各有特色,但都存在着不足。
水准测量精度高,但受地形起伏的限制,外业工作量大,施测速度较慢。
传统三角高程测量受地形起伏的限制很小,且施测速度较快,但每次测量都得量取仪器高和棱镜高,麻烦而且增加了误差来源,精度较低。
而自由设站测量三角高程法综合了这两种方法的优点。
不但受地形限制更小,设站灵活速度快,而且避免了量取仪器高、棱镜高造成的误差,比传统三角高程进一步提高了精度。
随着全站仪的发展,如采用高精度全站仪,提高竖角观测精度,加上两差改正,采用自由设站法,则三角高程测量完全可以代替四等甚至三等、二等水准测量。